路网状态和驾驶心理驱动的风险规避研究
2021-07-20焦方源李薇
焦方源 李薇

摘 要:针对驾驶风险随驾驶心态和路网信息发生变化,而目前个性化智能导航却极其落后的严峻问题,以易受路网信息和驾驶心态影响的驾驶行为过程为研究对象,深入研究了路网状态及驾驶心态与驾驶风险的本质联系,提出了路网信息指标和驾驶风险参数及计算方法;以城乡道路、高速公路相结合的车辆行驶环境为模型,运用逐级动态优化原理,设计了适时路网信息和驾驶心态驱动下驾驶风险逐级动态智能规避机制算法,并运用Matlab仿真平台对驾驶风险参数进行了仿真分析。结果表明,本算法能够根据路网信息和驾驶心态适时分析计算驾驶风险并进行适时线路优化,达到了驾驶风险控制和决策过程智能化目的。
关键词:路况感知;风险规避;智能决策;个性导航;仿真分析
中图分类号:TP399 文献标识码:A
Abstract: Driving risk changes with driving mentality and road network information, while the current personalized intelligent navigation is extremely backward. In view of the problem, this paper takes driving behavior process that is easily affected by road network information and driving mentality as the research object, and conducts in-depth research on road network status and the essential connection between driving mentality and driving risk. It proposes road network information indicators, driving risk parameters and calculation methods. Algorithm of dynamic intelligent avoidance mechanism of driving risk driven by timely road network information and driving mentality is developed, taking vehicle driving environment that combines urban and rural roads