五自由度运动误差测量系统关键技术研究
2021-07-25张忠宁宋治崑范宇超范光照娄志峰
张忠宁,宋治崑,范宇超,范光照,娄志峰
(大连理工大学机械工程学院,辽宁 大连 116024)
0 引言
作为制造业的工业“母机”,数控机床扮演着现代制造业核心输出者的角色。随着现代工业的快速发展,对数控机床加工准确度提出了越来越高的要求。为通过误差补偿法提高机床加工准确度,研制一套机床误差高效测量仪器具有重要意义。
当机床线性工作台沿导轨运动时,会产生六个自由度的几何误差,Lee C[1-2]基于激光干涉原理设计了一种用于超精密导轨的六自由度误差测量系统,其角度分辨力可达0.02″。房丰洲等人[3]在全息透镜分光原理的基础上提出了一种基于激光衍射原理的六自由度误差测量系统,该系统结构简单,但滚转角分辨力有待提高。K.C.Fan[4]提出基于四准直光束的六自由度误差测量方法,采用四套多普勒测量仪及两个光电探测器组成测量系统,在进行误差测量的同时实现了误差分离。冯其波等人[5-6]提出了基于三准直光束的具有共光路补偿功能的六自由度测量方法。
在六自由度误差中,滚转角误差测量相对较难[7-8]。陶卫等人[9]提出了基于双光束干涉法的滚转角测量方法,利用特制的楔形反射光栅作为敏感器件,其角度分辨力可达0.1″。匡翠方等人[10]提出一种以1/4波片作为敏感单元的偏振差分测量方法,该方法结构简单,但对光源稳定性要求很高。K.C.Fan[11]提出了一种基于双平行光束的滚转角误差测量方法,通过测量直线度误差间接得到滚转角误差,但该系统成本较高且结构复杂。曹睿等人[12]采用特殊棱镜作为敏感单元,通过双光束间接测量滚转角误差,但该方法对其敏感元件加工准确度要求很高。
