分布式干扰对InSAR成像的影响
2021-07-27蒋智辰杨祎綪黄乐天
蒋智辰,杨祎綪,黄乐天
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
干涉合成孔径雷达(InSAR)是一种具有三维成像效果的雷达系统,其在SAR成像的基础上有效结合了干涉技术的特点,并且能够全天候、大范围、高精度地测量三维地形图和地形形变,被广泛地应用于地形测绘、人工建筑三维重建以及火山活动、冰川移动、地表沉降等有关地质学的研究。同时,其在军事方面的应用也非常广,已发展成为各国重要的战场侦察系统,先后投入使用了不少具有重要意义的机载/星载InSAR系统。目前,已对地面重要军事目标构成威胁。所以,对InSAR新的干扰技术研究已经非常迫切。
1 InSAR成像技术
InSAR主要通过以下2种方式得到同一地形地面的复数图像对:(1)通过2个天线同时观测(双天线单航迹,主要用于机载干涉合成孔径雷达);(2)通过2次平行的异步观测(单天线双航迹,主要用于星载干涉合成孔径雷达)。根据成像区域的目标点与天线间的几何关系,利用余弦定理推出复图像共轭相乘得出的相位差,得到相位差的干涉条纹图。对干涉相位图进行相位滤波和相位解缠处理后,形成二维绝对相位图,该图包含了能够真正反映地面目标至两天线之间斜距差的精确信息。最后根据雷达的各项已知参数,包括高度、波长等,能够精确地测量出成像区域内每一点的位置,得到高分辨率、高精度的区域三维图像,最终得到区域的高程图。其基本工作流程如图1所示。
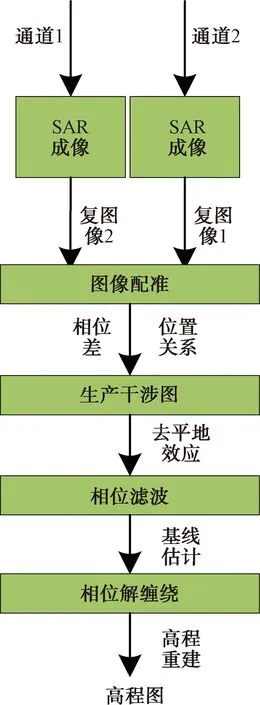
图1 InSAR成像原理框图
干涉合成孔径雷达的测高原理如图2所示。

图2 InSAR成像的几何关系图
图2中,雷达系统的天线分别为T
和T
,它们分别到目标点B
的斜距为R
和R
。α
是两天线间的基线L
的夹角,H
是平台的高度,且上述平台参数α
、H
和L
均能通过平台遥测设备获得,因此它们为已知量。θ
是天线的下视角,地面目标点B
在距离向上的值为x
,h
(x
)是随距离向x
而变化的地面高度函数,再将其推广到方位向上,即函数h
(x
,y
)就为干扰合成孔径雷达成像的高程函数。由图2所示的几何关系以及三角形的余弦定理可得天线的下视角θ
