雷达侦察型无人机任务载荷校准技术研究
2021-07-27张周贤赵先红孙志敏阳治平
张周贤,赵先红,王 彧,孙志敏,阳治平
(成都飞机工业(集团)有限责任公司,四川 成都 610091)
0 引 言
数字阵列测向和数字干涉仪测向作为高精度的测向方法,主要通过比较射频信道到达天线阵的相位差进行测向,经过信号处理,得到来波的方向,是电子对抗侦察领域的重要技术,目前已得到了广泛的应用。由于采用宽频带多通道接收机进行信号处理,难以保证各通道幅度相位的一致性,各通道之间幅度和相位不匹配,因此引入测向误差。测向精度不仅与系统测向算法、各天线性能响应、各通道幅度相位有关,在电缆、天线等安装、使用和维护过程中也会引入测向误差。如某雷达侦察型无人机,其天线罩和无人机蒙皮共形,任务载荷天线单元内埋在机身内部,由于任务载荷侦察天线都是宽波束天线,天线内埋后对电磁信号幅度和相位特性影响较大,因此必须采用一定的校准手段,实现对电磁特征影响的评估,对初始相位误差进行精确估计与校正补偿。如何对某雷达侦察型无人机任务载荷进行校准,从而减少甚至消除所引入的误差,提供系统的测向精度,是本文研究的出发点。本文基于某雷达侦察型无人机任务载荷,研究其校准技术和方法,并完成地面校准和测向验证,效果良好,具有较高的工程应用价值。
1 测向原理分析
射频信号相位测向是根据电磁波从不同的方向到达天线阵时,各天线阵元接收到的信号相位不同,通过测量各阵元输出的信号相位差就可以确定来波方向。图1所示是一个简单的单基线数字测向系统。通过对图1的分析可以了解数字测向的基本原理。
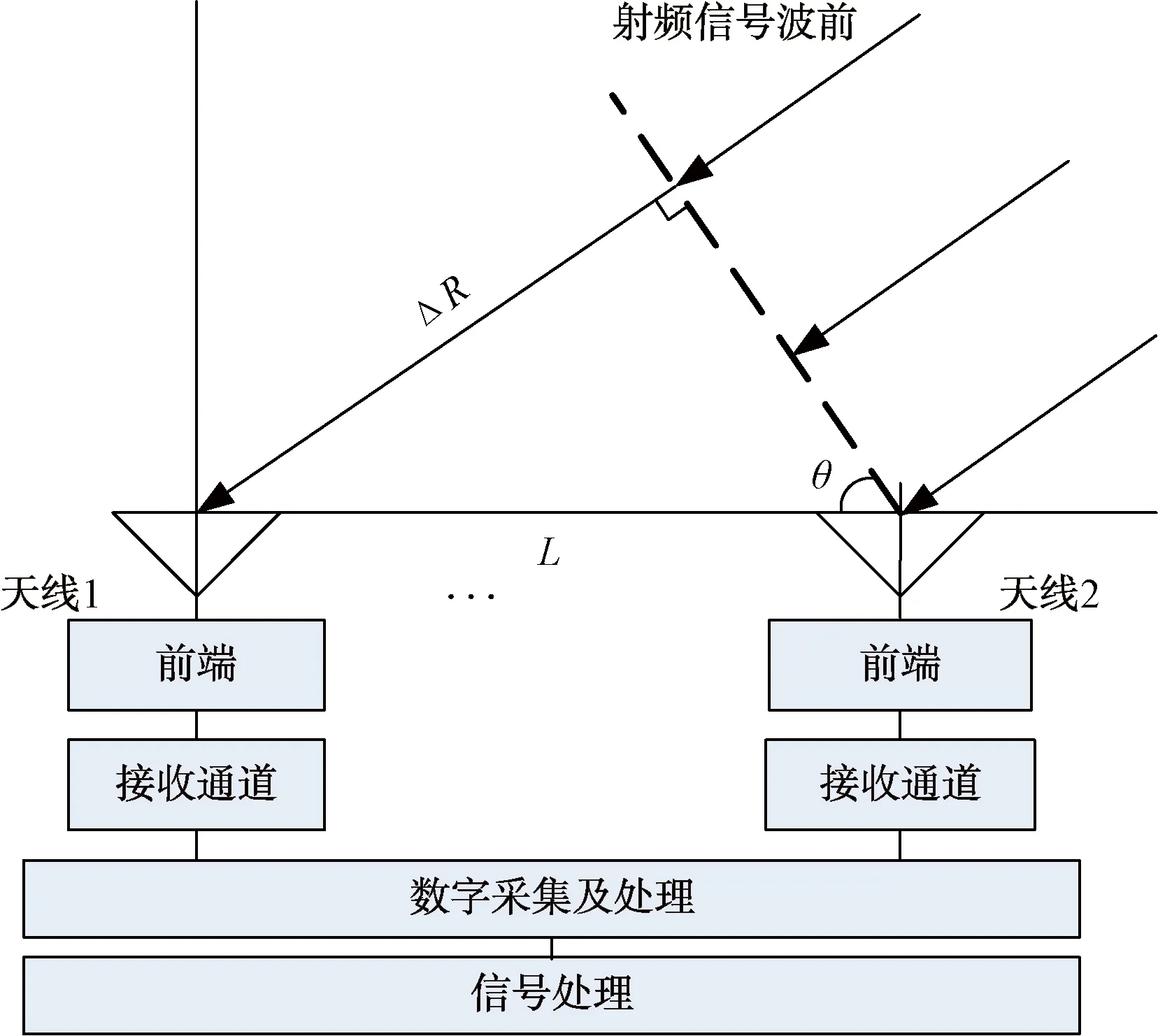
图1 数字测向系统基本原理框图
假设射频信号入射方向与天线法向方向偏离角度为θ
,根据远场条件,可认为电磁波为平行波入射,波平面到达两天线的信号相位差为φ
,则有:
(1)
式中:c
为光速;λ
为电磁信号波长,λ
=c/f
;f
为信号载频;L
为两天线相位中心距离,即基线长度。一般情况下,由于制造工艺等原因,天线相位中心和几何中心严格意义上并不重合。由上式可以看出,在天线阵设计布局和信号载频确定时,可以由通道相位差得出射频信号的到达角θ
,最终得到来波的方向。同理,对于多基线线阵或二维面阵(圆阵列),可以以其中某一天线的接收通道值作为参考基准。当天线阵接收到来自外界来波信号时,通过射频通道完成对多路信号的变频处理,将射频信号变频为中频信号,送至数字采集及处理单元,完成对中频信号的数字采集、信号检测和参数测量,再经过信号处理单元进行相关处理后,最终得到PDW(脉冲描述字)的分选结果、测向信息、定位信息等。2 测向精度分析