上述各测量方法应用场合不尽相同,且难以同时兼顾测量准确度、便捷性和成本。本文基于激光准直原理,提出一种利用双光束进行五自由度误差同步测量的方法,并研制了相应的测量系统,该系统具有结构简单、便于集成、造价低等优点,为多自由度误差测量技术发展提供了有力支撑。
1 五自由度运动误差测量系统原理与研制
设计的五自由度运动误差测量系统可同时测量线性平台的两个直线度误差(δx和δy)和三个角度误差(偏摆角εx,俯仰角εy和滚转角εroll)。其中,直线度误差及偏摆、俯仰角度误差基于激光准直原理进行测量,滚转角误差通过双光束法间接测量。五自由度测量系统光学结构如图1 所示,该系统由激光端和感测端两部分组成,激光端为固定单元,感测端安装在线性平台上,可沿导轨滑动。
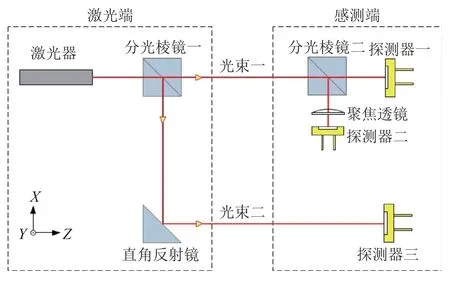
图1 五自由度测量系统光学结构示意图
由半导体激光器发射的光束经分光棱镜一后分为2束光,光束一经分光棱镜二后,其透射光由探测器一接收,用于直接测量水平及垂直方向直线度误差;其反射光经聚焦透镜聚焦后由探测器二接收,用于测量偏摆角及俯仰角误差。光束二射入探测器三中,所测得的垂直方向直线度误差与探测器一所测得的垂直方向直线度误差做差分处理,间接得到滚转角误差。
1.1 直线度误差测量原理
直线度误差测量原理如图2 所示。当完成光束与导轨运动轴线的平行调整后,将光束作为测量基准进行误差测量。当导轨无直线度误差时,投射在探测器一上的光斑将位于探测器一的中心;若存在直线度误差,探测器一的中心将相对于光斑产生位移,水平和垂直方向上的位移Δx和Δy即为所测得的线性平台直线度误差δx和δy。