and expressways as a model, and using the principle of gradual dynamic optimization. Matlab simulation platform is used to simulate and analyze driving risk parameters. The results show that the algorithm can analyze and calculate driving risks in a timely manner based on road network information and driving mentality, and timely optimize routes, realizing driving risk control and intelligent decision-making process.
Keywords: road condition perception; risk avoidance; intelligent decision-making; personalized navigation; simulation analysis
1 引言(Introduction)
推進智慧城市建设是我国社会发展的必然趋势,智能交通是其中极为重要的领域,提高道路利用率和道路交通的安全程度成为迫切需要[1]。国内外学者普遍认为,单纯增加道路设施或限制汽车数量是远远不够的,更重要的是如何更加合理地使用现有的交通设施,同时将现代的高新信息处理技术运用到交通管理中以提高路网的交通性能和安全性能[2]。然而,我国在智能交通领域仍处于亟待发展和提高的阶段,近年来重特大交通事故仍然频繁发生,严重威胁着人民生命和财产安全[3]。驾驶人的异常心理状态是引发重特大交通事故极其重要的因素[4],目前驾驶心理、道路状况和风险规避的关系研究尚处于局部领域和初级阶段,更是缺少驾驶心理在交通事故风险规避中机理和有效实现方法的深入研究[5],特别是在将适时路况信息与驾驶人心理相结合,利用智能信息处理技术实现有效规避驾驶风险方面还处于起步阶段,更没有达到交通事故可靠智能防范的实用状态[6]。驾驶风险动态智能规避已成为提高人民生活质量的迫切需要和未来交通安全的发展方向[7]。本文着力探讨适时路网信息和异常驾驶心态共同作用下的路、驾状态特征和驾驶风险估算,并提出能够有效降低驾驶风险的驾驶路线逐级动态智能优化算法,力求达到总体驾驶风险最小化的目的。
2 路、驾状态与驾驶风险系数设置(Coifficent setting of road information,drivers' mentality and driving risks)
