基于虚拟技术的机械基础实验仿真教学系统设计
2021-07-21张天宇吴央芳
张 俊,张天宇,吴央芳
(浙大城市学院 工程学院,浙江 杭州 310015)
虚拟现实(Virtual Reality),简称VR 技术,是采用计算机技术为核心的现代高科技手段生成的一种虚拟环境,具有交互性、沉浸性、仿真性等多种特性[1-2]。用户借助电脑、手机、VR 头盔等输入/输出设备,能够与虚拟世界中的物体进行自然的交互,并且能够通过视觉、听觉、触觉来获得与真实世界相同的感受[3]。
机械设计基础是一门理论性和实践性均较强的专业课程,既强调知识的综合性、实用性,又强调创新能力、综合分析和解决实践问题的能力[4]。配套的实验课程不仅能强化学生对理论知识的理解,还可以培养学生的动手能力、分析和解决问题的能力。目前,在教学过程中发现机械设计课程学习存在教学形式单一,学生不感兴趣,学生对抽象的机械结构比较难以理解等问题;实验教学当中,由于实验教学资源、教学时间、空间等限制,学生只能开展分组实验,很难做到每位同学都动手操作,影响了学生实践动手能力的培养[5-6]。基于VR 技术,利用Unity3D 开发平台搭建机械基础实验虚拟仿真教学系统,把虚拟现实和实践课程相结合,突破了教学资源、时间、空间的限制,使更多的学生受惠,同时提升了学生的自主学习、实践动手能力,优化了相关课程的教学体系。
1 系统总体框架设计
1.1 设计目的
系统以机械设计理论知识为基础,让学生在虚拟的实验环境中通过点击移动鼠标,自由拆装典型机械零部件,查看每一个零件的结构,观察传动机构运动仿真等学习方式,能够对机械结构有较为真实的感受,对抽象的理论知识有较为清晰,增强学生的理论水平、工程设计能力和实践动手能力,培养学生创新能力。
1.2 系统功能模块设计
以典型机械零部件为研究对象,开发具有交互式,仿真性的虚拟仿真教学系统。系统主要由四大功能模块组成,主要框架如图1 所示。
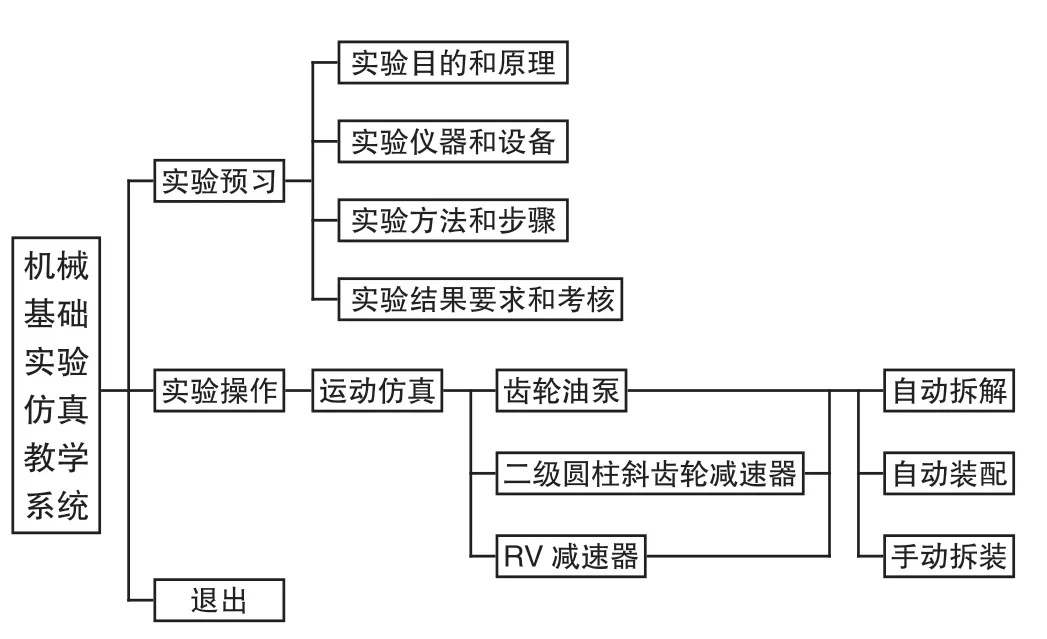
图1 系统总体框架图
1)实验预习模块。
如图1 系统总体框架图所示,实验预习模块包含实验目的原理、仪器设备、方法和步骤以及实验考核要求4 个二级功能模块,用文字说明及浏览的方式使学生实验前对该实验充分了解,在复习理论知识的同时理解实验内容。功能模块实验效果如图2 所示。
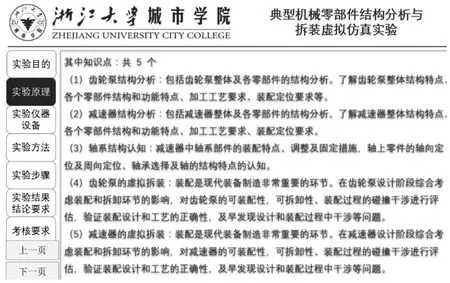
图2 实验预习功能模块
2)运动仿真模块。
运动仿真模块可以让机械零部件的外壳变得透明,学生能观察到内部齿轮等传动机构系统的工作。