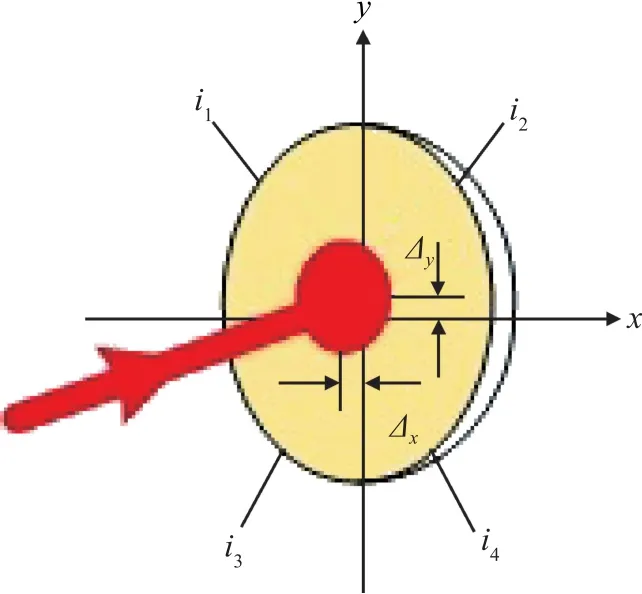
图2 探测器一所测光斑位置
由四象限光电探测器的位移感测原理可知,光斑在探测器表面的位置发生变化时,探测器内四块光电二极管的输出电流会发生变化,利用式(1)和式(2)即可计算得到直线度误差。

式中:kδx和kδy为常量,可通过电感测微仪标定得到;i1,i2,i3,i4分别为探测器一4 个象限的输出电流。由于电流量为模拟量且非常微弱,不能直接用于采集处理,需将其转化为可采集的电压信号后再进行标定实验。
1.2 偏摆、俯仰角度误差测量原理
偏摆、俯仰角误差的测量原理如图3 所示,当线性平台存在微小偏摆角度误差εx时,经分光棱镜反射后的反射光也会产生角度变化,从而导致探测器上激光聚焦光斑位置产生变化,即Δx1。
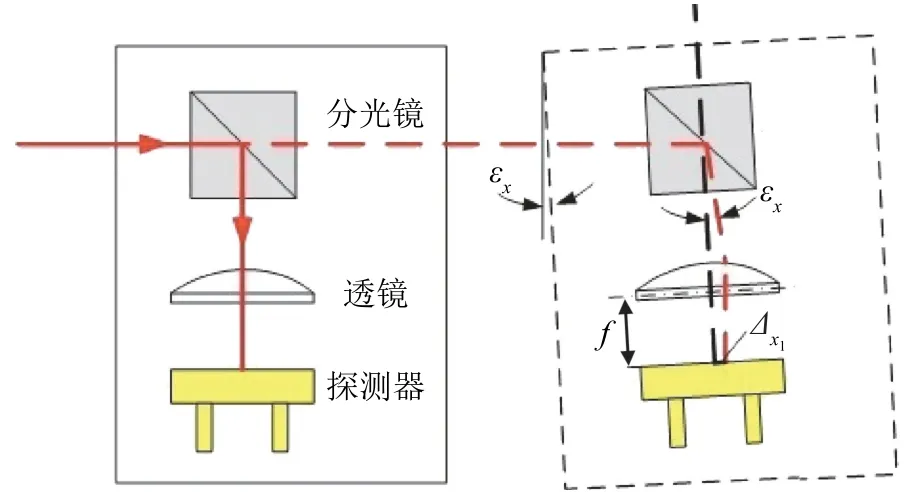
图3 角度误差测量原理图
因此,可以得到偏摆角误差

式中:f为聚焦透镜和探测器之间的距离,即透镜的焦距。
当线性平台存在微小俯仰角度误差εy时,同理可得到俯仰角误差为

1.3 滚转角误差测量原理
采用双平行光束测量原理,通过探测器一及探测器三所测得的竖直方向直线度误差间接得到滚转角误差。如图4 所示,当工作台在移动过程中产生滚转角误差εroll时,投射在两个四象限探测器上的光斑在竖直方向上的位置会产生相应变化,即分别产生不同的竖直方向直线度误差δy1和δy3。
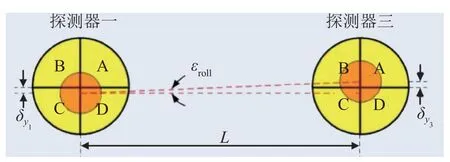
图4 滚转角误差的计算
可计算得出滚转角误差值为

