WER新拼装小车功能调试与测试教学设计
2021-07-20邓丁周迪
邓丁 周迪
教学目标:(1)知识与技能:①掌握机器人小车的组装方法。②WER新拼装小车功能调试于测试。(2)过程与方法。通过让学生实操来进行本课的学习,在学习拼装机器人小车和接线过程中提高他们的动手能力和创新意识。主要是以示意图展示和老师拼装指导为辅,学生操作为主的方式进行本课。(3)情感态与价值观。有意识培养学生的讨论、及合作意识、培养他们热爱科学、学习科学的精神,提高他们的动手操作能力和创新意识。
教学重点:机器人小车功能调试。
教学难点:接线。
教学准备:笔记本电脑、WER机器人套装组合零件。
课时安排:1课时。
课型:授新课
教学过程:
(1)导入:上节课已经基本完成了機器人小车的拼装,但是只有轮子的小车是跑不起来的,怎么能让小车跑起来呢需要马达的转动,那么马达又如何带动车轮动呢今天我们继续学习。
(2)新课:机器人小车接线操作。
第一步:接线。
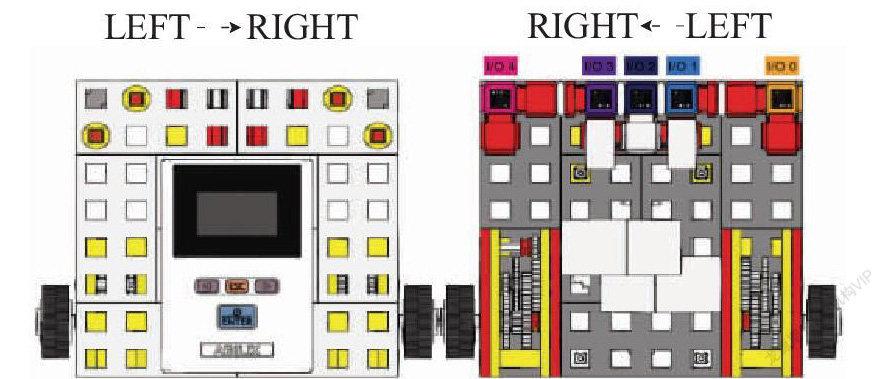
A.教师展示接线步骤,学生以小组为单位进行拼装,老师适当进行讲解。如左下图摆放,灰度传感器从左到右依次接在1/O 0到1/O 4上,左侧电机挂在DCO上,右侧电机接在DC1上,接线尽量整齐成束,可以使用两个L型件进行约束。
B.学生活动:跟着教师讲解按步骤完成接线,教师讲解接线原理,学生以小组为单位进行讨论接线过程中存在的问题,及自己解接线过程中存在的疑问,教师指导。
C.小组合作探究:进行感光装置测试,左右后轮转动测试。
第二步:地面灰度传感器性能测试
A.使用白底黑线的场地,或者使用白色桌面和黑色绝缘胶带搭建一个白底黑线的环境。
B.控制器安装好电池,打开控制器,调整到“AI”界面。
C.将机器人的灰色传感器放在白色区域上,观察控制器屏幕上的AI界面,1/O 0-1/O 4的数值应该小于1000(不为0),如果数值大于1000,请调整降低传感器的高度,可以在固定灰度的与平板接触的4个立方体上加立方体连接器,如果数值为0,则传感器故障或接线错误。
D.将机器人的灰度传感器放在黑色区域上,观察控制器屏幕上的AI界面,1/O 0-1/O 4口的数值应该大于3900,
E.手持机器人向左平移,灰度传感器依次从白色地面扫向黑线然后再脱离黑线,观察屏幕显示,会发现从0-4的数值依次变化,从而确认接线正确,如果不受从0-4依次变化数值,不正常端口上的灰度传路器可能接错。
第三步:电机齿轮组性能测试:
A.手持机器人,打开拉制器的“电机”界面,设置选择全部电机,逐步设置速度10-100,观察两轮的运动状态:速度为20时轮子能转动,如不能请检查齿轮组平板是否平行、平板与L型件安装是否到位。
B.在电机转动时,通过找下DC口的电机线使电机停的方法确认接线是否正确。
C.在“电机”界面把所有电机速废调整为100,把机器人放在地面上,机器人能够顺时针旋转。
课堂小结:这节课主要是让学生动手进行机器人小车接线操作,让学生在实际的操作过程中理解电机与齿轮的连接关系,掌握机器人运行的基本原理。
板书设计:WER小车拼装——新拼装小车功能调试与测试。①按照示意图进行接线操作。②反复进行小车功能测试。
