集装箱运输半挂车自动锁头装置
2021-07-23纪海辉
纪海辉
中集车辆(集团)股份有限公司 广东深圳 518000
1 前言
目前,全球集装箱的车载陆地运输市场多采用集装箱运输半挂车运输的方式。在运输过程中,为防止惯性或经过坡道使集装箱侧翻,需要通过集装箱上的角座与集装箱运输半挂车车架上的锁具而连接,进而保持集装箱处于稳定的状态。角座通常为内部中空的矩形方体结构,并且角座上通常开设有一个大致呈椭圆形状的通孔。锁具为具有可旋转的锁头,大致呈扁半球状[1-2],见图1。
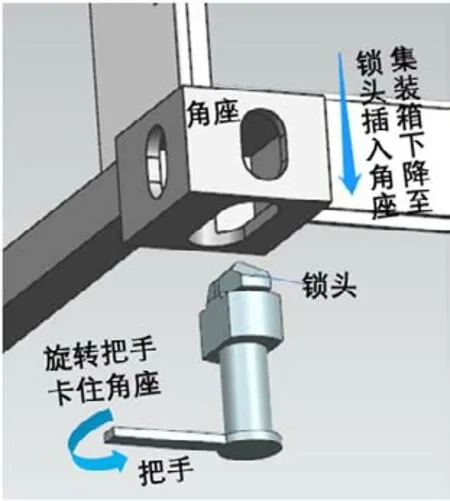
图 1 常规的锁头
当集装箱固定时,锁头可顺利通过通孔插入角座内,然后旋转锁头把手,使得锁头无法再从集装箱角座中移动出去,以达到将集装箱固定在车架上的作用。但现有锁头在装卸集装箱时,均由人工环绕整车四周手动操作锁头手柄来完成,不仅劳动强度大,工作效率较低,也无法满足无人作业的需求;且人工操作时也非常不便,容易产生遗漏,使锁头产生卡死或固定不到位,甚至损坏等问题,从而存在严重的安全隐患。
2 自动锁头装置方案
为解决上述技术问题,创新设计一种集装箱运输半挂车的自动锁头装置,见图2。
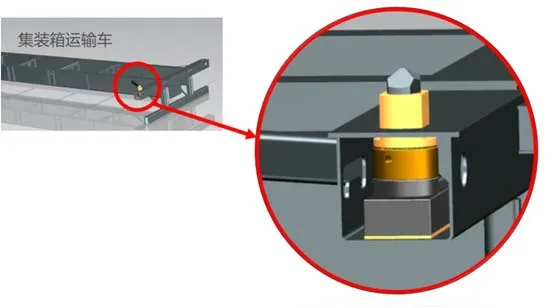
图2 集装箱运输车锁头局部放大图
通过遥控器发送挂车解锁、闭锁指令,挂车控制器驱动执行器(锁头电磁阀)执行相应的操作指令,对4个锁头(A、B、C、D)同时进行解锁、闭锁,并将锁头状态以及集装箱着箱状态由锁头位置和着箱传感器通过控制器发送至电磁阀上,可自动或遥控控制气缸驱动锁头的开闭及锁紧,原理如图3。该自动锁头装置包括机械结构系统和自动控制系统。
3 机械结构系统
机械结构系统结构见图4、图5。锁头座固定于车辆车架,锁头在无油轴承的作用下与锁头座形成径向支撑并可以相对转动,锁头通过自身螺纹和圆柱销与连接座连接,通过平面推力轴承与锁头座形成轴向支撑并可以相对转动;连接座通过连接零件与90°旋转气缸的旋转平台相连,并达到锁头在0~90°范围内可任意切换旋转,90°旋转气缸的底座通过连接零件与固定在车架上的安装板连接,考虑气缸是一种精密原件,车辆振动较大,考虑在90°旋转气缸的底座安装处增加一个刚度匹配的橡胶减振块,减小车辆振动的影响,提高装置的可靠性[3]。