式中:δy1和δy3分别为探测器一和探测器三测得的直线度误差;L为2 个四象限探测器的中心距离。在实际误差测量过程中,L远远大于δy1和δy3的差值,因此根据等价无穷小变换,可将上式简写为
1.4 滚转角误差的补偿修正机理
进行滚转角误差测量前需将双光束调平,然而实际操作时无法保证双光束绝对调平行,此时会存在双光束不平行度θ0,影响滚转角误差的测量准确度。因此,需通过水平仪预先测量系统双光束不平行度。
当双光束存在不平行度θ0时,如图5 所示,探测器三所测垂直方向直线度误差的变化会直接影响滚转角误差测量。
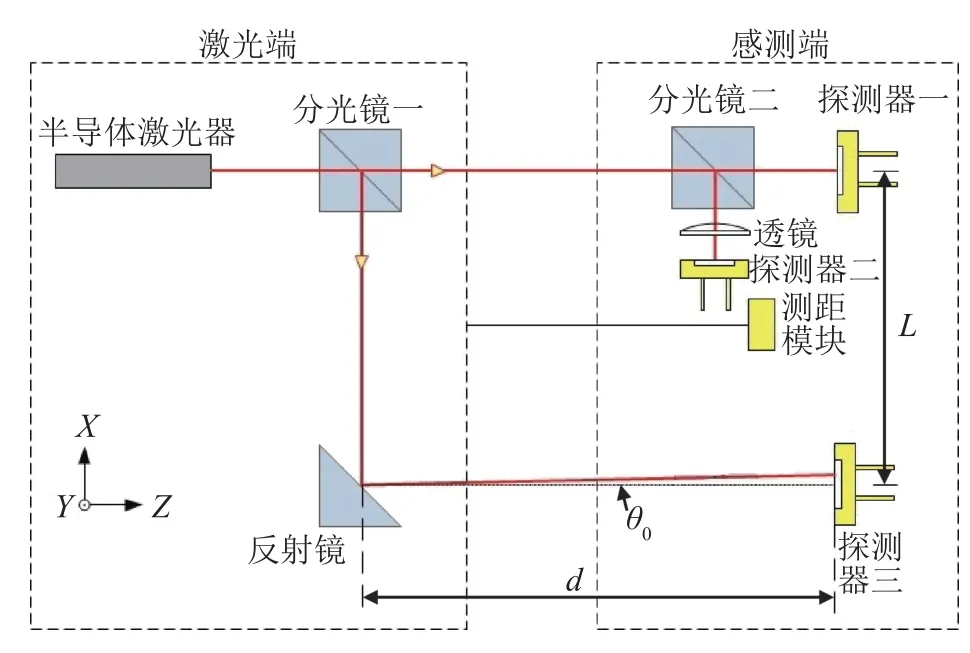
图5 光束校准原理图
由滚转角误差的计算公式可推导得出

式(7)中θ0用弧度表示,由等价无穷小变换可将上式简写为

式中:L为探测器一和探测器三的中心距离;d为仪器测量距离(由测距模块测得);εroll为水平仪测得的滚转角误差,ε′roll为仪器测得的滚转角误差,ε′roll-εroll即为光束不平行度对测量滚转角误差的影响值。根据式(7)可以看出由双光束不平行而产生的滚转角误差影响值与测量位置呈正比例关系,因此可通过实验求出双光束不平行度θ0后,对双光束进行补偿修正。
1.5 五自由度运动误差测量系统
基于上述测量原理,研制了五自由度运动误差测量系统,如图6 所示。其中感测端集成了三维角度调整机构,用于调整系统位姿;磁性表座吸附在机床主轴上,激光端与磁性表座通过连杆固定连接。该系统具有体积小、易安装的优点。

图6 五自由度运动误差测量系统实物图
