多无人艇协同海战中的目标分配算法研究
2021-07-27周菁
周 菁
多无人艇协同海战中的目标分配算法研究
周 菁
(中国电子科技集团公司第二十研究所,西安,710068)
目标分配问题在指控系统中占有重要的地位。为适应多变的战场态势,本文研究了多无人艇协同海战中的目标分配算法。多艘无人艇组成集群对敌方实施联合攻击战术时,需要根据敌我资源的实际组成来制定最优的作战方案。本文提出的目标分配算法为每个个体安排最佳的攻击目标,使集群的协同攻击效能最大。仿真结果表明,该方法可为无人艇集群提供最优的任务分配,是一种辅助决策手段。
无人艇集群;协同攻击;目标分配;匈牙利算法
0 引言
在现代局部战争中,随着无人化、非接触和协同化等作战概念的引入,大量无人作战飞机(Unmanned Aerial Vehicle,UAV)、无人地面战车(Unmanned Ground Vehicle,UGV)和无人潜航器(Unmanned Underwater Vehicle,UUV)等[1]无人装备加入现代战场中,使得战争的作战主体、作战对象和作战形式方面都有了颠覆性的变化。我国正步入高速发展的阶段,海洋军事成为我国军事发展的重要战略。无人水面艇(Unmanned Surface Vehicle,USV)作为新式海战平台,引起了世界军事强国的普遍关注,但作为一种新概念装备,目前其发展不如UAV和UGV成熟。
USV一旦装上了先进的武器系统,就可以在河流、湖泊和海上执行多种水上作战任务,比如近岸的防御、海战场的突击和非战时的侦察与监视等任务[2]。由于作战任务的多重性和复杂性,在使用多艘USV组成集群实施协同作战时,目标分配是多无人艇协同执行任何任务的基础和保障。
目标分配(Target Allocating Problem,TAP)是指挥控制系统经数据融合获得目标精确航迹后形成战斗意图的重要环节[3]。其目的是在满足各项战术和技术指标的前提下,为了达到期望的作战目标,为每个无人艇分配任务[4],即确定哪个无人艇执行哪项任务。在完成任务的同时,使得无人艇集群的整体效能达到最优。
本文研究无人艇集群协同攻击多个目标时的任务分配问题,提出了一种基于匈牙利算法[5]的无人艇集群协同攻击任务分配算法,为艇群中每一艘无人艇分配攻击目标,使各艇相互配合,集群协同作战效能实现最大化。
1 目标分配问题模型
1.1 平衡目标分配
平衡目标分配指攻击任务的承担者和目标数量一致的问题。在敌我海上对抗中,有艘我方无人艇对敌方个目标实施攻击,每艘无人艇刚好攻击一个敌方目标,由于目标属性不同,无人艇占位不同,不同的无人艇攻击不同目标的效能也有差距,因此需要确定哪个无人艇攻击哪个任务目标以便使整体攻击效果最优,即为平衡目标分配。
1.2 不平衡目标分配
平衡目标分配是目标分配中的一种特殊情况,一般情况下,攻击任务承担者的数量和目标数量是不等的。海战场情况复杂,一艘我方无人艇攻击敌方多艘无人艇以及多艘我方无人艇协同攻击敌方一艘无人艇的可能性均存在,即为不平衡目标分配。
1.3 模型的建立
不平衡目标分配比平衡目标分配更为复杂,若我方可用无人艇多于敌方目标,则添加若干虚拟目标,反之则添加虚拟的资源。通过增加“虚拟变量”将不平衡目标分配转化为平衡目标分配问题来处理,可以进行统一的建模和求解。设有艘无人艇来攻击个目标,每艘无人艇只攻击其中的一个目标,则无人艇的目标分配问题的模型可以描述为:

满足:



2 无人艇集群协同攻击目标分配算法
匈牙利算法在进行无人艇集群分配问题求解时有如下性质:
无人艇集群的协同攻击任务分配算法流程如下:

(2)判断任务数和无人艇个数的关系,若不等则转入(3),若相等则直接转入(4)。
(3)增加“虚拟变量”将不平衡任务分配转化为平衡任务分配,进入(4)。
(4)执行匈牙利指派,输出最优目标分配方案。
3 仿真试验
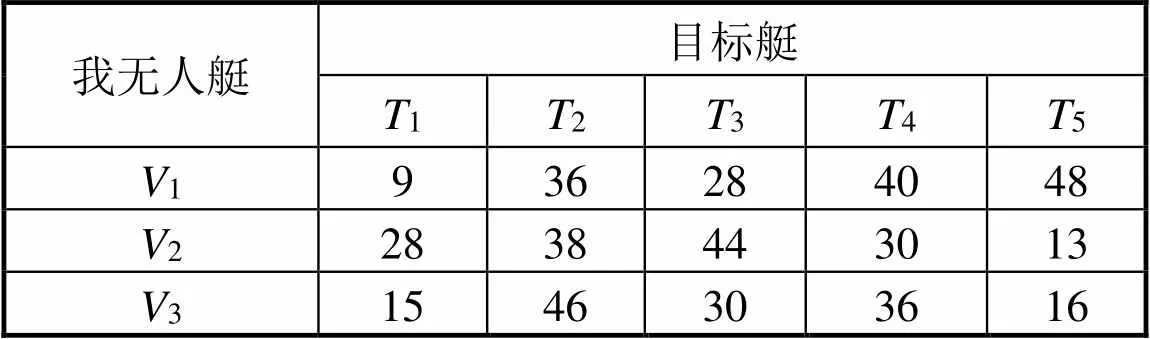
表1 攻击收益R矩阵
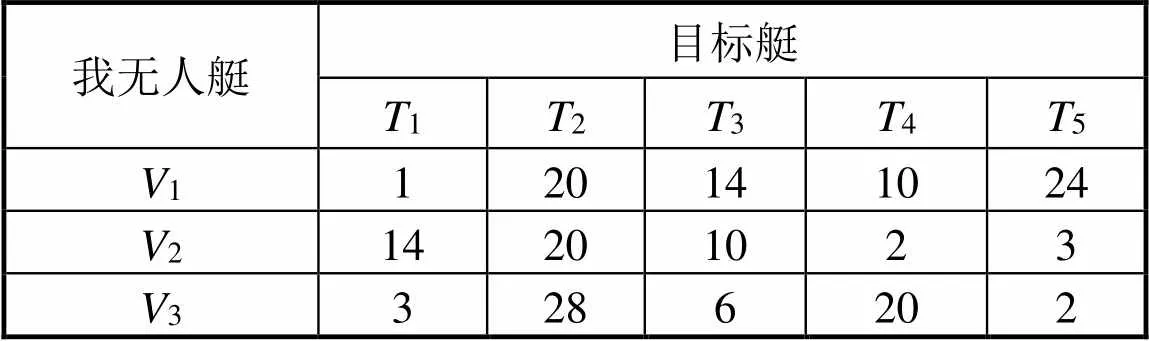
表2 攻击代价B矩阵
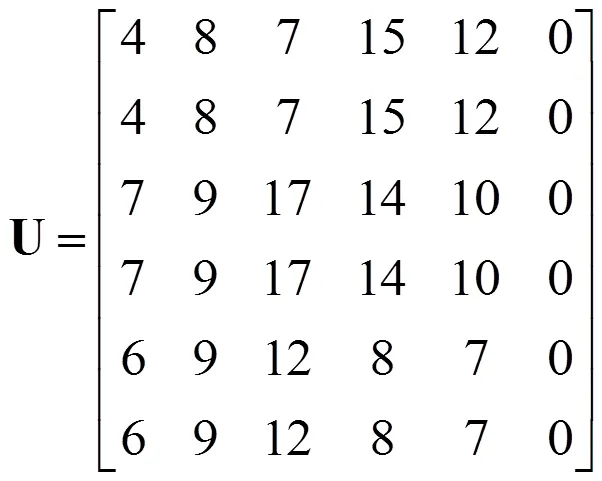
首先增加虚拟无人艇1'、2'、3',分别构成U的第2、4、6行,再增加虚拟攻击任务6'构成U的第6行,增加虚拟变量后的效能矩阵为:
采用本文任务分配算法求解,任务分配结果为:
4 结束语
现代战争需要根据敌我资源态势来决定打击方案,合理有效的任务分配方案为每个个体安排适当的行动,以便提高整个集群的作战能力。本文提出了一种无人艇集群协同攻击目标分配方法,并对算法进行了相应的仿真,结果说明其可为无人艇集群提供最优的目标分配策略,提高集群的协同攻击效能。
[1] 牛轶峰,沈林成,戴斌,等. 无人作战系统发展[J]. 尖端科技,2009,30(5):1-11.
[2] 熊亚洲,张晓杰,冯海涛,等. 一种面向多任务应用的无人水面艇[J]. 船舶工程,2012,34(1):16-19.
[3] 陶英歌,郭乃林,罗红英. 基于遗传算法的目标分配优化模型研究[J]. 系统工程与电子技术,2003,25(7):817-819.
[4] 张博,康凤举,苏冰. 多无人艇联合攻击任务规划模型仿真[J]. 计算机仿真,2015,32(4):349-354.
[5] 栾飞,杨玮. 基于匈牙利算法的自动化立体仓库出入库优化调度[J]. 陕西科技大学学报,2011,29(3):122-125.
Target Assignment Study for Cooperative Naval Battle of Swarm USVs
ZHOU Jing
Target allocating plays an important role in command and control system. In order to adapt to the multi-scene situation, the target assignment algorithm in the swarm USVs is studied in the paper to carry out the joint attack tactics against the enemy, and it needs to formulate the optimal operation plan according to the actual composition of the enemy and our resources. The target assignment algorithm proposed in the paper arranges the best attack target for each individual, so as to maximize the cooperative attack efficiency of the swarm to achieve the best simulation effect. The real results show that the method can provide the optimal task allocation for the USV swarm, so that it is one of means for auxiliary decision making.
Swarm USVs; Cooperative Naval Battle; Target Allocation; Hungarian Algorithm
U674.77
A
1674-7976-(2021)-03-210-03
2021-03-02。周菁(1983.06-),陕西西安人,博士研究生,工程师,主要研究方向为智能规划决策与控制。