基于CATIA软件的产品虚拟装配仿真应用
2021-07-23张乐平
王 琛, 张乐平
(南京林业大学家居与工业设计学院,江苏 南京 210037)
产品的装配过程是产品制造过程的末端环节,其目的是将零散的部件安装成完整的产品。在传统的产品制造过程中,实际装配过程容易出现两类问题:一是产品的装配设计出现错误,造成部件无法装配成型;二是产品装配过程规划不合理,造成装配过程繁琐,装配效率低下。这两类问题都直接增加了产品开发的时间和成本。因此,产品虚拟装配仿真是产品开发过程中必不可少的环节。产品虚拟装配仿真有两个作用:①通过对产品结构的动态虚拟装配,展示产品结构中各零件结构尺寸、位置关系和装配关系,使设计者、工程师对产品的结构有直观地认识,指导实际装配操作。②通过合理规划装配序列和装配路径,发现装配过程中的干涉问题,优化装配方案,提高装配效率,减少产品开发的时间和成本。本文将CATIA软件各模块功能结合应用,首先应用CATIA软件对DSG湿式双离合器进行装配建模,而后应用CATIA软件对DSG湿式双离合器进行装配规划。从产品的装配建模和产品的装配规划两个方向,探究基于CATIA软件的产品虚拟装配仿真应用的可行性,以期为CATIA软件在产品虚拟装配仿真中的应用提供指导。
1 虚拟装配仿真技术