在研制的五自由度误差测量系统中,从半导体激光器(型号为ZLM100AD650 -24GD)发出的准直激光束直径为3 mm,光斑为正圆光斑且大小可调,发散角度小于0.02 mrad。四象限光电探测器采用德国的First Sensor 传感器,其中负责测量直线度和滚转角误差的探测器一、探测器三型号为QP50 -6 -TO8S,四象限的有限面积为4 × 11.78 mm2,测量分辨力可达0.05 μm,水平直线度和垂直直线度误差的理论分辨力为0.05 μm,滚转角误差的理论分辨力为0.1″。用来测量偏摆和俯仰角度误差的探测器二型号为QP10 -6 -TO5,四象限有效面积为4 ×2.45 mm2,其测量分辨力可达到0.01 μm,系统使用的聚焦透镜的焦距为20 mm,经计算后偏摆角和俯仰角误差的理论分辨力为0.1″。
2 五自由度运动误差测量系统标定
2.1 直线度标定
采用电感测微仪(型号为Mahr1240,分辨力0.01 μm)与手动微调位移台相结合进行直线度标定实验。将感测端安装在可以进行水平、垂直方向手动微调的位移台上,并将测微仪的测头与之固定相连。标定垂直方向灵敏度时,通过调节使系统进行垂直方向移动,移动范围为±100 μm,位移台单次移动量为20 μm,同时记录四象限光电探测器的电压比值和电感测微仪的读数,进而通过软件将数据进行最小二乘法拟合处理得到探测器灵敏度值。标定实验现场如图7所示,标定结果如图8 所示。
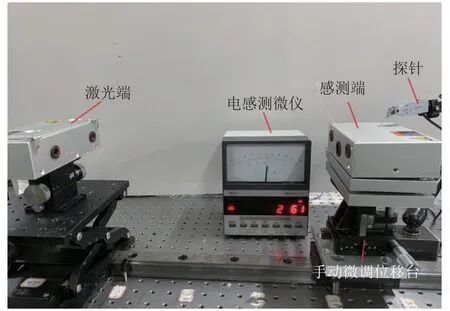
图7 直线度标定实验现场图
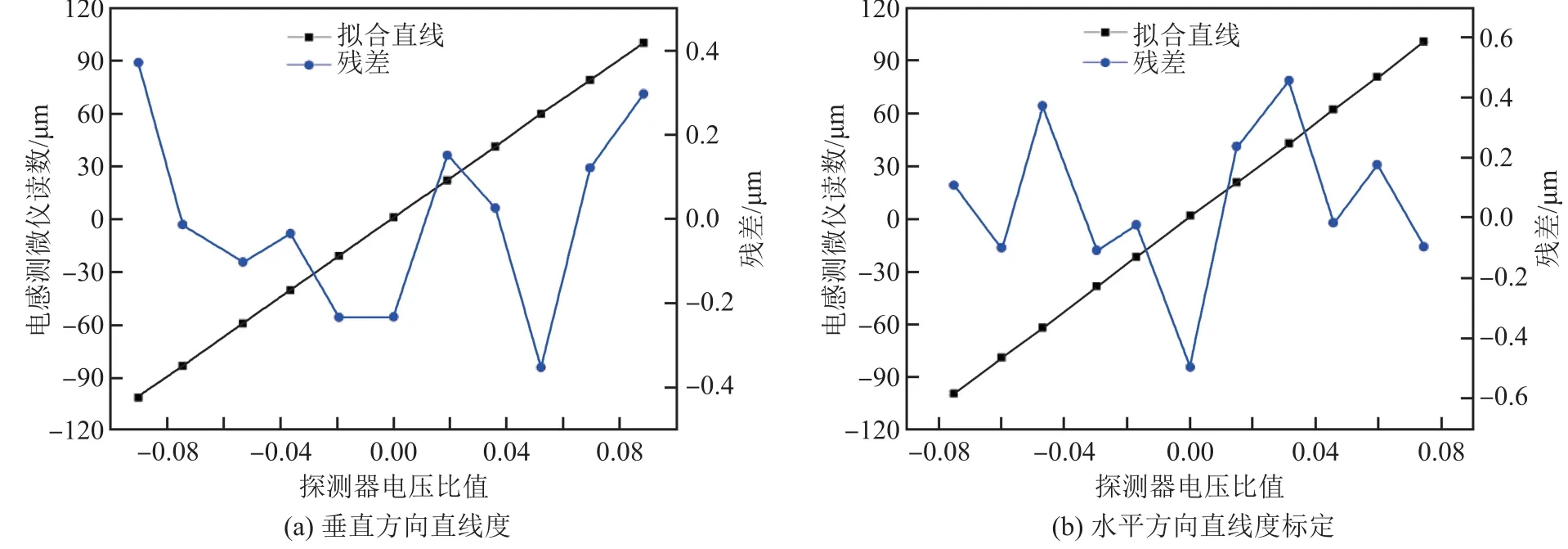
图8 测直线度误差四象限灵敏度标定结果图