: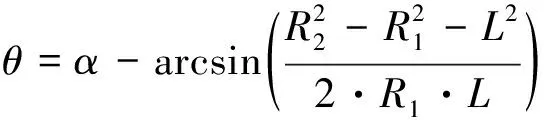
(1)
如果天线T
到目标点的斜距R
可知,则通过测量天线接收到的目标点回波的相位差φ
,可以计得出R
: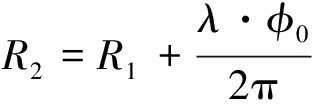
(2)
式中:λ
为雷达信号的波长。
(3)


(4)
由式(4)可知,地面上目标区域各点的高度h
均能够利用该点在2次SAR成像中存在的相位差而推导得出。即各个点目标在SAR成像中的相位都包含了其高程信息。因为模型中天线的倾斜关系,这为解释重复轨道干涉雷达原理提供了依据。2 分布式干扰
图3为两干扰机对InSAR成像系统的原理图。假设天线T
接收到干扰机1发射的干扰信号为s
(t
),接收到干扰机2发射的干扰信号为s
(t
);天线T
接收到干扰机1发射的干扰信号为s
(t
),接收到干扰机2发射的干扰信号为s
(t
)。有关系式如下:
图3 两干扰机示意图
(5)
式中:Δφ
′(t
)为天线T
和T
接收到干扰机1发射的干扰信号的相位差;Δφ
′(t
)为天线T
和T
接收到干扰机2发射的干扰信号的相位差。由两干扰机和两天线的几何关系可知式(5)中的相位差Δφ
′(t
)和Δφ
′(t
):
(6)
式中:R
(t
)为干扰机1到天线T
的距离;R
(t
)为干扰机1到天线T
的距离;R
(t
)为干扰机2到天线T
的距离;R
(t
)为干扰机2到天线T
的距离;λ
为信号的波长。假设干涉合成孔径成像系统在时刻t
时天线位置固定,如图3所示。此时天线T
的坐标为(x
,y
,z)=(0,0,H
),天线T
的坐标为(x
,y
,z)=(L
,0,H
+L
)。其中,L
是两天线间的基线L
在水平方向上的分量,L
是两天线间的基线L
在垂直方向上的分量。干扰机1的坐标为(x
j,y
j,0),此时的相位差Δφ
′(t
)为:



(7)
对式(7)中的y
进行泰勒级数展开并且忽略级数中的高次量,可以得到:Δφ
′(t
)≈
(8)
同理可知,在t
时干扰机2到达两天线间信号的相位差Δφ
′(t
):Δφ
′(t
)≈
(9)
由式(8)和式(9)可知,干扰机1和2到两天线的相位差Δφ