虚拟装配是指在虚拟现实环境下仿真装配过程,是虚拟制造的重要组成部分。虑拟装配充分利用了计算机辅助设计技术、计算机辅助制造技术和虚拟现实技术的优点,模拟出虚拟的装配环境,被用于验证装配设计和操作过程的合理性,并可视化地展示装配过程,以便设计者及早发现装配中的问题,对装配设计进行修改。在集成的产品设计开发过程中,虚拟装配仿真技术包含了设计和制造两个方向。设计方向指的是产品的装配建模,就是设计出能进行最佳装配的产品。制造方向指的是产品的装配规划,就是通过合理的装配规划,将零散的部件装配成产品,主要包括装配序列规划和装配路径规划。
1.1 产品的装配建模
产品的装配建模和普通三维建模的区别在于,产品的装配建模是将形式化的面向装配设计技术与计算机辅助产品设计环境结合起来的建模方式。其设计重点是将产品分解为子系统,产生子装配,直至分解成单个零件,对零件三维建模的同时兼顾零件与零件,零件和系统间的装配位置和关系,最终使每个零部件的设计都满足优化装配的需要。
1.2 产品的装配规划
产品的装配规划是将零散的部件装配成产品整体的规划过程,重点考虑产品装配的规划方案和操作步骤,主要包括装配序列规划和装配路径规划。装配序列规划主要包括装配序列的几何可行性分析,装配序列的几何可行性分析指的是从几何约束的角度分析,两个装配单元之间的装配操作或分解操作不存在几何位置上的干涉现象。装配路径规划是在装配建模和装配序列的基础上,充分利用装配信息进行装配路径的分析和求解,生成一条无碰撞的从起点到终点的装配路径,从而达到优化设计的效果。
1.3 CATIA软件