在开始实验后,首先进入的就是运动仿真模块,学生可以学习三种典型机械结构的运动情况,为后续虚拟拆装做准备。运动仿真模块效果如图3 所示。

图3 运动仿真模块
3)模型缩放旋转模块。
模型旋转缩放是系统沉浸性的重要体现,学生可以通过鼠标右键实现模型旋转功能,鼠标中键滚动实现模型缩放功能。
4)虚拟拆装模块。
虚拟拆装模块是系统的主要功能模块,学生可通过点击旋转鼠标等方式拖动零件进行交互式拆装。
开始实验后,会出现齿轮泵、二级齿轮减速器、RV 减速器3 个按钮。任意点击一个即可进入相应的四级功能模块,出现自动装配、自动拆解、手动拆装按钮,实现相应功能。功能模块效果如图4 所示。
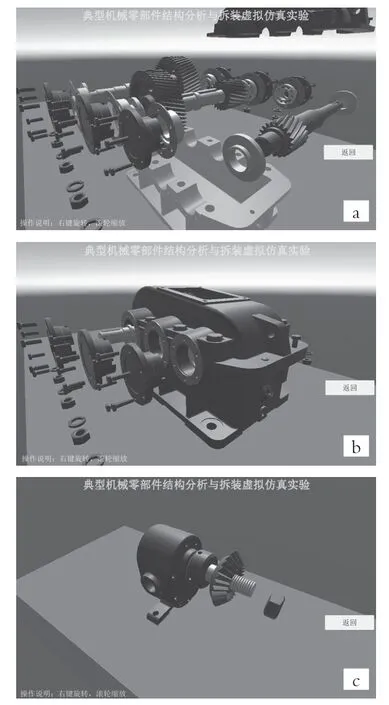
图4 虚拟拆装功能模块效果
2 系统开发与实现
2.1 开发平台与工具
系统开发平台选用Unity 3D,其拥有较高的跨平台性,可发布至Windows、Mac、iPhone、Android 等多个平台;3D 建模软件使用Solidworks;三维渲染优化软件采用3Ds MAX,其模型优化功能强大,在减少存储体积的同时可保持模型精度尺寸。
具体开发平台与工具如表1 所示。

表1 开发平台与工具
2.2 开发流程
系统开发流程:以Unity3D 为开发平台进行VR制作。首先运用SolidWorks 建立机械零部件模型并导入3Ds MAX 完成模型渲染优化,再将优化后模型导入Unity 3D 平台通过C#编写相关脚本实现系统各项功能,最后发布到相应平台,利用平台设备对虚拟实践教学系统进行效果展示。系统开发流程图如图5 所示。
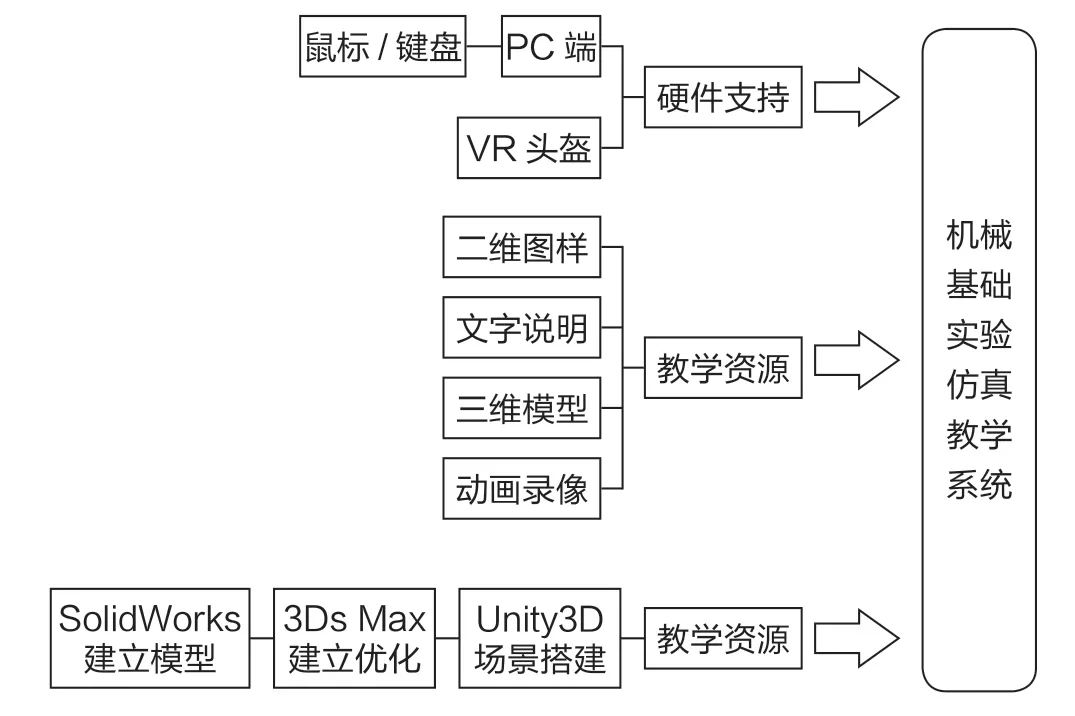
图5 系统开发流程图
2.3 机械零部件模型的建立和优化
机械零部件模型是虚拟仿真的主体,建模时可以将一些对虚拟拆装影响不大的结构进行合理省略,起到简化模型效果。
模型建立完成后,将文件导入3Ds Max 进行模型优化和坐标轴调整。模型优化功能可以在不影响模型精度的条件下减少模型面的数量,减少存储体积。坐标轴调整可以方便在Unity3D 中的后续开发。
2.4 模型虚拟场景搭建
将优化好的三维模型保存为MAX 或FBX 格式文件后,导入到Unity3D 软件中并做添加材质和展台等操作。将模型放置在展台上,模仿真实的实验室放置环境,完成模型虚拟场景的搭建。
2.5 模型自动拆解与装配功能实现
