矿用电机车防滑控制技术的研究
2021-07-28郝志宇
郝志宇
(西山煤电集团西曲矿,山西 古交 030200)
引言
电机车是煤矿运输的主要设备之一,具有操作简单、能耗低、负载能力强的优点。矿用电机车的安全运行和制动是平巷不可忽视的问题,作为电机车安全性能指标之一,制动性能占据了重要的地位。电机车制动过程中,在车身还未停下来之前,闸瓦将车轮过早抱死,就会出现滑移现象,车轮和轨道之间的黏着系数减小,制动距离变长。为了防止滑行现象,传统的做法为在轨道上撒沙,也有加装电磁滑靴等措施,这些措施一定程度上能够增加电机车黏着系数,减少制动距离,但是存在效果不佳、成本较高的问题。因此,通过速度传感器采集车轮转速,用滑移率和减速度作为防滑程序的判据,通过防滑排风阀调整电机车制动力,使黏着系数保持在最大值,对缩短制动距离,提高电机车安全性具有重要意义。
1 电机车防滑原理
1.1 黏着系数
电机车开始刹车后,车轮在闸瓦的作用下转速显著降低,车身在惯性作用下继续前进,由此车轮在轨道上的运动有滚筒也有滑动。滑动摩擦力F与电机车对轨道的垂直静载荷P和黏着系数μ成正比,见式(1)。根据目前公认的KALLER滑移理论,黏着系数μ与滑移率λ有关,随着滑移率增加,黏着系数先增大后减小。滑移率λ表达式为(2),式中R为车轮半径,ω为车轮角速度,v为电机车速。因此在电机车制动过程中载荷不变的情况下,为了增加滑动摩擦力,可以通过调节制动力改变车速,从而使黏着系数μ保持在最大值,最大程度上利用黏着防滑[1-2]。


1.2 防滑系统原理
防滑控制系统由输入单元、中央处理单元和执行单元构成。输入单元由安装在电机车轮上的速度传感器和加速度传感器构成,用于采集和计算轮速和车速。中央处理单元由速度信号处理电路和以控制器为核心的控制电路构成[3-4]。信号处理电路将传感器输出的信号经过滤波、变换等处理,变成可被控制器直接读取的信号。电机车启动后,首先控制电路对传感器和排风阀进行检测,若出现某路输入或输出单元原件故障信息,则屏蔽此路防滑通道,保证其他几路通道正常工作,然后发出报警提醒工作人员进行处理。检测完成后开始接收传感器信号,根据速度和加速信号计算速度差、滑移率和黏着系数等量化指标,判断机车的黏着状态,黏着状态不满足防滑要求时发出相应的防滑控制信号,经过功率放大电路后驱动排风阀进行工作。执行单元为防滑排风阀,由电磁阀、膜板、侧体等组成,防滑排风扇有增压、保压和减压三种工作状态,分别对应制动力增大、减小和保持。通过控制两个电磁阀的带电状态改变控制腔内的气压,进而改变制动缸的压力[5]。
