基于地面三维激光扫描的三峡库区危岩体监测
2021-07-23褚宏亮邢顾莲李昆仲王国利段奇三
褚宏亮,邢顾莲,李昆仲,王国利,段奇三
(1.中国地质环境监测院(自然资源部地质灾害防治技术指导中心),北京 100081;2.西藏自治区地质环境监测总站,西藏 拉萨 850000;3.北京建筑大学测绘与城市空间信息学院,北京 102616;4.北京地景科技有限公司,北京 101400)
长江三峡库区是我国地质灾害的多发区和重灾区[1],危岩体崩滑可能造成的涌浪灾害严重威胁着长江河道的航运安全,是崩塌、滑坡灾害监测预警的重点。目前,崩塌、滑坡灾害监测可分为“点”式(裂缝伸缩计、分布光纤法、GPS、全站仪)和“面”式(GBSAR、InSAR 技术、激光扫描测量)两类,而地面三维激光扫描(terrestrial laser scanning,TLS)作为“面”式监测手段具有反应迅速、变化敏感、自动化等特点,越来越多地被应用于地质灾害监测中,并取得了良好的效果[2−5]。Hobbs等[6]将TLS技术应用于海岸侵蚀崩塌监测,验证了该技术在崩塌监测中的可行性;董秀军等[7]将TLS技术应用于无植被覆盖的高陡边坡地质调查,发掘了该技术在地质调查中的应用前景;Abellan等[8]将该技术应用于西班牙某岩体崩塌的监测中,得到了毫米级程度的形变值,验证了高精度监测的可行性;徐进军等[2]应用TLS技术在室内外开展滑坡形变监测验证,发现该技术能达到很好的精度,在滑坡监测方面应用前景广阔;谢谟文等[9]对TLS监测方法、监测精度、滤波处理方法等进行分析,并探讨了从无植被岩体的变形监测到有较少植被的滑坡体的变形监测的可能性,扩展了TLS技术在滑坡监测中的适用性。裴东东等[10]探索了利用车载激光扫描技术进行滑坡监测的可行性。
TLS技术在地质灾害监测中的应用逐渐兴起,但针对库区高陡危岩崩塌灾害监测的应用较少。本文以三峡库区巫山箭穿洞危岩体为例,对其危岩体表面进行3期重复扫描,以第1期数据作为基准数据,利用最近点迭代(iterative closest point,ICP)算法配准,通过拟合三次曲面及内插数字表面模型来分析形变量,探索了该技术用于库区高陡危岩体三维监测形变的可能性,为基于该技术的隐患特征突出的滑坡和崩塌形变监测提供了思路。
1 研究区概况