CATIA软件是集成CAD、CAM和CAE技术于一体的多功能软件,有功能强大、易学易用和技术创新三大特点,这使得CATIA成为领先、主流的三维CAD解决方案,被广泛应用于航空航天、汽车制造、机械制造、消费品行业等领域。其集成解决方案覆盖所有的产品设计与制造方向,CATIA软件特有的DMU电子样机模块功能及虚拟制造技术更是推动着企业竞争力和生产力的提高。CATIA软件不仅提供如此强大的功能,而且对每个工程师和设计者来说,操作简单方便、易学易用,迎合所有工业领域的大、中、小型企业需要。
2 基于CATIA软件的产品装配建模
产品装配建模是产品虚拟装配仿真的基础,CATIA软件不仅是一款实体建模工具,而且是一个面向产品级的机械设计系统,可以实现产品的装配建模。本文以DSG湿式双离合器为例,应用CATIA软件的零件设计和装配设计模块,对DSG湿式双离合器进行装配建模,产品装配建模步骤如下。
运行CATIA 软件,进入机械设计——零件设计模块。以DSG湿式双离合器的外片壳体零件为例,选中xy平面,点击进入xy平面的草绘界面,在草绘工作区中绘制外片壳体零件的二维草绘图形。退出二维草绘模式,点击旋转命令创建360°壳体的旋转体,如图1所示。选中zx平面并进入草绘模式,绘制二维草绘图形以创建壳体内圈凹槽。选定已绘制的凹槽特征,点击进入阵列特征命令。设置阵列参数:实例为30,角度间距为12°,参考元素设置为zx平面,创建完阵列特征,得到包含内圈凹槽特征的外片壳体实体。同理可以绘出壳体外圈的凹槽和凹槽特征阵列后的实体。壳体的细节均通过草图、凸台、凹槽、阵列绘制而成,外片壳体模型如图2所示。