测向精度即指到达任务载荷天线阵的辐射源电磁波的来波方向,经过任务载荷处理后得到的测向结果(均方根统计值),是任务载荷测向性能的重要指标之一。为了研究对测向精度影响的因素,即对测向误差来源进行分析,对式(1)求偏导数,可得:

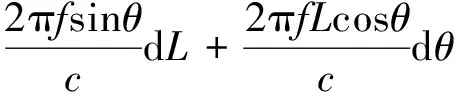
(2)
将微分改为增量形式,得到:

(3)
由上式可以看出,测向误差主要来源为相位差测量误差、信号频率误差和基线测量误差等。而当天线阵安装布局固定后,基线长度也就相对确定,即使相位中心与几何中心不一致,也可通过一定手段进行补偿校正,而任务载荷频率测量精度基本能够消除信号频率误差的影响,因此主要影响因素为相位测量误差。
各接收通道幅度相位不一致性是引起相位测量误差的主要原因,而各接收通道幅度相位的不一致性主要由信道中各个元器件相位特性所确定。图2为对数字接收机通道的基本原理模型,一般来说,从天线端(包括天线罩)到接收前端部分为外通道,从前端到信号处理部分为内通道。
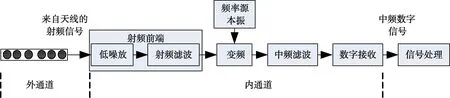
图2 数字接收机通道基本原理模型框图
来自天线阵的射频信号经过射频前端,完成频段选择、信号限幅、放大、陷波、滤波等处理后,再由变频模块完成从射频信号至中频信号的转换,经过滤波后,送至数字接收模块,将相关中频信号进行模数(AD)量化、信号检测和参数测量,生成中频数字信号,再送至后端进行处理。
由于任务载荷天线阵每个阵元到数字处理端都有一个独立而完整的通道,尽管各个通道由相同电路、相同型号的元器件组成,但是由模拟器件组成的电路不可能完全相同,从而导致各个通道电参数会有一定的差异,其频相、幅相特性一致性有限。而在实际工作中,幅度相位不一致性还会随着接收机工作频率、电压、环境温度、湿度、器件老化、设备安装等因素的变化而产生相位漂移。
综上所述,信号测向误差主要来源为各通道幅度相位的不一致性、天线阵元位置误差、阵元间电磁耦合、阵元本身响应和近场信号源入射等,而天线阵元和射频电缆的安装也会带来不同程度的影响,在保证安装精度、电缆转弯半径等要求的情况下,在长期的使用维护过程中,各接收通道性能参数亦会由于人为或自然性质变化从而导致信号通道性能传输的变化。根据数字阵列测向和数字干涉仪测向技术原理,其测向方法已弱化了天线阵本身所带来的不利影响,从天线阵元输出端到接收机输出端的通道并不会改变各天线阵元间信号相位的相对关系,通道间信号的相位差完全由电磁波到达天线阵各天线的波程差决定。因此,保证各接收通道的幅度和相位特性一致是确保完成对辐射源信号精确测向的前提,是无人机完成电子对抗侦察任务的基础,否则通道间的幅度相位失衡会引入附加相位,导致测向误差。因此,需要研究某雷达侦察型无人机任务载荷校准技术,采用有效措施和技术消除各接收通道幅度和相位偏差,确保各接收通道的一致性。