重庆巫山箭穿洞危岩体位于长江左岸(图1),地处神女峰背斜核部。调查人员早在2012年就发现箭穿洞危岩下方基座已经被压得支离破碎,严重威胁三峡航道和沿岸人民生命财产安全[11]。箭穿洞危岩体后缘高程为278.0~305.0 m,基座高程为155.0 m,高差为123.0~150.0 m,平均高差135.0 m。危岩平均横宽50.0 m,平均长55.0 m,体积约35.75×104m3。
经实地勘查,箭穿洞危岩体北西、南东两侧和北东后缘边界裂缝清晰,已全部贯通,仅靠底部泥质条带状灰岩支撑。2012年10月—2014年6月,重庆市地质灾害防治工程勘查设计院对危岩体进行了沉降及位移监测,发现2年间危岩体最大沉降量达20.0 mm,监测点水平位移累计最大达30.9 mm[11]。为掌握危岩体在不同时期的表面绝对几何形态变化情况,2017—2018年,本文对研究区开展了3期TLS形变监测,并分析库区周期性蓄水对危岩体形变的影响。
2 三维激光危岩体监测方法
目前用于危岩体三维激光扫描监测的关键技术主要包含两个方面:一是对齐基准方法,二是变化对比分析方法。对齐基准方法直接关系到整体变化趋势分析的精度,变化对比分析方法则对局部变化精度有重要影响。
2.1 数据基准
在数据基准选择方面,一种方法是在危岩体周边稳定区域建立控制网,即GPS控制网或稳定局部坐标系控制网[12]。在信号稳定的开阔地,GPS作为基准建立监测控制网能稳定实现监测区域基准对齐,然而一般危岩区域都是野外区域,有山体或者水体影响,GPS信号受干扰比较强烈,难以建立稳定网络[2−3];另一类方法则是通过地物对齐,找到其相对稳定区域作为基准,采用多点对齐模式,监测其相对变化[3]。
由于箭穿洞现场GPS信号受山体及江面影响严重,GPS数据存在现场采集困难、解算精度差等问题,工作中采用坐标基准为局部坐标系。具体坐标系以扫描测站为中心,天顶竖直向上为Z方向,稳定区域与危岩区域沿垂直江面进深约250 m,高差约400 m,具体如图2所示。
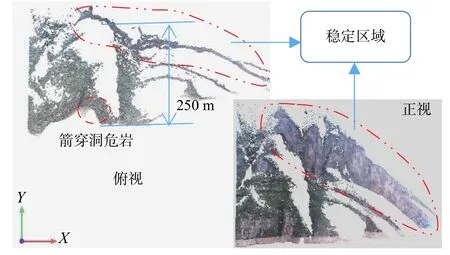
图2 监测基准设定Fig.2 Setting of the monitoring datum
以初次扫描危岩体数据建立的坐标系为基准,后期数据主要以初次扫描周边稳定岩体区域岩体数据为参照,对稳定区域点云ICP配准。
2.2 点云变化对比分析