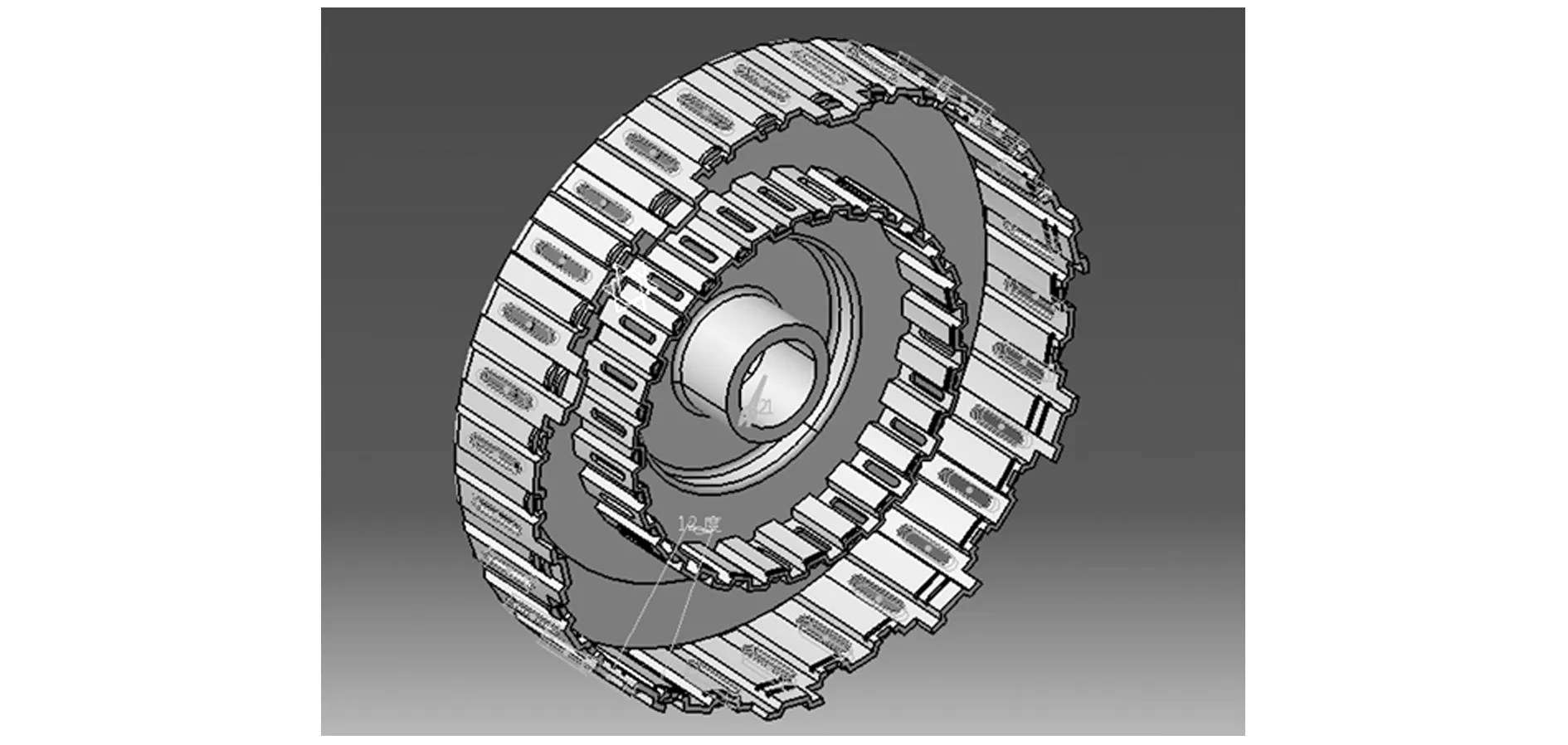
图2 外片壳体模型
进入机械设计——装配设计模块。新建文件Product,插入现有部件,选择所需装配文件(外片壳体),部件出现在相对坐标系的原点处。再次进入文件选择界面,选择所需装配文件(油缸活塞),部件出现在视口界面中,点击移动操作栏的移动命令,选择y方向进行移动,移动到合适位置即可,为下步装配约束做准备。点击相合约束,分别拾取两个部件(外片壳体和油缸活塞)的轴线,实现两个部件的轴线相重合,点击更新操作,即可实现相合约束。点击接触约束,分别拾取壳体与油缸活塞相接触的两个平面。点击更新操作,即可实现接触约束装配,拾取接触约束装配如图3所示。重复上述操作,可以继续实现膜片弹簧、内片壳体、钢片、摩擦片、外壳等部件的装配。零部件装配后拆开的爆炸图如图4所示,实现装配后,保存为Product文件。
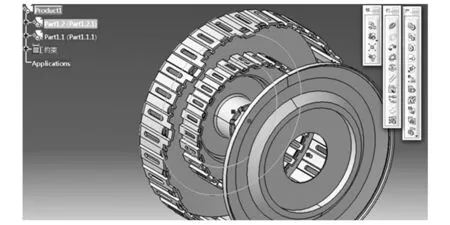
图3 拾取接触约束装配
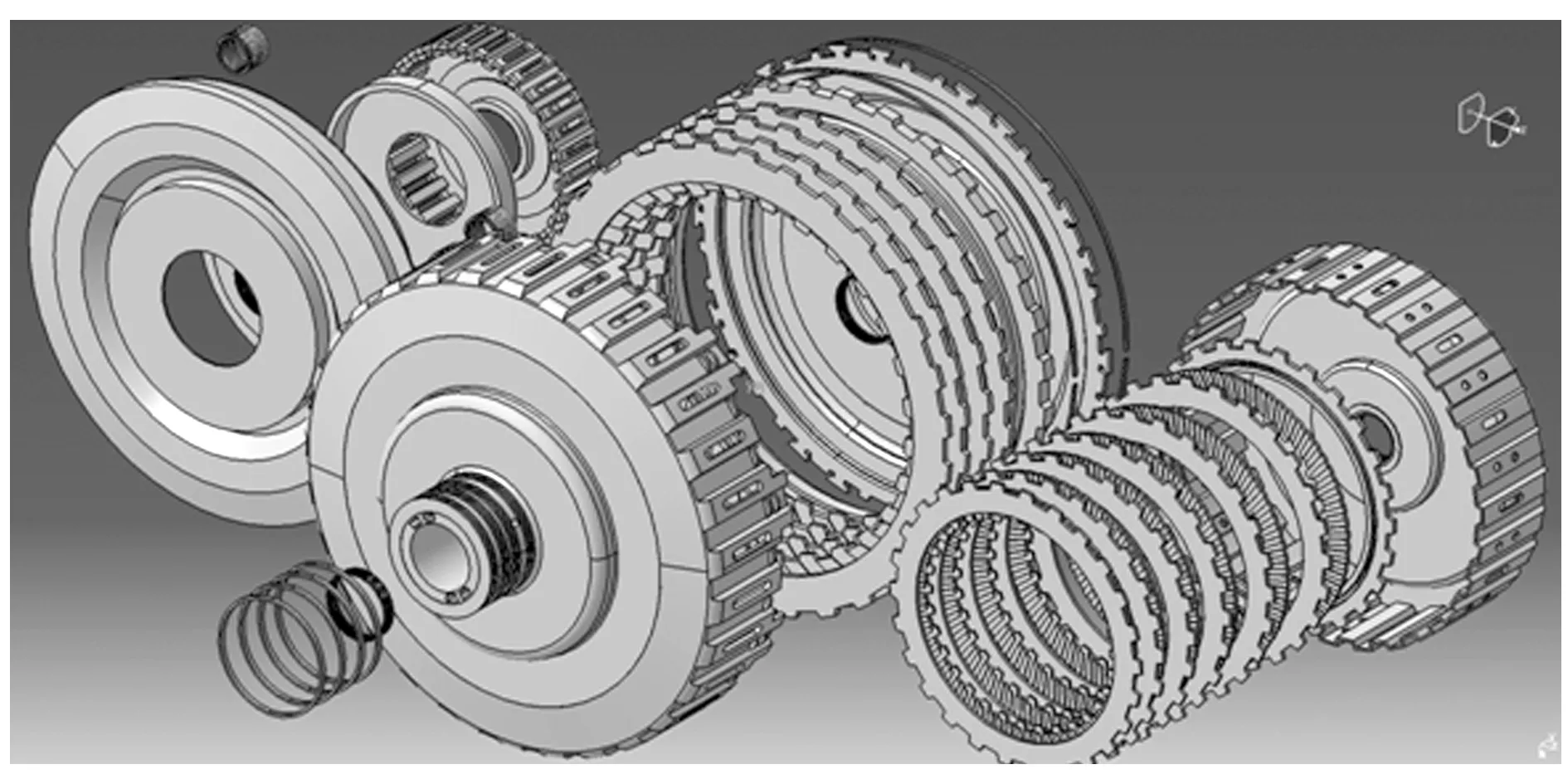
图4 DSG湿式双离合器零部件爆炸图
3 基于CATIA软件的产品装配规划