3 校准原理分析
在任务载荷天线阵元及电缆装机前,需要对射频电缆和天线阵单元的安装环境进行分析,结合实际装机位置,合理布局射频电缆和天线的安装。其一,电缆要保证良好接触,尽量减少弯折,一定要弯折时,必须要保证电缆最小的转弯半径;同时,在使用过程中需要尽量减少电缆插头的插拔次数,如果插拔超过一定次数后,需要对电缆插头进线检查,以确保电缆的电性能。其二,天线阵元安装时,同一频段的天线阵单元中心应保证在同一直线上,天线安装板与天线罩内表面之间使用吸波材料填充;对天线阵元的安装阶差和缝隙使用导电胶条进行平滑处理,确保天线阵良好的工作环境,保证响应性能;同时,基于机体坐标系,需要对天线阵的安装角度偏差精度进行校准,保证安装位置的精度要求,并将相应的校准修正值写入系统的配置软件中,通过系统软件补偿的方式自动对测向结果进行修正。主要采用外辐射信号源的方法进行校准和测向验证,保证各接收通道的一致性。
图3为外辐射信号校准的简单原理框图。选择任务载荷需要校准的频段,设置辐射信号源的频率、脉宽、脉冲重复周期等参数,并保证与侦察的雷达信号同频同调制。通过标准喇叭天线向机载任务载荷天线阵辐射,辐射源信号脉冲到达天线阵时,以其中某个通带内较平坦、畸变较小的通道作为参考通道,其余各个通道与参考通道做比较,得到包含通道幅度相位失衡引入的相位误差的相位差,得到具有良好一致性的频率传递函数,形成初始校准表,同时可以适当调整频率的步进,对校准数据进行修正更新,并根据幅度和相位的校准判据,确认天线阵法向校正值。完成所有频率的校准数据后,将校准表下发至系统的软件配置中,系统在工作时自动完成测向方位修正,以满足系统测向精度要求。

图3 外辐射通道幅相一致性校准原理框图
在完成校准值更新后,需要进行外辐射测向推车验证,如果不同角度下各通道幅度值差异较小,基本保持平稳,无明显凹坑,测向值相位差连续,变化趋势基本一致,无明显突变,则完成校准的测向验证。
一般情况下,任务载荷校准要求载机处于空旷场地,地面平整,周围无反射、无遮挡,校准辐射源距离载机50 m以上。进行信号源辐射时,由于地面杂波反射等影响比较严重,因此需要在辐射信号源与载机天线阵之间铺设吸波材料,以减少地面反射带来的影响,并且吸波材料的铺设方式对校准结果都有一定影响。
4 校准应用及测向验证
4.1 校准应用过程
在某雷达侦察型无人机任务载荷实际校准和测向验证的过程中,首先,根据天线阵的安装方式和位置,确定地面基准点,标定天线阵的法线方向,作为校准参考基准方向。其次,完成校准后,需要对测向性能进行确认验证,因此需要标定测向方位点,确定测向验证点的位置,一般选择20°,30°,45°的位置,然后再进行辐射信号源推车验证。同时,根据地面杂波反射情况,铺设吸波材料,以消除多径反射影响。