′(t
)和Δφ
′(t
)与两干扰机间的距离R
(t
)有关。当两天线间基线L
垂直于天线的运动轨迹方向时,Δφ
′(t
)和Δφ
′(t
)近似不变,可以分别记为Δφ
′和Δφ
′。假设两天线T
和T
接收到的雷达回波信号经SAR成像后的复图像分别为S
′(x
,y
),S
′(x
,y
):
(10)
式中:φ
(x
,y
)为天线T
接收到的雷达回波信号的相位;φ
(x
,y
)为双天线接收到的雷达回波信号的相位差。假设天线T
接收到的两干扰信号经SAR成像后的复图像分别为S
(x
,y
)、S
(x
,y
),天线T
接收到的两干扰信号经SAR成像后的复图像分别为S
(x
,y
)、S
(x
,y
)。此时,由式(5)可知,天线T
和T
的SAR成像复图像S
″(x
,y
)和S
″(x
,y
)的关系为:
(11)
(12)
式中:Δφ
′(x
,y
)为Δφ
′(t
)经过SAR成像后的相位差;Δφ
′(x
,y
)为Δφ
′(t
)经过SAR成像后的相位差。当两干扰机发射的干扰信号相同时,即S
(x
,y
)=S
(x
,y
),则式(12)可化简为:
(13)
式中:A
(x
,y
)为由SAR成像后的相位差Δφ
′(x
,y
)和Δφ
′(x
,y
)的模值。当基线垂直于轨迹方向时,Δφ
′(x
,y
)和Δφ
′(x
,y
)是近似不变的,即Δφ
′(x
,y
)≈Δφ
′,Δφ
′(x
,y
)≈Δφ
′。则此时的模值A
(x
,y
)可以近似为常数A
。所以,式(13)可以变为:
(14)
由式(13)可知,天线T
的通道形成的复图像和天线T
的通道形成的复图像间,模值差A/
2为常数,相位差为[Δφ
′(x
,y
)+Δφ
′(x
,y
)]/2。因此,经过SAR成像后的复图像全信号S
(x
,y
)和S
(x
,y
)的表达为:
(15)
将式(10)和(14)代到式(15)中,得式(16)。

(16)
对比式(16)中两天线的复图像可以得出:(1)目标回波信号分布在雷达复图像中的任意位置,其相位差是随目标位置变化的;(2)干扰信号如目标回波信号一样分布在复图像中的任意位置,其相位差却是方位向的缓变函数;(3)当干扰信号的幅度较大时,InSAR系统成像后得出的高程图就会呈现出一个斜坡;(4)两干扰机在方位向上的位置会造成干扰信号间的相位差变化,对最终的高程图存在影响。