根据标定结果可知,标定残差均在±1 μm 以内,四象限光电探测器的灵敏度和输入光强有关,为保证其在整个运动行程内测量准确度可靠,必须在全行程范围内定点进行四象限的灵敏度标定。以100 mm 为间隔进行全行程500 mm 内的标定,结果如表1 所示。
读到这儿,您或许真的会笑了。说你广雨辰这家伙也太可笑了,你不就是在哈尔滨市第一医院呼吸科住院认识了蒋利学吗?就住了那么几天院,你能了解人家多少?还去想那些压根儿没影儿的事儿,纯粹是你脑子进水了。
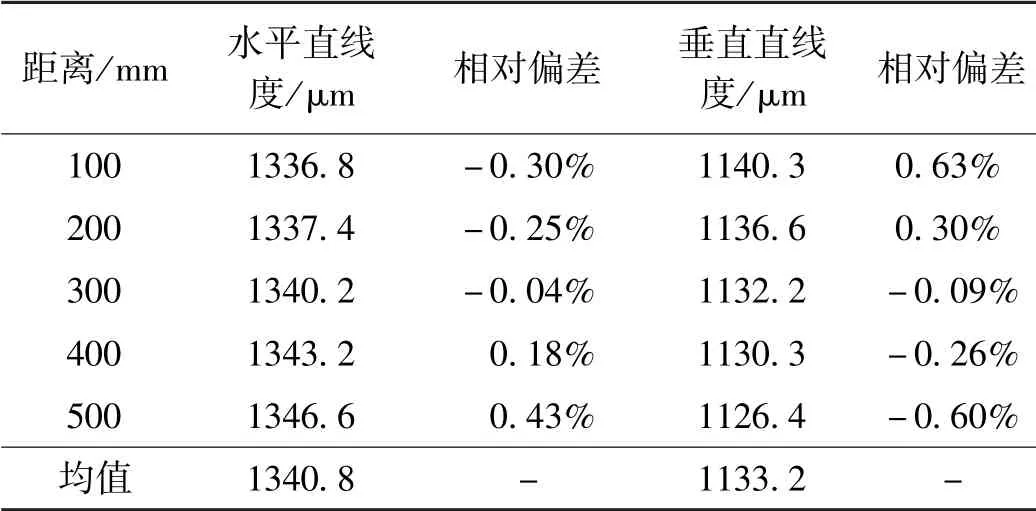
表1 全行程内探测器一灵敏度标定结果
根据表1 的标定结果可知,在距激光发射端不同位置时,灵敏度的标定结果略有不同,各位置处的灵敏度与灵敏度均值之间的相对偏差均在±0.65%以内,因此取灵敏度均值作为探测器一的测量灵敏度使用。
2.2 偏摆角、俯仰角标定
采用光电自准直仪(型号为AutoMAT5000U,分辨力0.01″)与系统二维角度调整架相结合,对测量偏摆角、俯仰角的探测器二进行灵敏度标定。将光电自准直仪配套的反射镜与感测端固定相连,调节系统的角度调整机构使感测端产生偏摆、俯仰方向的转动,调节范围为±100″,调整架单次调节量为20″,同时记录四象限光电探测器的电压比值和光电自准直仪的读数,标定实验现场如图9 所示,标定结果如图10 所示。

图9 角度标定实验现场图
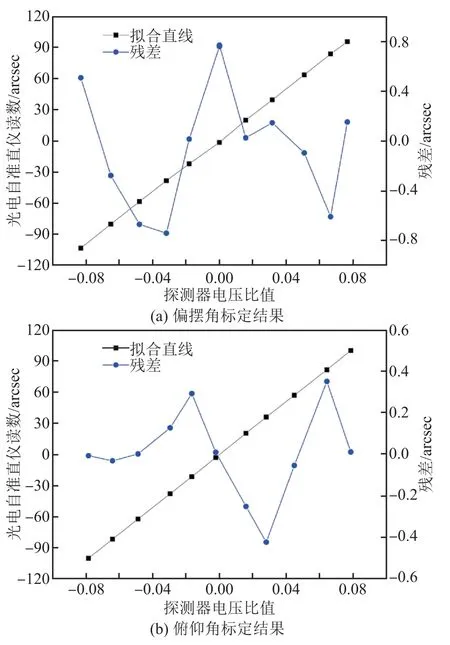
图10 测角度误差四象限灵敏度标定结果图
由标定结果可知,标定残差均在± 1″以内。以100 mm作为间隔进行全行程500 mm 内的标定,结果如表2 所示。
根据表2 的标定结果可知,各位置处的灵敏度与灵敏度均值之间的相对偏差均在±0.6%以内,因此,取灵敏度均值作为探测器二的测量灵敏度使用。