CATIA软件中的数字化装配——DMU Navigator模块是基于三维数模进行产品装配规划及动画展示的模块,可以直接使用3D模型创建产品的装配规划方案、爆炸图以及三维装配动画[10]。该模块整合了现在所有主流三维设计软件的文件格式,可以动态地查看装配体的所有运动,并且可以对运动的零部件进行动态干涉检查和间隙检测。DMU Navigator模块容易学习,动画制作效果流畅,且简单便捷。
产品的装配规划是对模型对象装配序列和装配路径的特别展示。在DMU Navigator模块中,产品的装配规划主要通过关键帧的编辑来实现,DMU Navigator模块中常用关键帧为位置关键帧,位置关键帧的编辑是产品装配规划的基础。产品装配规划中位置关键帧的设置需要依据产品的基本结构,以DSG湿式双离合器模型为例,位置关键帧设置前需要充分考虑DSG湿式双离合器的结构构成。按照“有顺序拆解”的基本原则,DSG湿式双离合器的拆解过程遵循从外往内、从前至后的顺序,从而避免装配序列错乱等问题的出现。DSG湿式双离合器的拆解路径以平移路径为主,路径编辑时,通过DMU Navigator模块的可视化动态效果实时观察干涉问题,以得到优化的装配路径,产品的装配规划及动画展示步骤如下。
运行CATIA 软件,进入数字化装配——DMU Navigator模块。点击DMU一般动画中的跟踪,选择所需移动的部件(外片壳体),该部件中心处出现可移动的相对坐标系,移动该坐标系至所需位置,点击记录,记录下移动的路径。同样步骤继续下个部件(油缸活塞)的跟踪移动和记录,跟踪移动部件如图5所示。