在点云数据变化分析方面,目前研究方法有最近点法、点到模型的对比法。在危岩计算中,由于扫描位置及扫描密度无法做到完全一致,用点到点方法无法反映真实岩体变化[13]。点到面的变化需要计算准确的局部信息。在激光点云数据三维变化分析方法方面,徐进军等[2]采用一种重心法计算不同分割区域的重心,并对重心变化进行对比;该方法需要对目标边界进行交互选择确定,在实际操作有难度且精度难以保证。方良斌等[14]提出一种移动平均法,通过沿节理方向移动拟合局部平面计算危岩滑坡偏移量。这些方法都能通过法向和局部表面关系计算危岩表面相对变化。
本文针对箭穿洞进行三维激光扫描,限于观测条件及视角等因素,观测实际点云密度较低,属于稀疏点云。针对数据稀疏目标点云变化,采用点到面分析方法可以准确表达岩石表面的变化状况。分析危岩体点云变化时,遍历待分析点云,搜索以当前点P为中心,半径为R的空间球所包含的基准数据的TIN面片集进行变形分析(图3)。设定当前点坐标为XP,当前三角形面片中心为Xi,法向为Ni,则当前点的三维偏差(Vi)的计算公式如下:

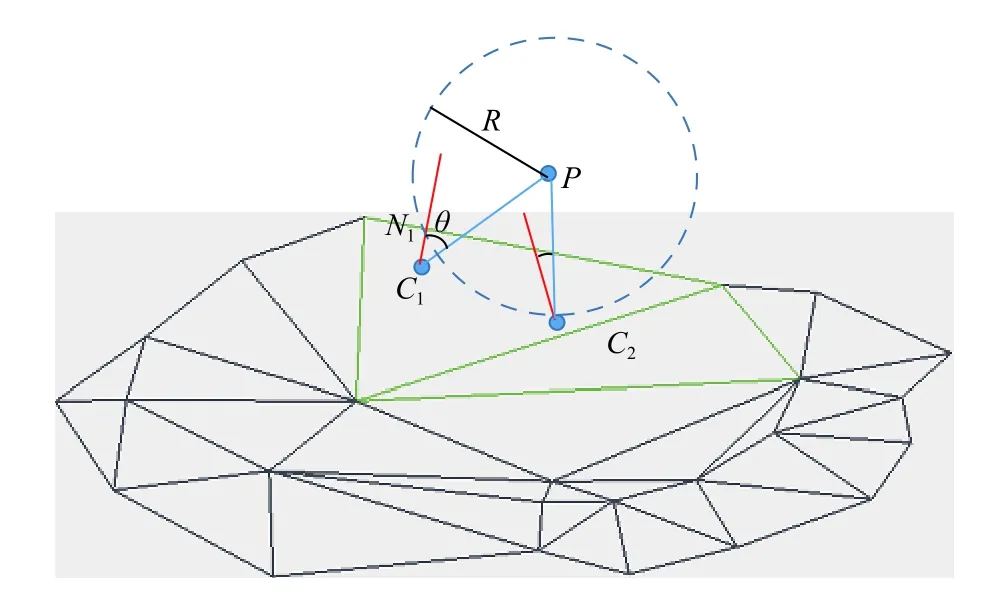
图3 点-面危岩体激光点云变化分析Fig.3 Analysis of laser point cloud changes of dangerous rock mass with the point-face method
为了减少边界或者噪声对分析结果的影响,需要对变化角度进行限定(图3):假设θ为当前点P与当前三角形面片中心Ci连线NP与面片法向Ni的夹角,则θ计算公式如下:
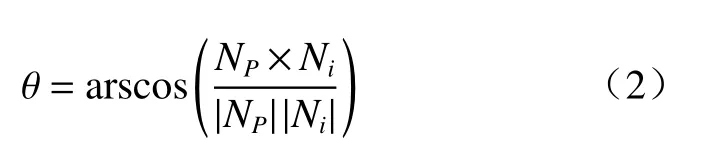
角度阈值设为θth,当θ>θth后,认为点超出变化分析范围,应避免将边界噪声点及植被等目标点加入变化分析,以提高结果可靠性。
3 箭穿洞危岩体监测实验
3.1 危岩体数据采集
箭穿洞区域现场江面宽度约700 m左右,两侧崖壁陡峭,采集条件恶劣,在江对面有局部区域可布设扫描站。目标周边受山体及库区水域影响,GPS信号差,现场三维扫描采用局部坐标基准。依据现场踏勘情况,采用箭穿洞后方稳定岩体作为基准(图2)。依据扫描距离(500~1 000 m)结合现有设备,采用Riegl VZ1000三维激光扫描仪获取三维扫描数据,仪器主要技术指标见表1。
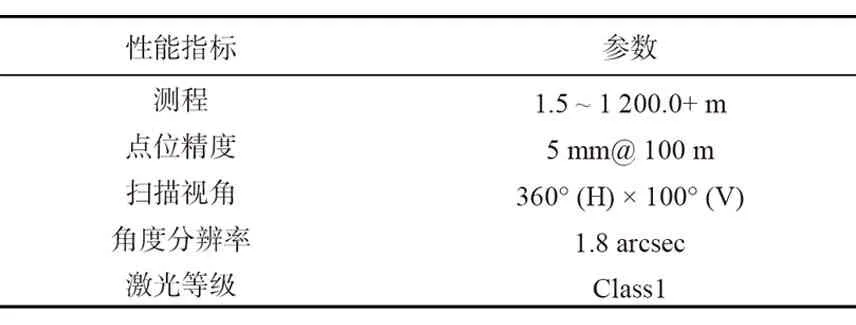