表2 全行程内探测器二灵敏度标定结果
3 滚转角误差补偿修正
将感测端与水平仪结合并移至实验台标记近端,将系统测量滚转角误差调零的同时将水平仪清零,之后将感测端与水平仪移动至实验台标记远端,根据式(8)计算得出光束不平行度θ0,然后将感测端与水平仪向实验台标记近端移动,每隔100 mm 记录一次数据,将各位置计算所得θ0取平均值处理。双光束校准实验现场如图11 所示,标定结果如图12 所示。

图11 双光束校准实验现场图

图12 光束校准标定结果
由标定结果可知,标定残差在±0.8″以内。校准实验求得θ0=0.6″,将式(8)计算得到的滚转角误差影响值通过软件补偿到滚转角测量值中,完成滚转角误差补偿修正。
4 系统准确度比对实验
在完成五自由度运动误差测量系统的标定和补偿后,对整套系统进行准确度比对实验,验证系统的测量准确度是否满足使用需求。
4.1 导轨直线度测量准确度比对
直线度准确度比对试验采用Jim Bryan 提出的直线度测量的布莱恩原则,即当用于测量直线度误差的感测轴与被测轴线不同轴时,会由于角度变化而对直线度测量值产生直接影响,因此需在直线度测量中对此影响值进行补偿。垂直方向直线度准确度比对测量原理如图13 所示。
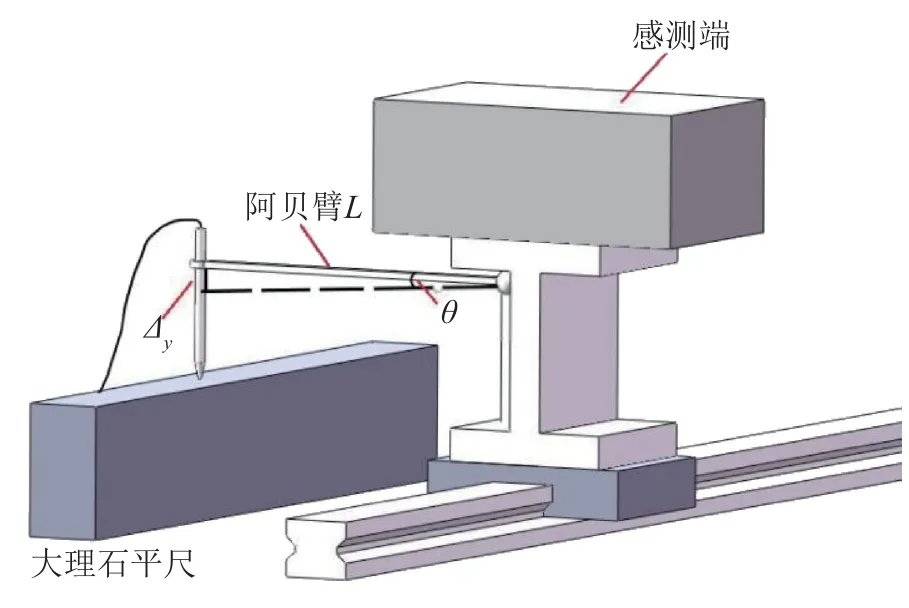
图13 垂直向直线度准确度比对测量原理图
在垂直方向直线度准确度比对实验中,当线性平台存在滚转角误差θ时,阿贝臂L的存在会对电感测微仪的示数产生影响,该阿贝误差为

在水平方向直线度准确度比对实验中,线性平台的角度误差对于电感测微仪探针的影响不敏感,因此可直接取电感测微仪读数作为水平直线度测量标准值。