同理,做好每个部件的跟踪移动和记录后,点击序列编辑,会话中的工作指令是刚刚记录完成的所有部件的移动追踪。按实际装配顺序,点击移动,将会话中的工作指令移入右侧序列中的工作指令,编辑好所有序列后,点击确认,序列编辑如图6所示。制作视频时,点击工具,进入图像——视频模块。录制视频时,首先打开播放器,点击向前播放,此时播放器播放刚刚编辑好的装配序列,点击视频录制器中的开始录制,而且可以点击参数设置,自行修改动画速度。动画录制输出的格式、地址、动画每秒桢速率则通过点击视频录制器中设置视频属性来实现编辑。
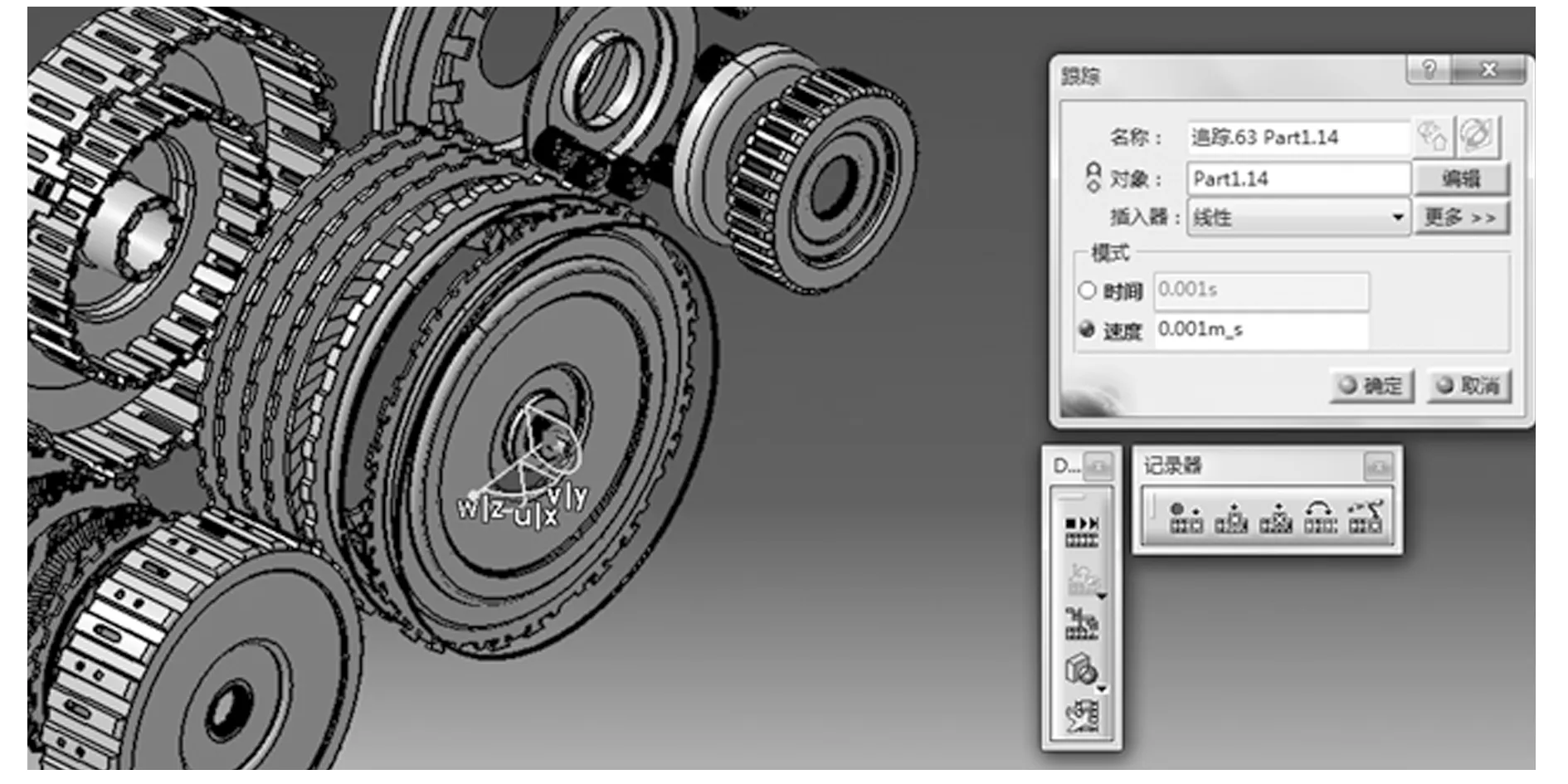
图5 跟踪移动部件
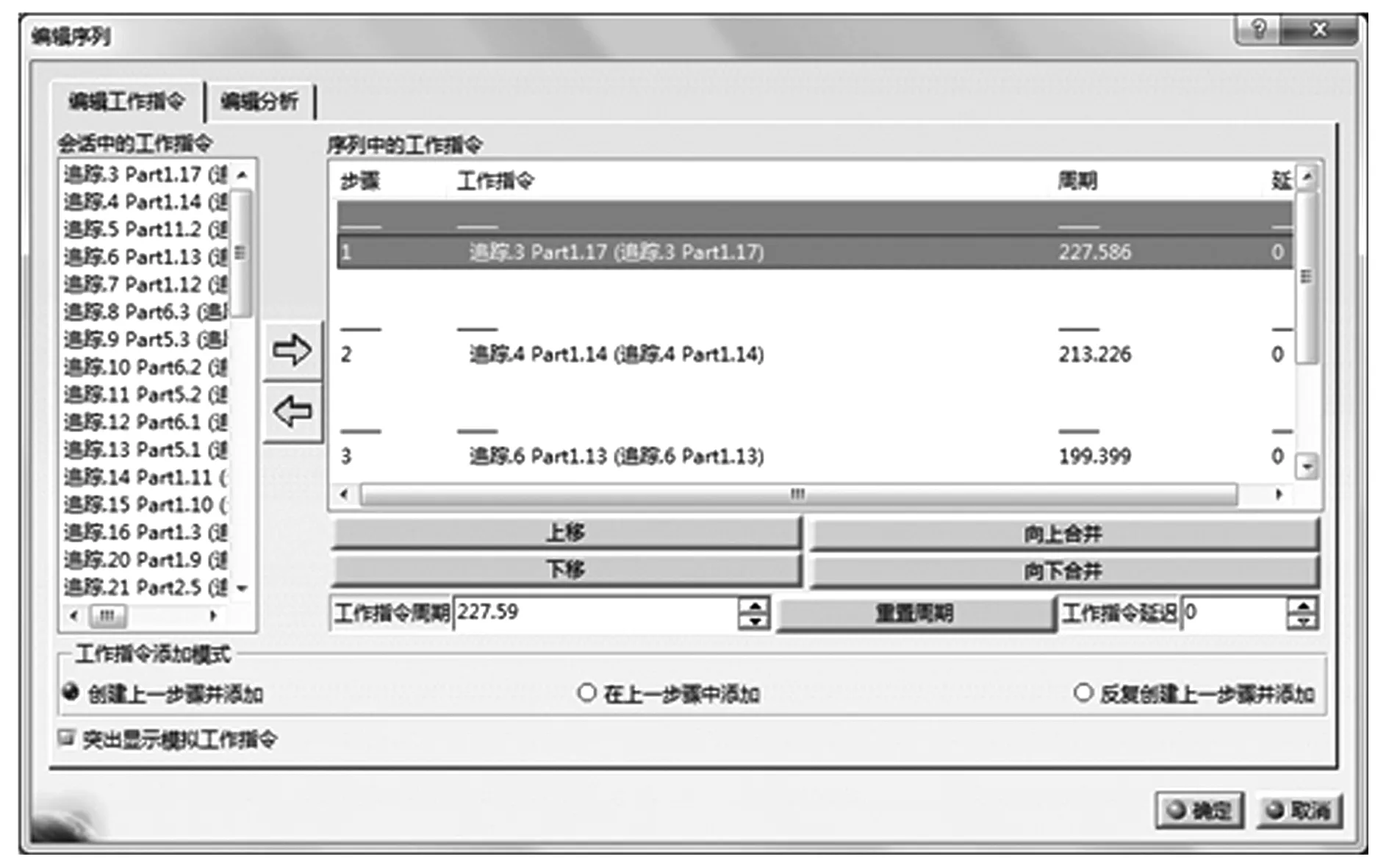
图6 序列编辑
4 结论
虚拟装配是指在虚拟现实环境下仿真装配过程,是虚拟制造的重要组成部分。虚拟装配仿真利用了CAD、CAM和VR技术的优点,模拟出虚拟的装配环境,可视化地展示装配过程,用于验证装配设计和操作过程的合理性,有利于优化装配方案,提高装配效率。本文将CATIA软件各模块功能结合应用,首先应用CATIA软件对DSG湿式双离合器进行装配建模,而后应用CATIA软件对DSG湿式双离合器进行装配规划。从产品的装配建模和产品的装配规划两个方向,探究基于CATIA软件的产品虚拟装配仿真应用的可行性,以期为CATIA软件在产品虚拟装配仿真中的应用提供指导。