表1 Riegl VZ-1000激光扫描仪主要技术指标Table 1 Main technical indexes of Riegl VZ-1000
为保证数据的拼接稳定,在箭穿洞区域布置高反光片标志,用于多期点云数据初始定向。图4为第1期(2017年9月1日)三维激光扫描数据采集现场及激光反射片标志。

图4 箭穿洞扫描测站及反射片Fig.4 Jianchuandong scanning station and reflector
使用激光扫描仪扫描时,设置扫描分辨率为10 mm@100 m,结合现场扫描距离及角度等因素,实测岩体表面平均点间距约为0.08 m,单测站扫描耗时约3 h。第1期扫描结果见图5。
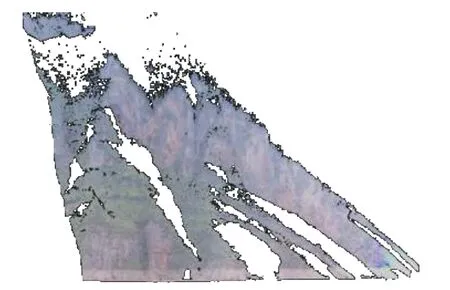
图5 箭穿洞扫描点云Fig.5 Point cloud of Jianchuandong
采集周期方面,为了观测三峡库区放水与蓄水对危岩体的影响,在数据采集时段上,初始采集时间选择在9月初,水位线一般达到最低,蓄水期则选择观测时段在1月份。具体3期数据采集时间与结果见图6。
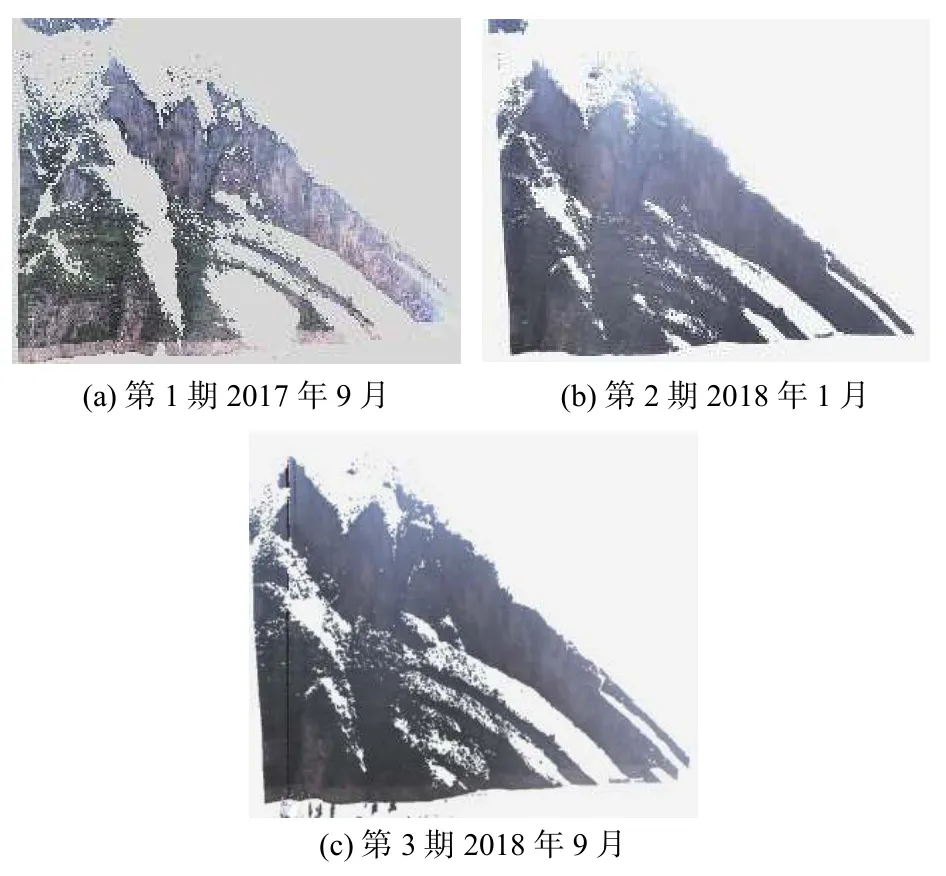
图6 箭穿洞3期数据采集结果(单期平均点距为0.08 m)Fig.6 Three periods point cloud of Jianchuandong (average point distance of 0.08 m)
3期数据采集时水位相比,第2期比第1期高约21.0 m,第3期比第1期高约1.0 m。
3.2 数据点云预处理
点云数据预处理主要包含点云噪声滤除、数据配准两部分内容。点云数据中包含远距离不同入射角度引起的数据噪声及植被影响,由于不同时段植被存在差异,这些数据对点云的配准及建模、对比分析等结果都有影响。植被反射强度相对山体反射强度偏低,依据反射强度信息统计点区间如图7(a)所示。本文利用激光点云反射强度阈值(Ith)进行植被滤除,对图7(b)中的原始危岩体点云进行植被滤除,结果如图7(c)所示。
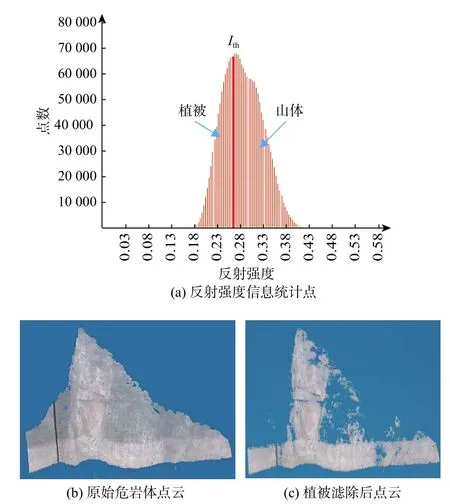
图7 点云植被滤除(Ith= 0.29,测区点数202万,植被点93万)Fig.7 Filtering of vegetation point cloud (Ith = 0.29,test point cloud is 2.02 million,vegetation point is 0.93 million)