对测量直线度误差进行补偿后,直线度准确度比对结果如图14 所示。比对结果显示,在全行程内,系统所测水平、垂直方向直线度准确度比对残差分别在±0.7 μm 及±0.8 μm 范围内。
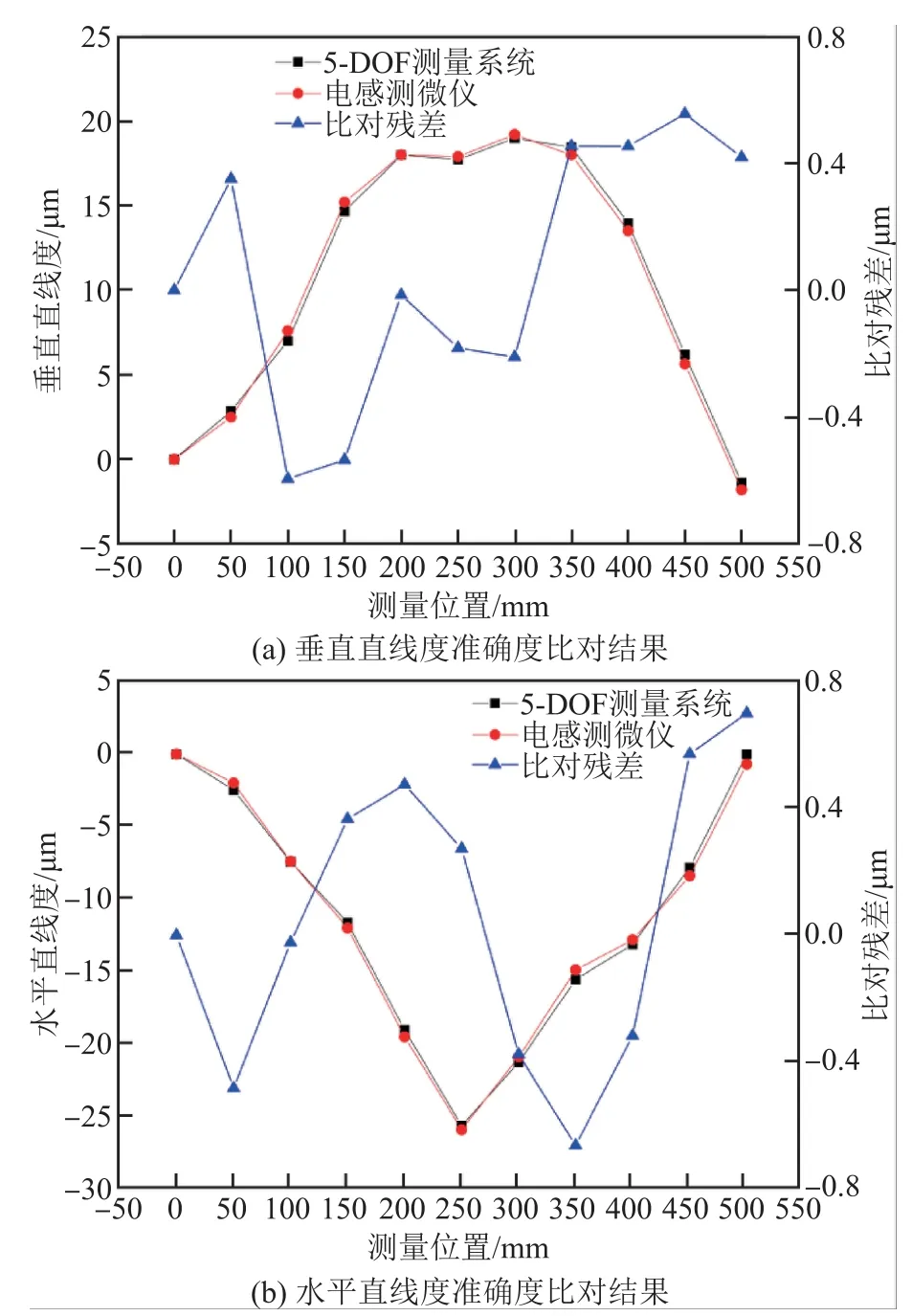
图14 直线度准确度比对结果图
4.2 偏摆角俯仰角准确度比对
将光电自准直仪的靶镜与感测端固定连接,将感测端从实验标记近端开始移动,每隔50 mm 进行数据记录比对,全行程为500 mm,角度误差准确度比对结果如图15 所示。由比对结果可知,在测量行程内,偏摆角和俯仰角准确度比对残差均在±0.8″范围内。
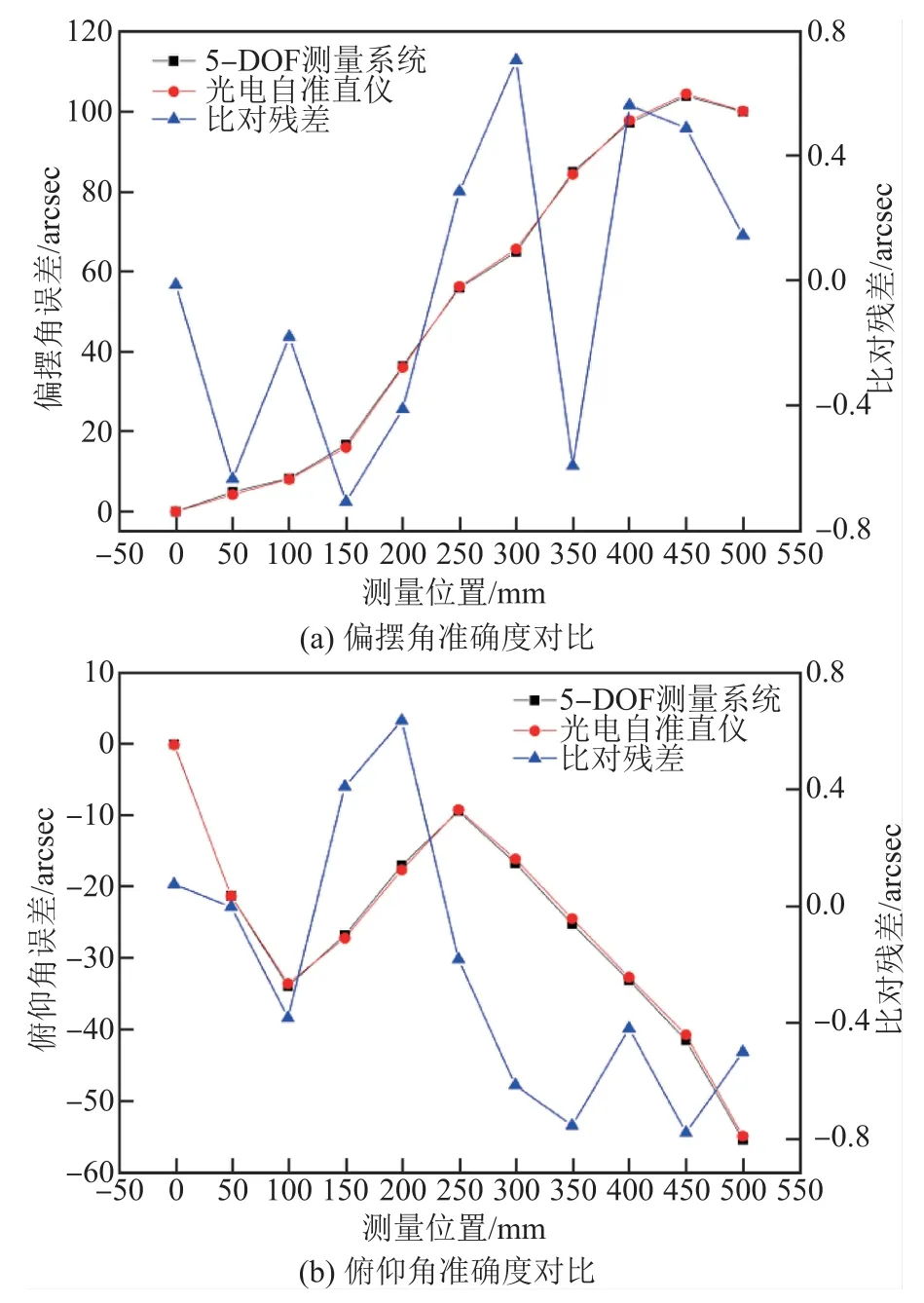
图15 偏摆、俯仰准确度比对结果图
4.3 滚转角准确度比对
将水平仪固定在测量系统的感测端上,将感测端从近端开始移动,每隔50 mm 进行数据记录比对,行程为500 mm,滚转角准确度比对结果如图16 所示。

图16 滚转角准确度比对结果图
比对结果显示:全行程内滚转角准确度比对残差在±1.5″范围内。
5 结论
基于双准直光束设计了一套五自由度运动误差同步测量系统,进行了系统直线度、偏摆角和俯仰角误差测量核心器件参数的自标定,针对双光束难以调平的问题,利用水平仪对系统双光束进行补偿修正。与商用精密测量仪器的准确度比对测试结果表明,该五自由度运动误差测量系统500 mm 范围内直线度、偏摆俯仰角和滚转角误差的准确度分别为0.8 μm,0.8″和1.5″,可应用于机床几何误差快速测量,为机床几何误差测量研究提供了技术借鉴。