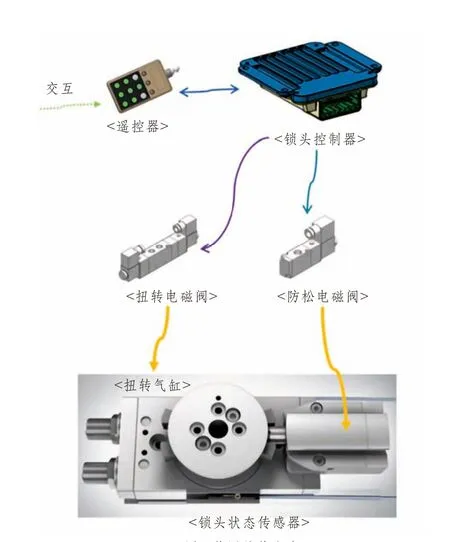
图3 装置总体方案
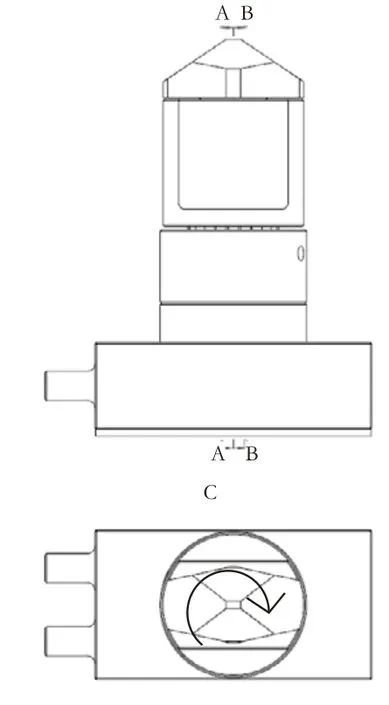
图4 机械结构系统总视图
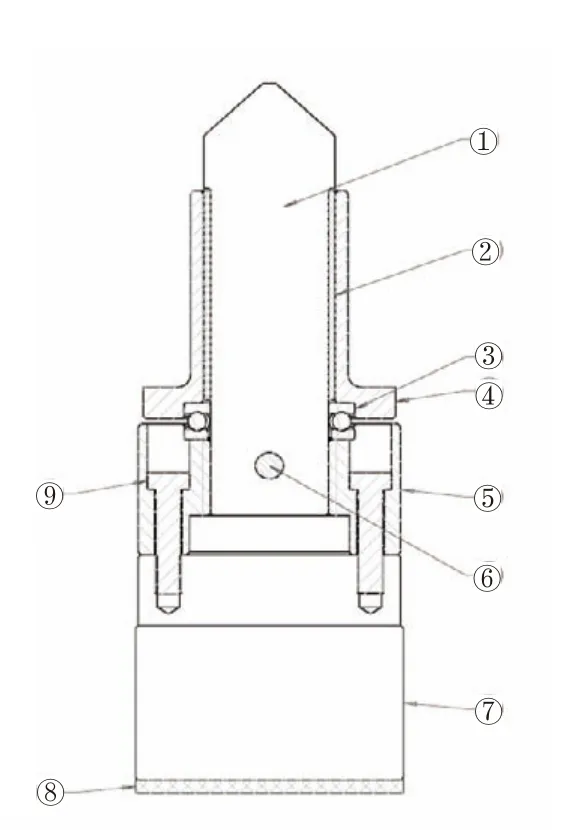
图5 机械结构系统组件
4 自动控制系统
自动控制系统见图6。遥控器A为自动线控操控器,指令输入端可适用于人为遥控,且人为遥控优先于其他通信控制,也可与该应用场景的其它相关机械设备通过自动网联进行通信交互。另一端与挂车控制器B以内部通信方式,通过遥控器发送挂车解锁、闭锁指令,挂车控制器B驱动执行器(防松电磁阀C,扭锁电磁阀D)执行相应的操作指令,对4个锁头同时进行解锁、闭锁。锁头状态以及集装箱着箱状态由锁头位置和着箱传感器通过CAN总线通讯发送到控制器及遥控器上,遥控器通过LED状态灯颜色指示当前锁止传感器及集装箱着箱状态,以便判断是否着箱和每个锁头的锁止状态。为防止机械部分可能会遇到一些特殊情况,比如机械部分可能出现卡死时与系统指令不一致的情况,指示灯提出警示[4]。
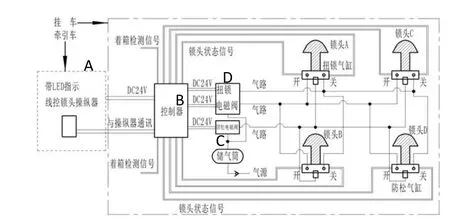
图6 控制逻辑图
4.1 具体工作流程
a. 实现锁头锁闭。
系统确认锁头全部处于打开状态,通过遥控器按键发送挂车闭锁指令,挂车控制器B驱动执行器,先对防松电磁阀C通电,电磁阀C通电后,对防松气缸通气。此时,在气压作用下,防松顶杆缩回,解除对旋转气缸的紧固,防松电磁阀C通电2 s后(暂定2 s,此延时可通过软件修改),对扭锁电磁阀D的锁头锁闭线圈通电。扭锁电磁阀D使旋转气缸的锁闭工作腔通气,旋转至锁闭位置,至锁头状态全部显示锁闭到位后,可断开扭锁电磁阀D及防松电磁阀C的电源(可使防松电磁阀C断电后稍做延时再对D断电),此时,防松气缸排气,防松顶杆在机械(弹簧)作用下伸出,顶入旋转气缸上的锁止槽,可防止旋转气缸转动。