2 系统硬件设计
如下页图1所示,速度传感器输出信号经信号调理电路处理,上传数据到单片机,单片机对传感器进行故障诊断,若传感器发生故障则发出报警信号。传感器诊断自检通过后,单片机根据电机车制动信号和速度信号发出相应防滑指令,经功率放大和光电隔离处理后驱动防滑排风阀工作,单片机的其他外围电路有时钟电路、复位电路、电源电路等。

图1 防滑系统硬件结构
2.1 控制参数选择与传感器选型
防滑系统正常工作的前提是控制器及时且准确地对制动时的滑动现象做出判断,判断不及时将造成机车长时间滑行从而擦伤铁轨,判断时机提前则会导致机车制动距离过长。能够判断机车是否发生滑行的物理量有速度差、滑移率、减速度及其微分,目前国内外的防滑系统均采用几个控制参数共同控制。为了提高判断的准确性,本文采用滑移率作为判断是否滑行的主要判据,采用减速度及其微分进行辅助判断。由式(2)可知[6],滑移率由车轮半径、轮速和车速共同组成,在车轮上安装速度传感器获取轮速ω,车速v由间接方法计算而来。常用的计算方法有最大轮速法、斜率法和变斜率法,最大轮速法即是用四个车轮的最大轮速作为车速,这种方法简单但是在四个车轮均有滑移的情况下误差较大。斜率法和变斜率法通过制动时的参考车速和减速度计算车速,这种方法计算的车速与车轮是否滑移无关,准确性更好。
无论采用哪种判据,获取机车的速度都是必不可少的,并且机车的减速度可以通过速度间接计算得到,因此速度传感器的性能对整个系统的性能具有重要影响。传感器选型时应着重考虑井下噪声和粉尘等因素对灵敏度和精确度的影响,常用于矿井环境的的速度传感器有霍尔式、光电式和电磁式,本文选择的霍尔式速度传感器Z9400为非接触式安装,具有宽频带、抗干扰、宽范围、高精度的优点。在车轴端部和轴箱箱盖上分别安装感应齿轮和传感器,二者之间保持1 mm的安装间隙。
2.2 防滑排风阀及其驱动电路
如图2-1所示,防滑排风阀由制动电磁阀VM1和缓解电磁阀VM2共同控制,VM1和VM2上不同的励磁和消磁动作构成4种控制逻辑:VM1和VM2均失电消磁时排风阀增压,VM1得电励磁VM2失电消磁时排风阀保压,VM1和VM2均得电励磁时排风阀减压,VM1失电消磁VM2得电励磁时排风阀禁止[7]。