由于不同采集时段的环境差异,植被与岩体强度阈值Ith存在变化。在算法滤除基础上,通过交互删除残留植被点,得到危岩体点云。
点云数据配准主要以第1期(2017年9月)为基准,将后面2期通过反光片进行初始对齐,在此基础上,以选定稳定区点云为基准进行最近点迭代配准(ICP),配准结果见图8。

图8 点云数据配准基准及误差分布(计算区间:±0.1 m;1-2配准:平均偏差0.063 m,标准偏差±0.024 m;1-3配准:平均偏差:0.036,标准偏差:±0.028 m)Fig.8 Registration reference and error distribution of point cloud data (Calculation region of ± 0.1m.Registration 1-2 with average deviation of 0.063 m,standard deviation of ± 0.024 m.Registration 1-3 with average deviation of 0.036 m,and standard deviation of ± 0.028 m)
配准后对整体数据进行三维比对分析,可知参与迭代配准的点云配准标准差均优于0.03 m,与相应范围的点云建模精度相符,配准结果实现了各期数据基准对齐。为检核3期点云与基准对齐情况,将3期点云叠加剖切结果,得到图9。
由图9可知三期数据水平断面数据无分层现象,各期点云底部水位线对齐,点云在水平及竖直方向实现了基准对齐。
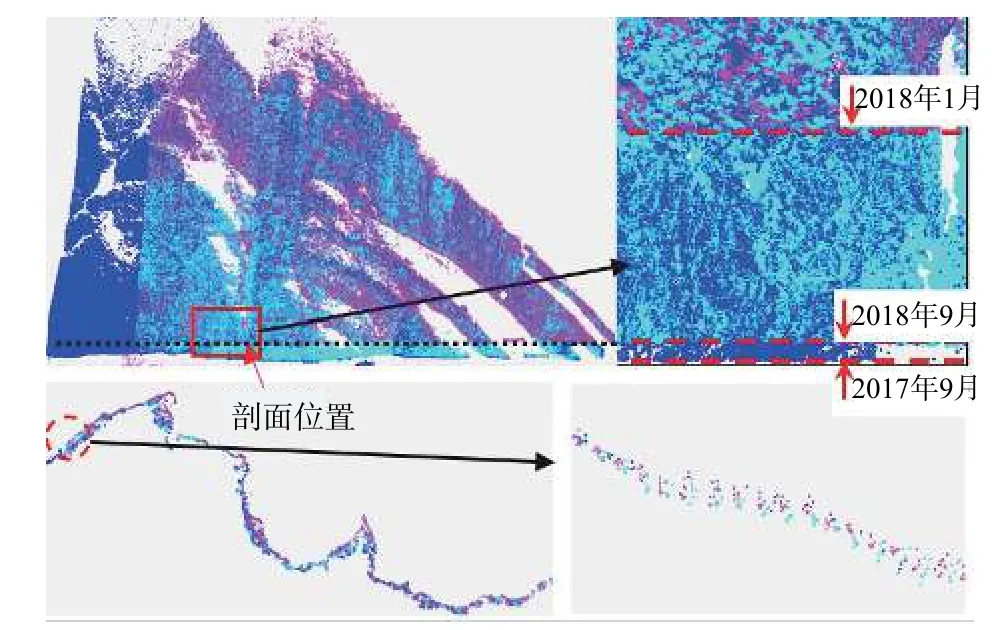
图9 三期点云数据叠加分析Fig.9 Overlay analysis for 3 periods of point cloud
3.3 数据精度分析
点云数据及其处理精度对危岩体变化分析非常重要,决定了本文所用分析方法的可靠性。数据精度主要包含仪器精度、数据测量精度及数据配准精度。