首先要确定地面基准点。如图4所示,根据地面基准点,使用激光水平仪完成天线阵基准线和辐射源信号基准线的标记,并在基准线上确认天线阵中心点和辐射信号源中心点。在信号源基准线的基础上,进行测向验证点的标记,由于信号源基准线到天线阵基准线距离一般超过50 m,为了精确标记验证点,可先找辅助标记点,再用卷尺等测量完成标记。对于地面杂波发射、多径反射等的影响,根据辐射信号源与载机天线阵离地高度,可以尝试通过更换吸波材料的位置观察各通道幅度和相位差,来确定反射影响的方向。选取各通道幅度最高的吸波材料铺设方式以消除反射影响,并且吸波材料的辐射范围以天线阵法向±45°为宜。以低波段为例,典型的吸波材料的铺设方式如图5所示。
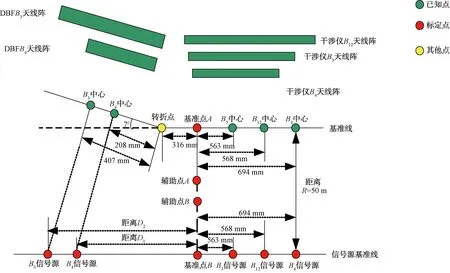
图4 任务载荷天线阵法线标记示意图

图5 吸波材料典型的铺设示意图
在实际的装机环境情况下,B
中心和B
中心只相隔5 mm,由于辐射源放置距离天线阵中心点一般为50 m,因此可以将B
信号源和B
信号源合成为一个点,不影响对2个波段的校准。校准时,先进行通道内校准,通过通道内校准得到各通道的幅度、相位初始差值;完成通道内校准后,再进行通道外校准,得到包括天线罩以内的接收通道的校准值。将校准表下发后,对法线方位点进行全频段测向,观察测向结果,若测向结果和预期的基本一致,则认为校准正确,更新校准值并下发至系统软件配置中;若发现某频点测向值不正确,则需要对出错频点重新校准,校准完成后下发校准表并重新测试,直到测向正确为止。
4.2 校准值测向验证
在完成各天线阵通道校准后,需要对得到的校准值进行测向验证。以某个侦收支路为例,其校准值数据及验证过程如图6所示。设置信号源中心频率为2.8 GHz,信噪比为10 dB,对某支路进行2~18 GHz全频段验证。在验证过程中,要确保发射天线指向天线阵,并尽量保持匀速。整理数据,统计测向精度值,在天线阵法线方向±45°以内无测向跳点,测向精度值(rms)在0.6°左右。

图6 校准数据的验证
一般情况下,雷达任务载荷首次装机,或者更换相关天线和电缆后,需要进行全面的校准工作。完成校准后,后续只需周期性进行通道内校准,通过软件修正方式来保证各接收通道的幅相一致性。
5 结束语
本文基于测向原理,分析了影响测向精度的主要因素,针对某雷达侦察型无人机任务载荷各接收通道幅度相位不一致性,分析了其校准技术原理和方法,并将校准方法应用在某型无人机任务载荷校准过程中。对校准方法分析和实际外场验证表明,可以对任务载荷各接收通道幅度相位进行补偿,实现了通道间的幅相一致性,有效提高了校准工作效率,保证了系统测向精度。经过试飞验证,对雷达辐射源目标测向精确,定位精度高,满足功能要求,具有较高的工程应用价值和现实意义。