以最低风险为目的逐级动态智能优化过程,就是根据当前驾驶人的驾驶心态和当前路网信息进行适时分析、风险估算,进一步对将要行驶的路线进行动态优化调整的过程[8]。为了更好地满足车辆行驶过程中路网信息采集、风险计算、路线优化的需要,现对驾驶人心态、路况信息和驾驶风险参数作如下设置。
2.1 路况状态及其风险系数设置
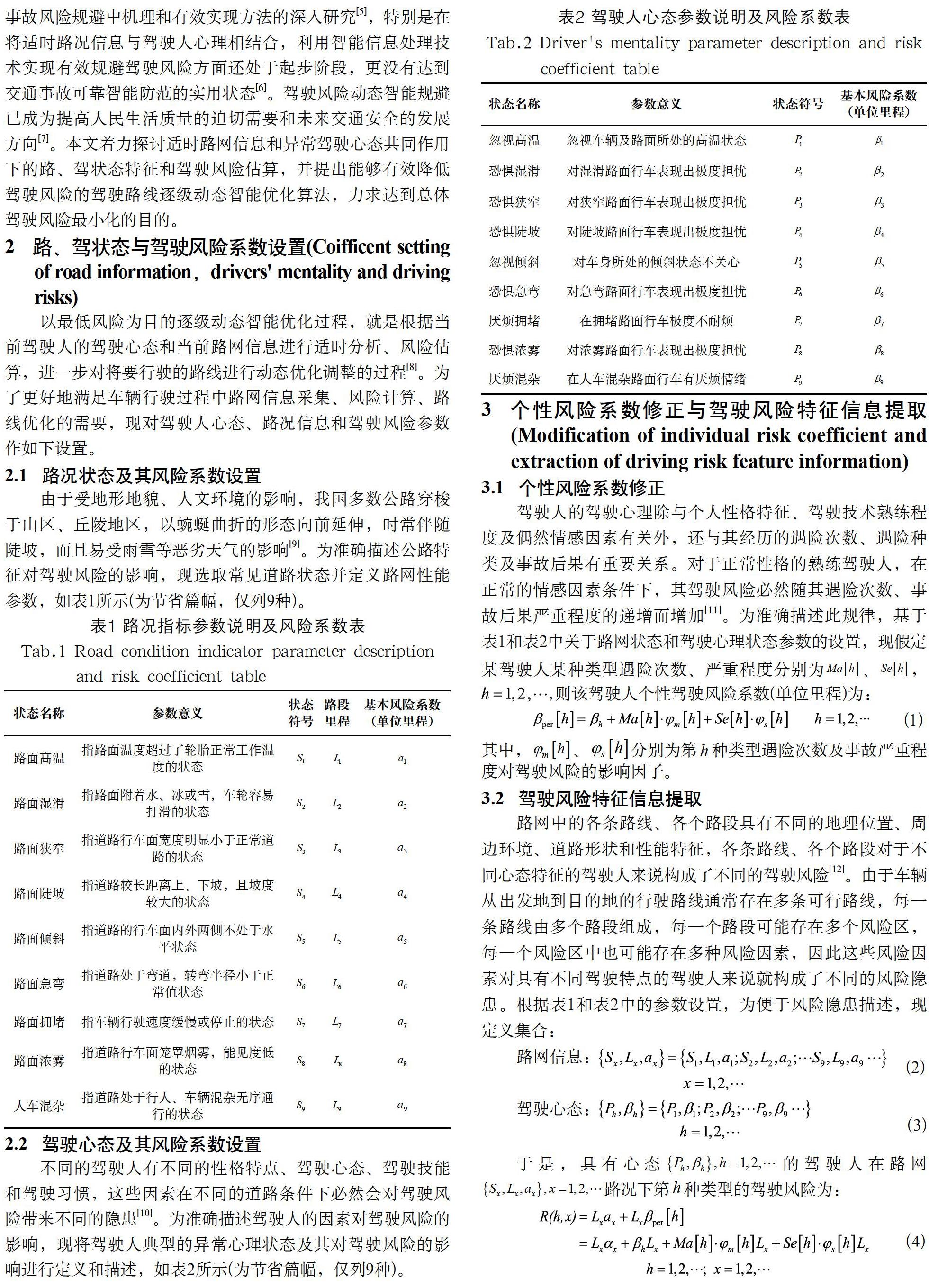
由于受地形地貌、人文环境的影响,我国多数公路穿梭于山区、丘陵地区,以蜿蜒曲折的形态向前延伸,时常伴随陡坡,而且易受雨雪等恶劣天气的影响[9]。为准确描述公路特征对驾驶风险的影响,现选取常见道路状态并定义路网性能参数,如表1所示(为节省篇幅,仅列9种)。
2.2 驾驶心态及其风险系数设置
不同的驾驶人有不同的性格特点、驾驶心态、驾驶技能和驾驶习惯,这些因素在不同的道路条件下必然会对驾驶风险带来不同的隐患[10]。为准确描述驾驶人的因素对驾驶风险的影响,现将驾驶人典型的异常心理状态及其对驾驶风险的影响进行定义和描述,如表2所示(为节省篇幅,仅列9种)。
3.1 个性风险系数修正
驾驶人的驾驶心理除与个人性格特征、驾驶技术熟练程度及偶然情感因素有关外,还与其经历的遇险次数、遇险种类及事故后果有重要关系。对于正常性格的熟练驾驶人,在正常的情感因素条件下,其驾驶风险必然随其遇险次数、事故后果严重程度的递增而增加[11]。为准确描述此规律,基于
5 驾驶风险智能动态规避算法(Driving risk intelligent dynamic avoidance algorithm)
随着车辆的不断行进,车辆所处的环境、路段及性能也不断发生改变,前方将要经过的路段和风险区域也将发生变化,驾驶人将要面对的驾驶风险必将随着不同行驶路线而发生变化[13]。以最低风险为目的动态逐级智能优化导航就是以表1、表2设置的基本参数为分析对象,以按特定频率和时间间隔更新的路况和心理数据为基本数据,每一次搜索优化过程都运用式(6)—式(12)的计算方法,对车辆将要行驶路线的风险特征进行数值分析和动态优化,得到车辆的当前最优(驾驶风险最小)行驶路线;整个行驶过程中搜索优化过程按特定频率和时间间隔重复进行,直到车辆到达目的地,以此保证车辆始终在风险最小路线上行驶。逐级动态智能优化过程详细流程如图2所示,其中表示当前路线,;表示当前路线当前路段,;表示当前路线当前路段当前风险区,;表示当前路线当前路段当前风险区中的某种风险隐患,。
6 仿真实验设计与数据分析(Simulation experiment design and data analysis)