本系统通过Unity 3D 录制拆解和装配动画的方式实现相应的功能。以零部件实际工况下的拆解与装配过程为设计准则,录制整个拆解与装配的过程动画,为下一步的手动拆装提供参考。实现效果如图6 所示。
图6 自动拆解与装配实现效果
2.6 模型手动拆装功能实现
实现手动拆装功能需要对零件做添加碰撞控件并挂载脚本的操作,以达到用鼠标自由拖动、放置零件的效果。功能实现效果如图7 所示。
图7 手动拆装实现效果图
2.7 视角交互功能的实现
用鼠标调整观察视角的操作方式可以让用户有更直观,更具沉浸性的体验。其主要实现原理是通过脚本捕获鼠标移动和滚轮,以此调整摄像机的角度和位置。
2.8 运动仿真功能实现
运动仿真功能可以让学生清晰的观察到机械零部件内部齿轮的运作情况。功能主要实现原理是把相应脚本挂载到机械零部件的部分零件上,使其绕一根及一根以上的固定轴旋转,借此模拟真实运动情况。同时,可将箱体挂载透明材质,以显示出其内部运动情况。
2.9 交互性界面设计
用户交互界面设计是将相应脚本挂载到按钮上,构建相应层级关系。当用户点击按钮时,系统跳转至相应场景层级,实现对应功能。交互式界面包含自动拆装、手动拆装、实验预习、返回、退出等按钮。创建完成的系统层级界面如图8 所示。
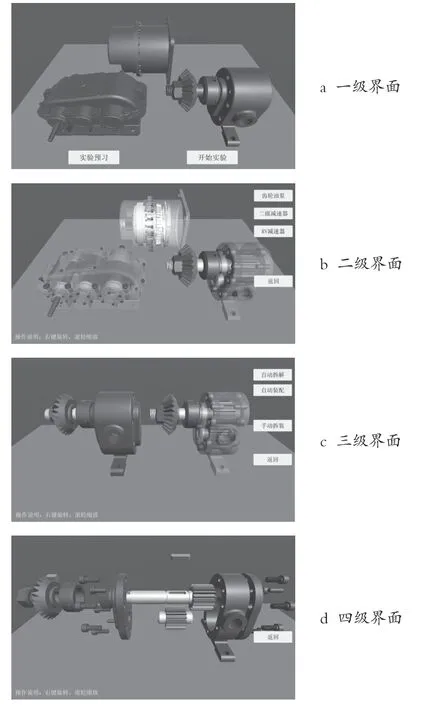
图8 系统层级界面
3 系统发布
Unity 拥有较高的跨平台性,可以将开发完成的虚拟仿真系统发布Android,PC,Xbox,PS4 等多个平台。以PC 端为例,完成各项发布前的各项设置后,即可发布一个包含exe 可执行文件的文件夹,运行exe 文件即可在PC 端使用虚拟仿真系统。
在Android 平台上发布,需要设置对应的SDK,JDK,NDK 软件开发工具包以调试好发布环境。完成调试后,将发布平台改为Android,单击Build 即可生成一个apk 文件。在Android 手机上安装该文件,即可在手机上使用本系统。系统发布后的登录界面如图9 所示。

图9 系统发布后登录界面
在发布至PC 端的基础上,还可以通过软件左右分屏的形式,在VR 头盔上立体显示,利用头盔的位置跟随功能和手柄操作等多个形式与系统更沉浸的交互。
4 结语
针对机械设计实验开发的虚拟仿真教学系统通过运用Unity 3d 等工具实现了在人机交互下的虚拟装配。学生可以在虚拟环境下对典型机械零部件进行反复拆装练习和结构分析,巩固知识,操作简单,提升学生主动学习能力,学生反馈良好。亦可将其应用到更多的专业课程的实践教学当中,进一步促进工科专业线上线下混合教育改革的深入实施。