b. 实现锁头解锁。
系统确认锁头全部处于锁闭状态,通过遥控器按键发送挂车解锁指令,挂车控制器B驱动执行器[5],先对防松电磁阀C通电,电磁阀C通电后,对防松气缸通气。此时,在气压作用下,防松顶杆缩回,解除对旋转气缸的紧固,防松电磁阀C通电2 s后(暂定2 s,建议此延时可通过软件修改),对扭锁电磁阀D的锁头解锁线圈通电。扭锁电磁阀D使旋转气缸的解锁工作腔通气,旋转至解锁位置,至锁头状态全部显示解锁到位后,可断开扭锁电磁阀D及防松电磁阀C的电源(可使防松电磁阀C断电后稍做延时再对D断电)。此时,防松气缸排气,防松顶杆在机械(弹簧)作用下伸出,顶入旋转气缸上的锁止槽,可防止旋转气缸转动。整个工作业务流程见图7。

图7 工作流程图
5 通信交互 自动联结
本装置主要为上述两个系统,同时统一选用对应车辆的低压电源。另外可充分利用半挂车制动气压作为动力源,将使用的压力、光电传感器及工业自动化气动元件相结合,自动控制驱动常规机械结构,可实现自动控制和遥控,与作业场景管理系统进行通信交互,自动联结其它相关应用设备,从而全面配合码头、大型堆场等自动装卸集装箱等无人化作业场景,将较大促进集装箱运输行业的自动化、无人化的发展。同时也防止有人场景人工遗漏开闭的问题的出现,节约劳动力,提升效率,防止人为失误。
6 结语
随着物流市场迅速掀起的自动化建设热潮,集装箱自动化作业运输的需求越来越迫切。目前洋山港、天津港、厦门远海码头等多个码头实现了无人化码头,同时还有部分无人化大型堆场正在建设中,将加速实现从集装箱、船舶到各地的道路运输采用无人操作。因此在集装箱运输半挂车上配置自动锁头,实现与各应用环境的交互对接,实现陆运与转运场地的无缝对接,对集装箱运输业的自动化发展具有积极重大意义。由于本文主要针对自动锁头产品进行阐述,如要达到真正的无人应用,还需涉及整个运营环境、设备等等之间配合和管理才能实现,相信在不久的将来,集装箱无人智能场站将在更多的地方投入使用,将会大幅度提高集装箱的装卸和转运效率。
