基于新型磁阻式旋转变压器解码问题研究
2021-07-23刘继磊高志民
刘继磊,杨 毅,高志民
(中国船舶集团有限公司第七○四研究所,上海 200031)
0 引 言
新型磁阻式旋转变压器是一种利用转子凸极效应,产生感应电势的高精度角位置传感电机。它具有结构简单、安装方便、制造成本低和精度高等特性,能够较好地提升伺服系统工作的稳定性,适合极端条件下的工作环境[1],作为电机角度控制用传感器在混合动力汽车和电动汽车领域有很大的发展趋势。然而,这种信号电机输出的是包含转子位置信息的模拟量信号,不能直接应用于数字化交流伺服系统中[2]。为了适应于现在普遍采用的微机处理控制系统,必须经过模数转换及运算后得到相应的位置数字信号。目前,针对新型磁阻式旋转变压器的解码问题,主要采用以下两种方案:一是设计一种旋转变压器/数字转换器(简称RDC)电路进行解码;二是采用专门用于解码的进口芯片及其附件实现解码。应用前者设计解码的电子元件电路繁杂,当给元器件通电后,彼此间会产生一定的电磁干扰,这会导致解码的准确性和稳定性降低[3];后者的专用解码芯片往往来自于国外厂商,价格昂贵,从而导致成本较高,不利于形成产品的批量化产能。为了满足数字化交流伺服系统位置反馈的性能需求,针对新型磁阻式旋转变压器的解码问题,本文研究了一种新的解码理论,经过实际的测试验证,其解码准确性较高、稳定性较好,具有一定的实用价值。
1 新型磁阻式旋转变压器的工作原理
新型磁阻式旋转变压器的工作原理是借助转子磁极所产生的凸极效应,当激磁绕组和两相输出信号绕组之间存在的耦合关系,转子位置发生变化导致互感变化,进而在两相输出信号绕组中会感应出电动势,并且该感应电动势包含有转子的位置信息[1]。图1为新型磁阻式旋转变压器的工作原理和输出电动势示意图。

图1 新型磁阻式旋转变压器的工作原理和输出电动势示意图
2 解码原理及具体过程
根据上述新型磁阻式旋转变压器的工作原理,结合实际需要,提出以下解码方案,如图2所示。

图2 新型磁阻式旋转变压器解码原理图
由图2可知,首先对新型磁阻式旋转变压器的两相输出电压模拟量信号经过两个环节的调理电路进行信号调理,主要包括:滤波处理,信号放大处理(放大至DSP中A/D转换允许的电压区间)等;然后再送入DSP中依次经过A/D转换电路处理、数字滤波环节处理、差分算法处理、所属区间判别处理、绝对值求取处理、解码运算环节处理、解码纠正环节处理以及解码输出环节处理等,最后输出旋转的角度值[3]。
本文采用高速数字信号微处理器DSP进行信号处理,响应快,即时性好,只要修改DSP芯片内部程序参数就能实现所需要求,大大提高了电路设计的柔性。
2.1 正余弦两相输出信号
新型磁阻式旋转变压器两相输出:
es=sinα
ec=cosα
其中,es滞后ec电角度90°,其波形如图3所示。系列1为es=sinα,系列2为ec=cosα。
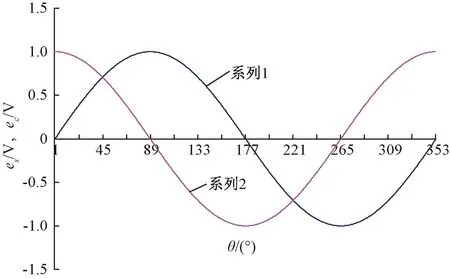
图3 新型磁阻式旋转变压器两相输出波形图
2.2 对两相输出信号求取绝对值


图4 两相输出信号取绝对值后的波形图
2.3 区间判别
做辅助函数u=|ec|-|es|=|cosα|-|sinα|,其中u、sinα、cosα之间的波形如图5所示。系列1为es=sinα,系列2为ec=cosα,系列3为u=|ec|-|es|=|cosα|-|sinα|。

图5 两相输出及其辅助函数波形图
由图5可以看出,在一个360°电气角度范围内,可由u,es和ec正负号来进行区间判别。u,es和ec正负号与区间的对应关系如表1所示。

表1 u,es和ec正负号与区间的对应关系
2.4 区间与角度及解码数字间的关系
DSP依次经过对两相输出信号差分算法处理、绝对值求取处理,以及所属区间判断后,可得区间与角度及解码数字间的对应关系,如表2所示。
2.5 D值的确定
因为各区间自0点开始终到绝对值交点的曲线是对称的,所以仅需采用算法处理区间1,其余区间2~8可转化至区间1。当360°的电气角度对应解码数字4 096个时,各区间对应512个解码数字,即自0点开始终到正余弦绝对值交点,采样值的数值对应512个解码数字。向DSP内存按顺序依次存储512个解码数字,然后将所采样到正余弦绝对值的数据转换为其所在单元的存储地址,取内存值D值,最后采用上述表2中区间对应计算公式进行计算,就可获得当前区间所对应的绝对位置[3]。
3 测试及误差分析
实验测试时,3对极新型磁阻式旋转变压器(简称“新型磁阻旋变”)分别与美国AD公司生产的专用解码芯片AD2S83,日本多摩川公司生产的专用解码芯片AU6802和本文研制的解码电路(简称LJL611)及标准测试仪连接进行实验测试。按照5°机械角对应“新型磁阻旋变”15°电角度,360°电角度对应4 096个字进行实验记录。分别用LJL611,AD2S83,AU6802测量出新型磁阻式旋变输出编码数值,机械3圈,可得部分测试数据如表3所示。由表3数据可以看出,和AD2S83,AU6802解码芯片相比,研制的解码电路编码数值比较稳定,重复性好,可靠性高。将LJL611,AD2S83,AU6802调整零点后重新测量数值,计算出机械角对应的解码理论值,求出解码理论值与实际测量值的误差,进行误差分析,结果如图6所示。图6中:系列1为AD2S83,系列2为AU6802,系列3为LJL611,系列4为标准仪器测试仪。

表3 部分测试数据

图6 新型磁阻式旋转变压器实际解码值与理论值误差分析曲线
由图6可以看出,AD2S83,AU6802和LJL611,这三者解码数值误差趋势一致,解码数值误差和新型磁阻式旋变自身误差趋势一致,本文的解码方案误差只大几个字。据图6,一机械圆周内,解码数值误差最小为-28,解码数值误差最大为46,则一个机械圆周内的解码数值误差:[46-(-28)]÷2=37字;一个机械圆周内,旋变三个电气周期,因此电气数值误差:37÷3=12.3字;将数值误差换算为角度:360°×(12.3÷4 096)=1.08°=65′,解码电路电气误差为±65′(含新型磁阻旋转变压器固有电气误差30′),完全可以满足一般数字化交流伺服系统的控制要求。
4 结 语
经过硬件原理设计、控制软件编制和实验测试,本文提出的解码理论解码准确性较高、稳定性较好,能够满足数字化交流伺服系统位置反馈的性能要求,具有一定的实用价值。