在仪器精度方面,本文选用Riegl VZ1000扫描仪,设备在100.0 m处,设备厂商标称点位重复测量精度指标为±0.005 m。徐寿志等[15]对该设备的标称点位测量精度进行了验证,结果满足标称精度(测试最大距离192.0 m)。扫描仪点位精度与扫描目标反射率、扫描密度及扫描距离也存在密切关系[16],本文中岩体反射率一般位于0.6~0.8区间,反射条件较好(图7中山体反射率明显高于植被)。一般远程扫描仪(800~1 000 m)的典型精度约为±0.015 m[3],Mat Zam等[16]以GLS2000扫描仪为例验证了高密度坡体扫描点云(扫描距离约200.0 m)精度为±0.013 m;Oppikofer 等[17]采用点到拟合平面方法评定滑坡监测扫描点精度,400.0 m处扫描点位中误差约为±0.0165 m。以第1期箭穿洞岩体构建TIN模型局部平面为基准评定点云精度,结果如图10所示。点位平均正偏差为﹢0.012 m,负偏差为−0.013 m,标准偏差±0.017 m,可知点云精度与上述文献中的精度一致(本文点云扫描距离约500 ~ 700 m),可分析超过±0.017 m区间的岩体变化。
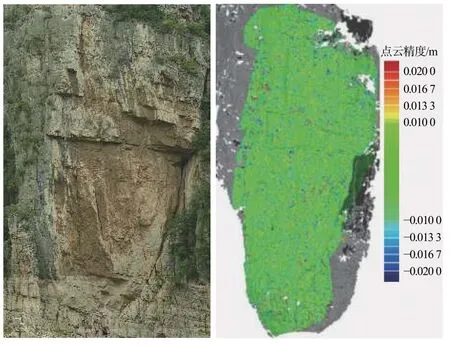
图10 点云精度分析结果Fig.10 Accuracy analysis of point cloud
在配准方面,ICP配准方法误差主要取决于两点因素:扫描点间距及扫描测站差异。本文扫描监测位置相对固定,每期监测扫描点设置密度都相同(约0.08 m),因此不同时期数据配准中误差(图8中,1-2:±0.024 m,1-3: ±0.028 m)包含了点云误差及两期对象变化在内,与文献[17]中序列观测点云配准误差(±0.027 m)接近。
3.4 箭穿洞危岩变化分析
由于箭穿洞危岩体扫描距离远,点云密度稀,本文选用点到面的方式计算危岩体变化。具体方法是:将3期点云坐标配准到同一基准坐标系,选择第1期(2017年9月)箭穿洞点云数据,截取危岩体部分处理并构建TIN模型(图11)。
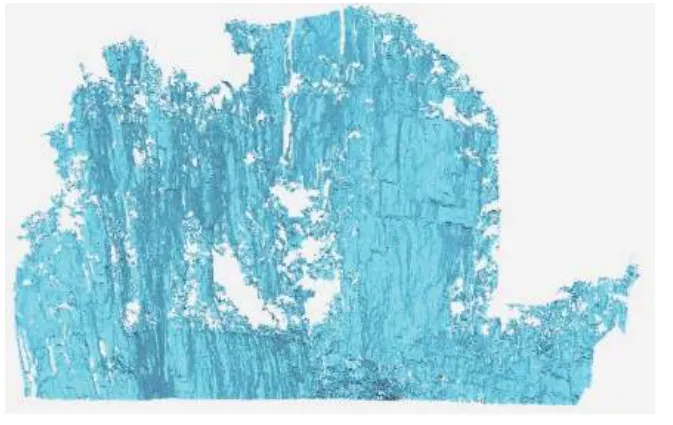
图11 箭穿洞危岩构建基准TIN模型(第1期,建网步长80 mm,共180万面片)Fig.11 Reference TIN model of dangerous rock mass of Jianchuandong (Period 1,step of TIN model of 80 mm,1.8 million pieces in total)
以上述TIN模型为基准,将其余2期相应危岩体点云进行三维偏差计算,分析危岩不同时段和条件下的变化,包含整体变化分析与局部变化分析。