如图2-2所示为排风阀驱动电路,单片机的控制电压为5 V,电磁阀的供电电压为24 V,因此单片机引脚P1.1与电磁阀之间的接口电路具有信息传递、电压隔离和功率放大功能。当单片机输出低电平时,光耦KPC357NT内的光敏器件导通发出光信号,场效应管导通,IGBT的门极得电导通,电流经24 V电源流过电磁阀线圈,电磁阀线圈得电完成对排风阀的控制。
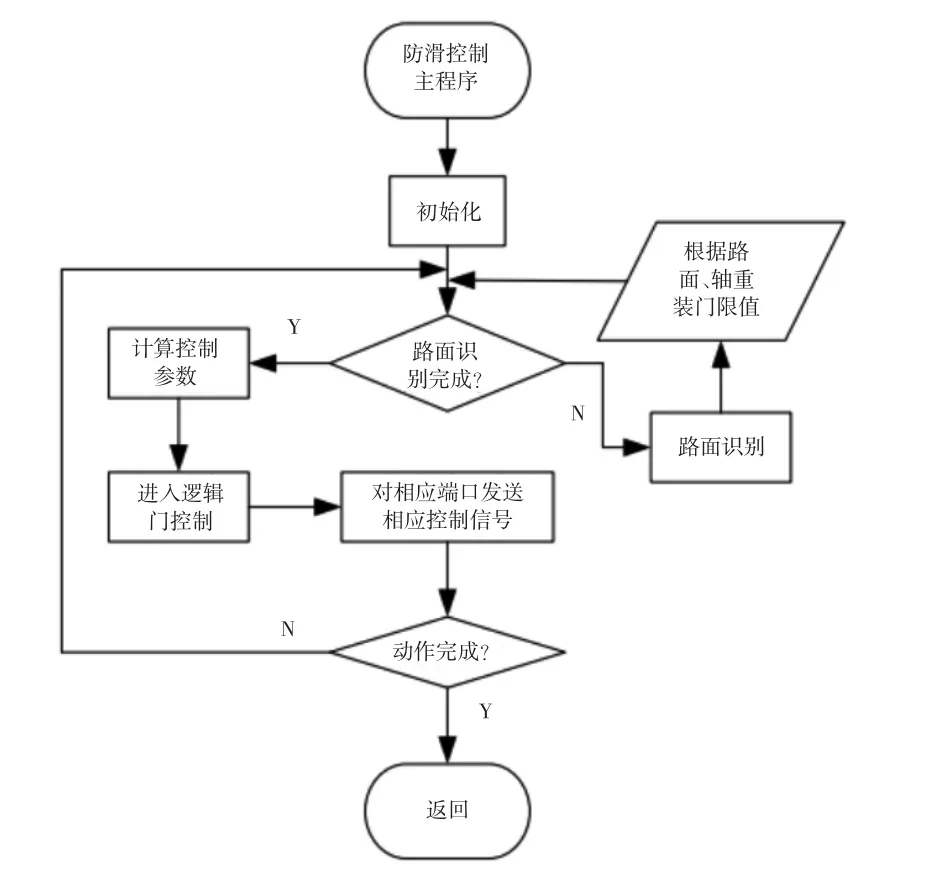
图2 防滑系统软件流程图
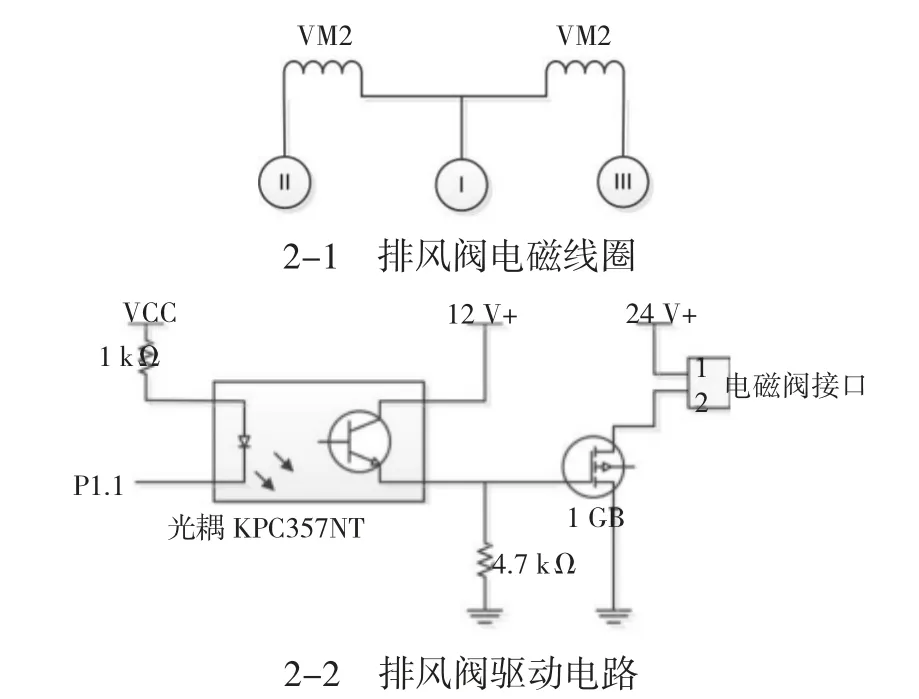
图2 排风阀电磁阀及其驱动电路
3 软件设计
防滑控制系统的算法是软件设计的核心,常用的算法有逻辑门限制控制、滑模变结构控制、模糊控制和PID控制等,逻辑门限制值选用速度差、滑移率、减速度及其微分中的一个或几个作为控制参数,将该控制参数的经验值作为控制门限,当控制参数超过该门限值时启动防滑控制算法。这种算法适用于非线性控制系统,对控制器的计算能力要求低,在汽车防滑控制系统中广泛应用。为了降低控制器成本,本文采用逻辑门限制控制算法,电机车进行制动时并不总是启动防滑控制程序,在车速较低的情况下制动,防滑控制的控制参数达不到门限值,会导致制动距离增大,因此在低速制动时不宜启动防滑制动,直接采用常规制动将车轮抱死即可。
机载软件由系统主程序、防滑控制程序、轮速采集程序和参考车速计算程序等组成,系统程序开始后进行初始化,然后对传感器进行故障检测,故障处理完成后依次采集轴重和轮速,由此计算车速,当车速大于5 km/h启动防滑控制主程序,车速小于5 km/h则启动常规制动。防滑控制程序为核心程序,流程图如下页图3所示。程序初始化后对路面进行识别,根据路面和轴重情况预装载门限值,然后计算控制参数进入逻辑门控制,控制参数超过门限则对相应端口发送相应控制信号,动作完成后返回主程序,动作未完成则继续执行路面识别程序。
4 结语
本文研究的矿用电机车防滑控制系统通过车轮速度传感器采集车轮转速,在单片机内计算滑移率和减速度等控制参数,根据路面和载重情况设定的门限值控制算法判别是否启动防滑算法,通过防滑排风阀的两个电磁阀控制电机车制动力,实现了电机车防滑功能。电机车防滑系统的应用使车轮与轨道间的黏着系数始终保持在最大值,减小了电机车制动距离,降低了车轮与轨道的机械磨损,提高了煤矿电机车的操纵性和安全性。