3 仿真分析
仿真参数设置:信号载频5 GHz,脉冲重复周期2 ms,脉冲宽度10 μs,信号带宽50 MHz,系统采样频率100 MHz,天线的下视角θ
=50°;天线的高度H
=20 000 m,方位向速度为1 000 m/s,其余均为0。干扰信号采用射频噪声,调制噪声带宽60 MHz。图4是仿真所用的模拟场景模型经过成像系统形成的高程图。
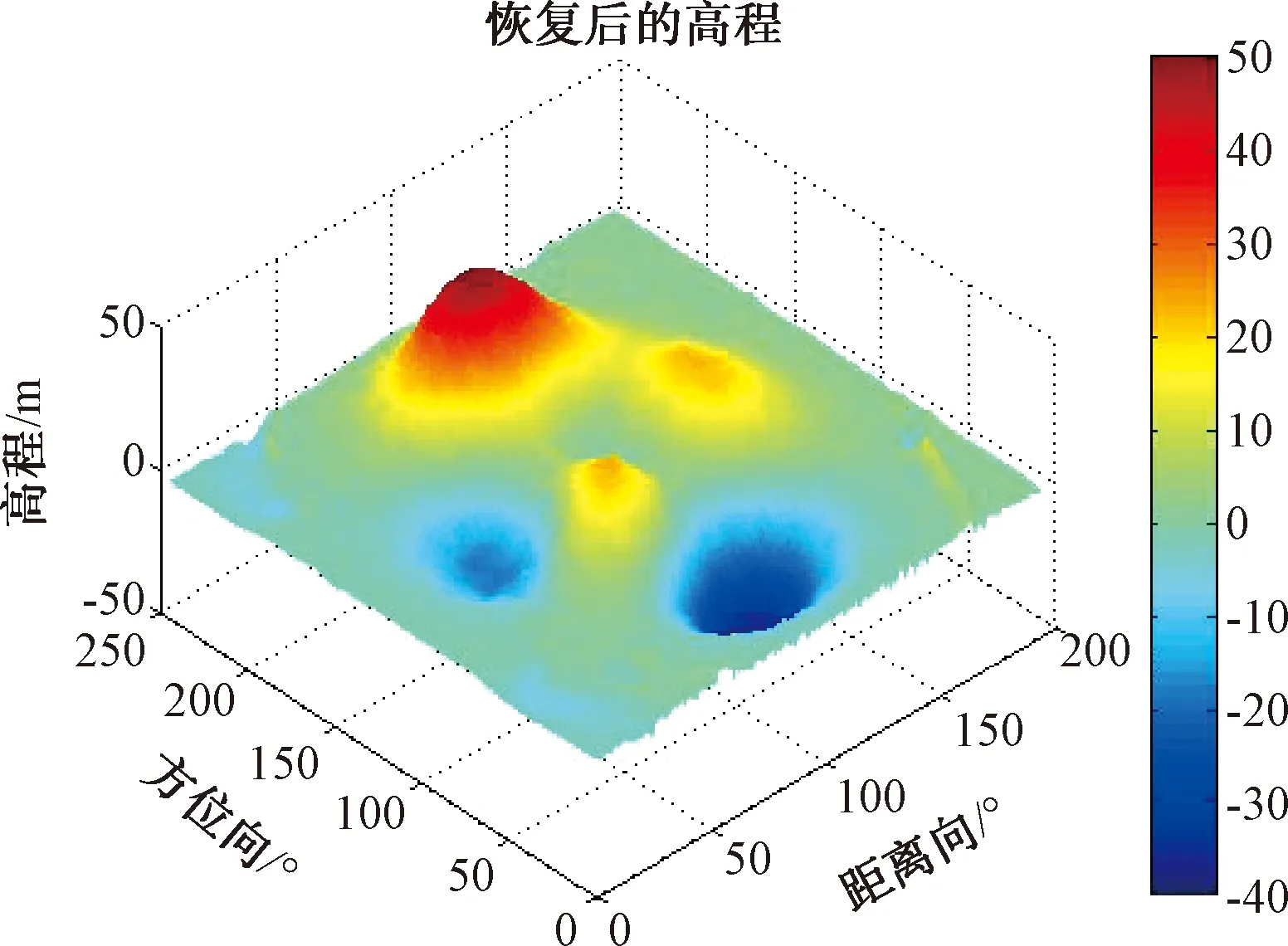
图4 仿真场景InSAR恢复后的高程图
图5是单部干扰机的干扰信号及仿真场景经过成像系统形成的高程图,其中干扰信号和目标回波信号的功率比为12 dB。
由图5可知,单部干扰机工作时,经过InSAR成像系统恢复后的高程图为一个均匀分布的斜坡。
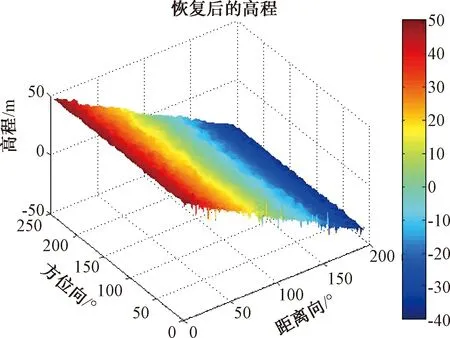
图5 干信比为12 dB的单部干扰机恢复高程图
图6(a)~(g)为2部干扰机的分布式干扰的高程图,2部干扰机在方位向上的距离由50 m至1 900 m,干扰机1、2的干扰信号和目标回波信号的功率比均为6 dB。
如图6所示,分布式干扰能够对InSAR的成像效果产生影响,并且2部干扰机之间的距离对成像效果能够产生不同的影响。如图6(a)、(b)、(e)、(f)和图5所示,2部干扰机的干扰效果与单部干扰机的干扰效果类似。如图6(c)、(d)、(g)和图4所示,在此时2部干扰机的干扰信号不能完全遮盖目标回波信号,因此经过InSAR成像系统后,恢复的高程图中仍能发现模拟成像场景。
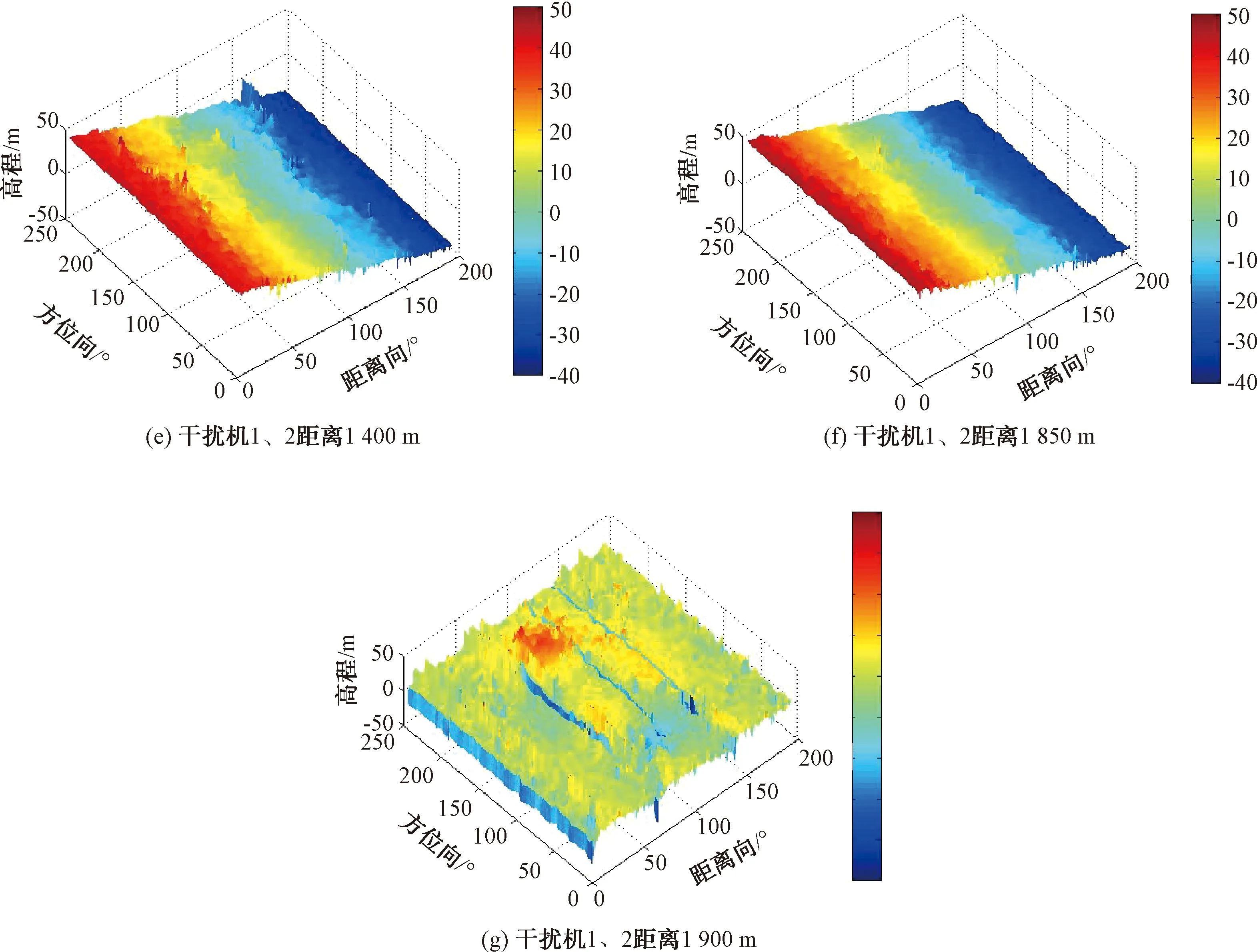
图6 干扰机1、2分布干扰的恢复高程图
4 结束语
干涉合成孔径雷达具有全天候、全天时工作的优点,同时拥有部分穿透能力,在军事领域能够发挥重要作用。本文主要研究了InSAR成像的原理以及分布式干扰对InSAR干扰的原理以及成像的影响。仿真了分布式干扰对InSAR成像的影响,通过仿真可以证明,两干扰机的干扰能够对InSAR实施干扰,并且两干扰机之间的距离能够对InSAR成像产生不同的影响。