(1)整体变形分析
本文选择偏差分析空间球半径(R)为0.08 m(平均点距),角度阈值(θ)为 45°,将第2与第3期进行偏差计算,结果见图12。
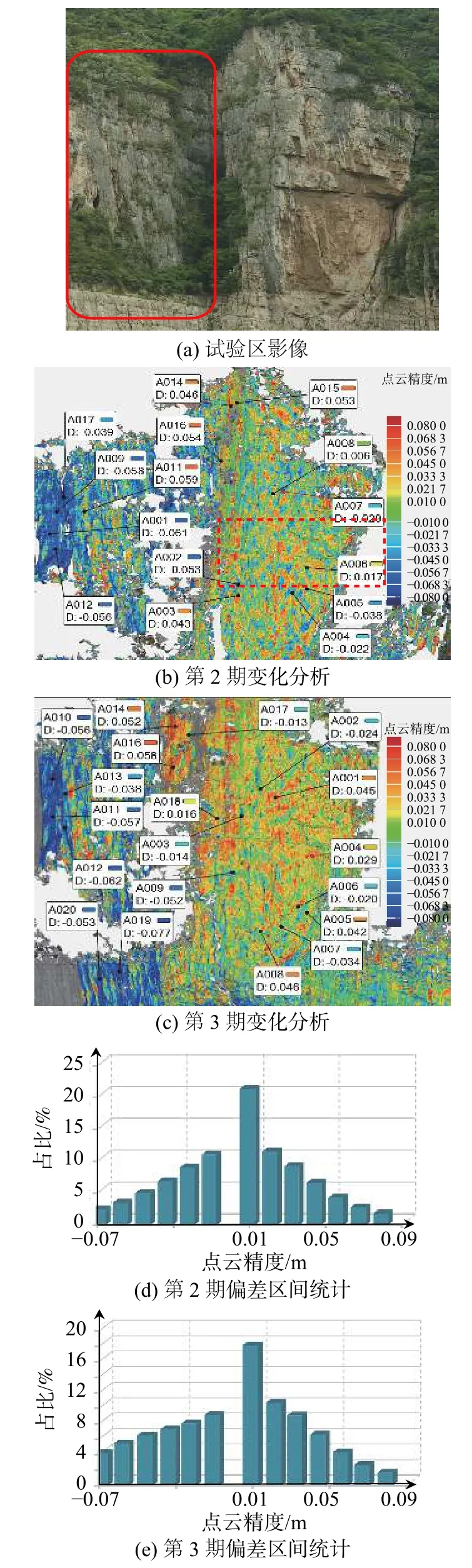
图12 危岩体变化分析统计Fig.12 Change analysis and statistics of dangerous rock mass
由图12可知:两期对比结果偏差整体呈正态分布,局部位置存在偏差。其中2-1期对比,平均正负偏差为+0.029/−0.032 m,标准偏差为±0.039 m;3-1期对比,平均正负偏差为+0.030/−0.039 m,标准偏差为± 0.042 m。相比2-1,3-1(图12)相比2017年有整体扩张趋势,左侧危岩体整体相对变化在−0.04~−0.06 m范围内。
针对危岩体变形分析,利用邻域均值的方法能有效减弱单点噪声影响,Abellan等[18]采用基于最近点邻域的方法监测滑坡变化,有效降低噪声点影响,凸显了区域变化。为了减弱噪声对局部变化的影响,本文以采样点区间半径(R)为0.3 m的范围内的变化均值作为采样点测量结果(图12、图13),由典型区域的采样结果可知危岩体局部存在变化。
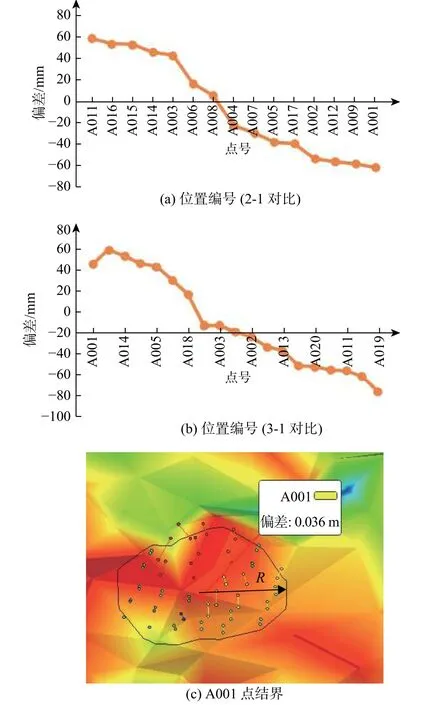
图13 危岩变化典型值测量结果(采样半径为0.3 m)Fig.13 Measurements of typical values of dangerous rock change (R= 0.3 m)
(2)局部变化分析
由于整体变化较为复杂,为了避免周边区域干扰,选择图12中部虚线框内部分进行局部分析,结果如图14所示。
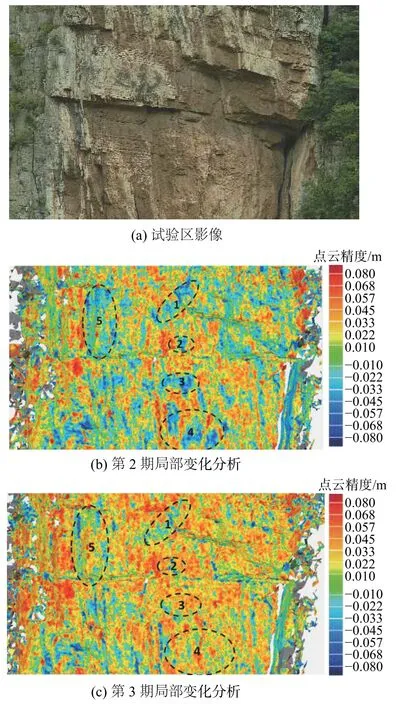
图14 局部区域变化分析(分析区间±0.08 m)Fig.14 Local area change analysis (analysis interval of ±0.08 m)
对图14中5个位置进行典型值测量,测量半径(R)为1.0 m,结果如表2所示。
由表2可知:蓄水期(2-1)与放水期(3-1)相比,位置1、2相比岩体基本无变化,位置3、4、5三处则存在明显的“凹陷”变化趋势,变化约在−0.02~−0.04 m。为了明确蓄水对危岩体影响,压缩统计区间,将变化区间设置为−0.02~0.06 m区间,结果如图15所示。