6.1 仿真实验设计
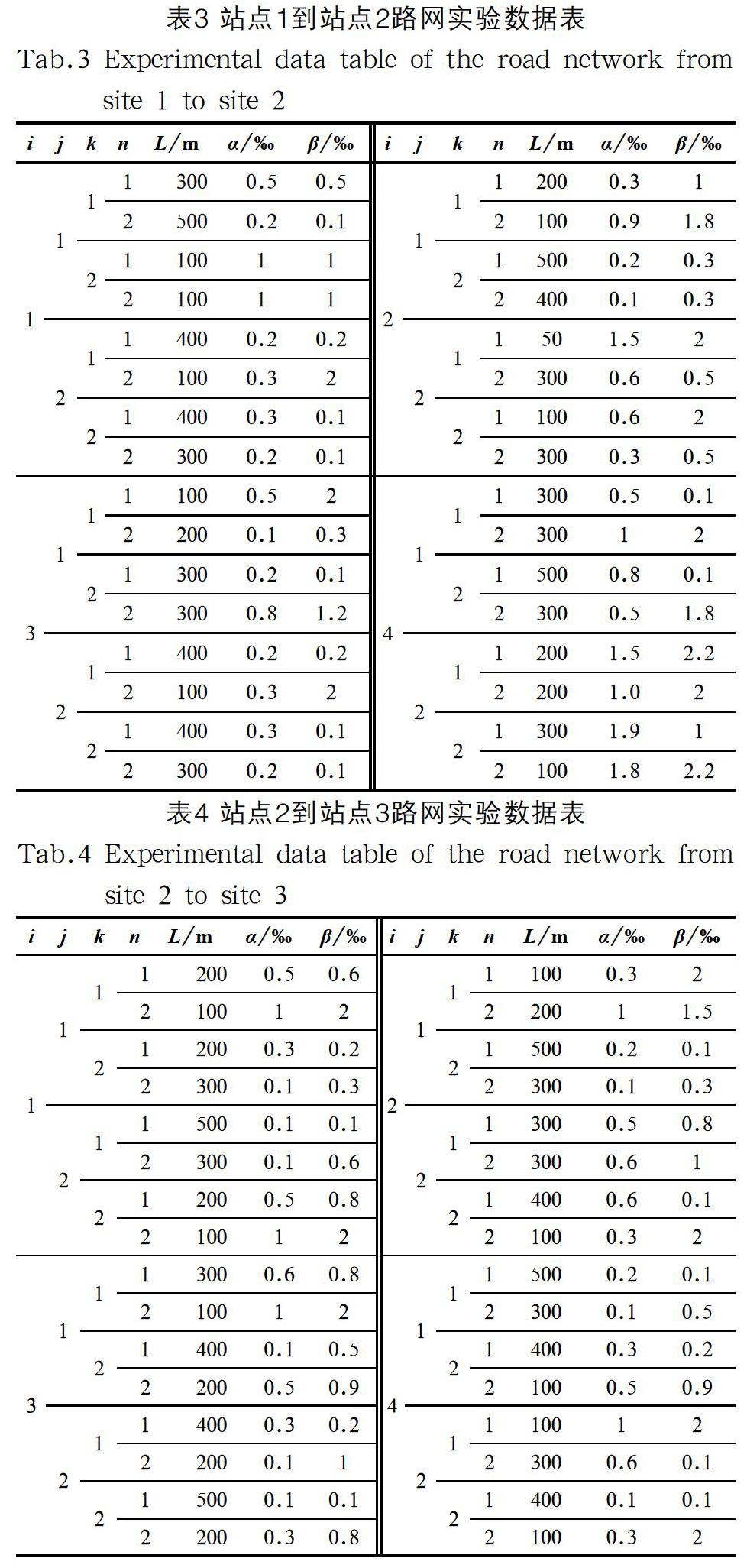
车辆行驶过程就是特定心态驾驶人控制车辆沿特定路线经过一系列不同地理位置、路况和环境的过程,其中驾驶人的心态、路况及环境等因素均可能随时间而变化,因此车辆行驶过程中驾驶风险值也将随时间不断变化。但是,车辆行驶是有一定速度的,如果风险路段距离较短,在这个路段上行驶的时间就会很短,在此时间范围内驾驶风险则处于相对稳定状态,可视为稳定值。逐级动态智能优化导航就是根据这些短暂的稳定值来计算将要行驶路线的驾驶风险值,从而对行驶路线进行优化。为体现本机制的实际效果和简化数据分析过程,现假定某驾驶人驾车从出发地(站点1)到目的地(站点4),途经2个中间站点,而且相邻站点之间有4条通行路线可选,每一条路线都有不同的路况参数,具体信息如表3—表5所示。
6.2 仿真数据分析
对表3—表5所示数据,运用式(6)—式(12)的参数计算方法,通过Matlab仿真平台分别运用动态逐级优化智能导航及传统路径最短优先导航过程中的驾驶风险等特征参数进行仿真,得到仿真结果如图3和图4所示。
针对图3,根据实验设计方案,从出发地到目的地有2个中间站点,每个站点到下一站点有4条路线,每条路线有不同的驾驶风险值。根据图3所示仿真数据,当特定驾驶人驾驶车辆到达站点1后应该选择里程值最小的路线4行驶,到达站点2
后也应该选择里程数最小的路线4行驶,到达站点3后仍应该选择里程最小的路线4到达站点4。于是,根据逐级动态智能优化导航方法,产生了行驶路径:站点1路线4→站点2路
线4→站点3路线4→站点4,驾驶风险总值为2.0‰。
图4为各站点及各路线的实际行驶里程及風险系数值,仍然运用表3—表5的数据,根据OSPF(路径最短优先)导航原则,当特定驾驶人驾驶车辆到达站点1后应该选择风险值小的
路线3行驶,到达站点2后应该选择风险最小的路线4行驶,到达站点3后应该选择路线3到达站点4。于是,基于OSPF优化产生了最优行驶路径:站点1路线3→站点2路线4→站点3路
线3→站点4,驾驶风险总值为5.62‰。
从以上两种结果可知,逐级动态智能优化得到的最优行驶路线“站点1路线4→站点2路线4→站点3路线4→站点4”是针对特定驾驶人的心理状态,按逐级优化的方法得出的结果;而OSPF优化得到的路线“站点1路线3→站点2路线4→站点3路线3→站点4”是在忽略驾驶人心理状态条件下得出的结果。前者驾驶风险总值为2.0‰,而后者驾驶风险总值为5.62‰,无论从信息处理方法的智能化程度还是风险控制原理及效果方面看,前者风险控制效果更好,达到了有效控制驾驶风险的设计目的。