设置测量半径(R)为0.3 m,针对图15中10处典型位置进行量测,结果如图16所示。
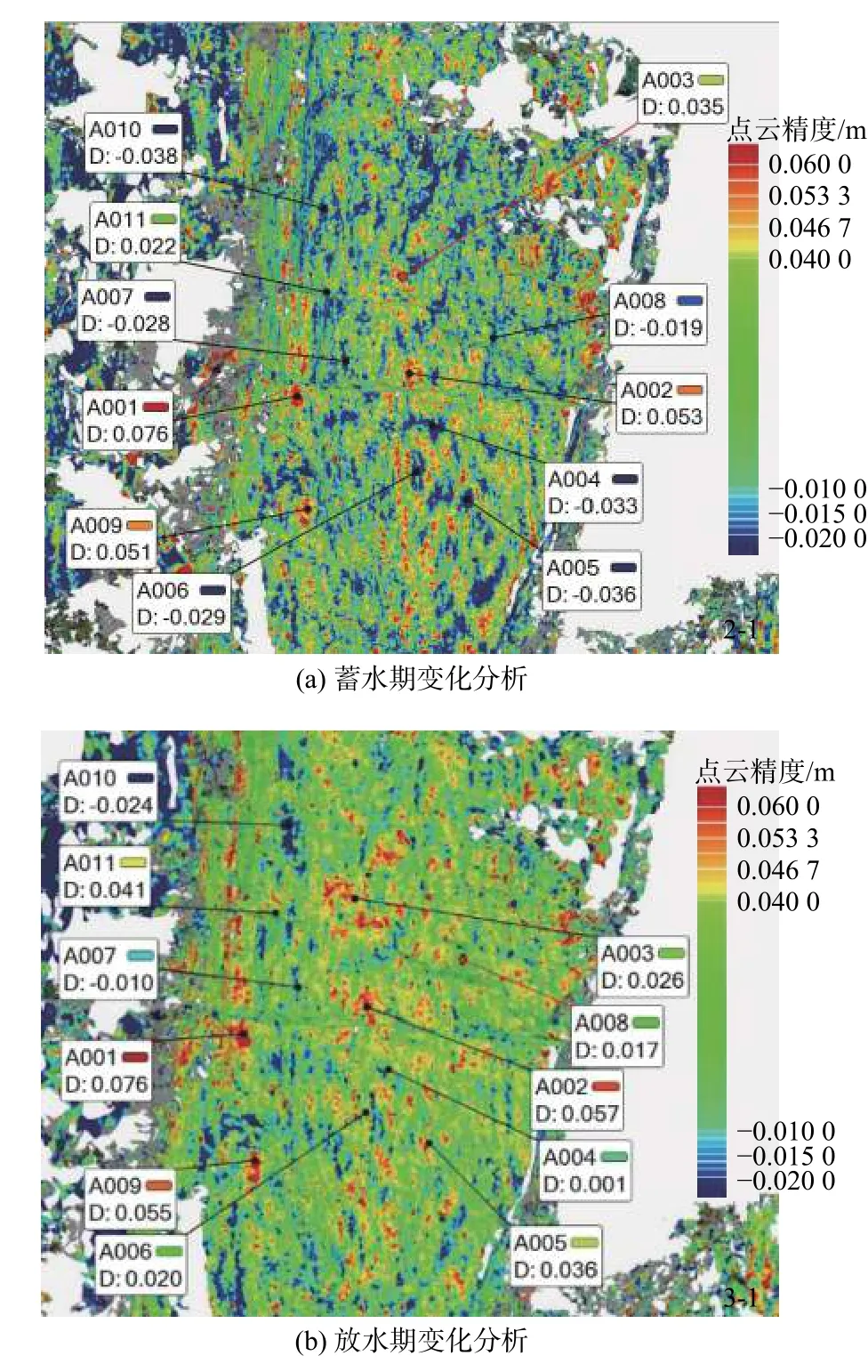
图15 危岩体变化压缩统计区间结果Fig.15 Compression statistical interval results of dangerous rock mass change
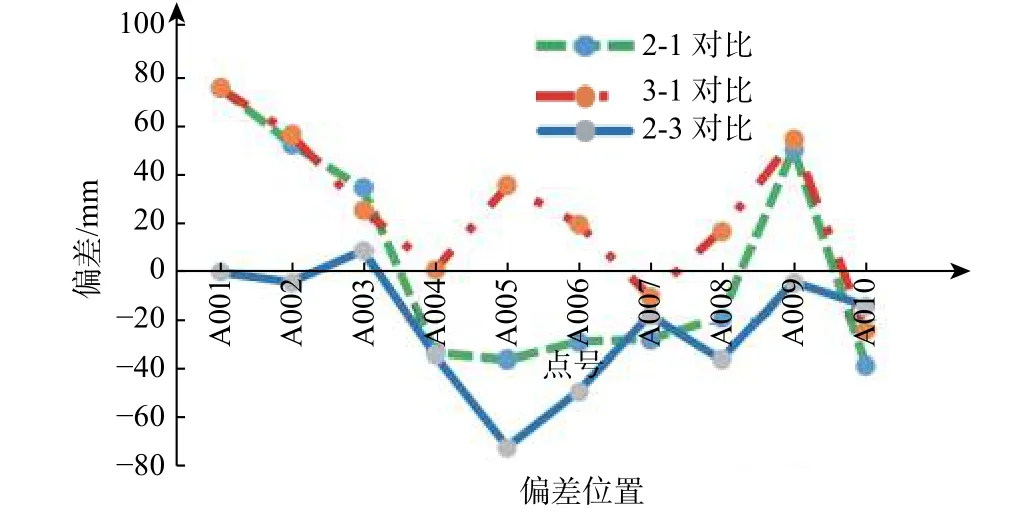
图16 危岩体局部典型位置变化分析Fig.16 Analysis of local typical position changes of dangerous rock mass
针对图16中典型变化值可知,位置A001—A003、A007、A009、A010在2018年2期观测中较为稳定。而局部位置A004、A005、A006、A008位置岩体则存在明显的凹陷变化(2-3对比),变化大约在−0.03~−0.07 m。
综合上述3期观测数据对比情况,箭穿洞危岩体2018年相对2017年左侧岩体背江方向产生约0.05 m的位移,在库区蓄水期(2-1)箭穿洞危岩体基座受江水压力,导致上部危岩体向北倾斜,放水期(3-1)则危岩体产生向江方向位移趋势,说明库区蓄水期对危岩体局部区域有较大影响。
4 结论
(1)地面激光扫描技术可以准确、全面获取箭穿洞危岩体表面点云,并可实现危岩体厘米级形变监测。不同期点云对比精度主要取决于对其基准及分析方法两方面:在对齐基准方面,当野外卫星定位信号差(山体、水体等干扰)时,宜采用观测目标周边其它稳定目标;在变形对比分析方面,为凸显危岩体变化,需要对目标进行分片及植被过滤等处理。另一方面,由于测程较远,点云密度较低,变化分析中采用点到模型局部表面分析更准确,局部区域变化为避免点云噪声影响,宜采用局部区域变化均值分析。
(2)箭穿洞危岩体在观测时段内左侧岩体带(西侧)有背江方向位移;岩体在蓄水时段存在整体背江方向产生位移,变化在−0.03~−0.07 m间。限于观测频率,本文只对比了库区高水位及低水位时段数据,要分析库区蓄水时段危岩体更精细的变化情况,需要适当增加观测频率。
受现场观测条件限制及植被干扰,对于危岩体裂缝等更精细变化监测,可探索多源数据支持下的危岩监测分析,以有效弥补单一数据监测不全面的缺陷。