7 结论(Conclusion)
首先,针对个性差异化导航智能决策及驾驶风险控制问题,以车辆运行过程中基于适时路网信息和驾驶人心态的驾驶行为过程为研究对象,提出了路网性能指标和驾驶风险参数及其计算方法;其次,设计了适时路网信息和驾驶心态驱动下,旨在有效降低驾驶风险的逐级智能动态风险规避算法;最后,用仿真实验的方法对设计效果进行了验证。结果表明,本机制能够有效降低总体驾驶风险,并实现风险控制过程的智能化,达到了设计目的。本文创新性地将适时路况信息与驾驶心理相结合,运用逐级动态优化原理,有效实现了驾驶风险的智能规避。
参考文献(References)
[1] 陈俊亚.高速公路高风险路段的行车风险控制研究[D].西安:长安大学,2019.
[2] 陶刚.基于公安交通管理大数据的道路交通安全决策支持关键技术研究[D].西安:长安大学,2016.
[3] 祝春梅.城市道路交通安全影响因素综合分析研究[D].广州:华南理工大学,2015.
[4] 乔春玲.即时情绪和驾驶经验在驾驶决策过程不同阶段的特征表现[D].沈阳:辽宁师范大学,2018.
[5] 刘天亮,黄海军,陈剑.考虑风险规避和认知更新的日常择路行为演进[J].交通运输工程学报,2008,8(4):90-94,103.
[6] 赵亮.农村公路复杂条件下驾驶人典型生理心理指标变化规律及驾驶行为研究[D].西安:长安大学,2018.
[7] 丁天麟.考虑出行者风险态度的最优路内停车策略研究及仿真分析[D].南京:南京大学,2017.
[8] 瞿卫东.考虑风险规避的路径选择模型研究[D].长春:吉林大学,2018.
[9] 罗杰.山地城市道路交通安全评价指标与评价方法研究[D].重庆:重庆交通大学,2013.
[10] 严霞.愤怒和恐惧情景对风险决策的影响研究[D].重庆:西南大学,2008.
[11] APPARAO G, MALLIKARJUNAREDDY P, SSSV G R. Identification of accident black spots for national highway using GIS[J]. International Journal of Scientific & Technology Research, 2013, 2(2):154-157.
[12] 文聰.山区高速公路事故风险因子识别与等级度量研究[D].西安:长安大学,2019.
[13] 王远强.面向交通数据的事故分析与预测[D].天津:天津大学,2016.
作者简介:
焦方源(1969-),男,硕士,副教授.研究领域:智能信息处理.
李 薇(1982-),女,硕士,副教授.研究领域:计算机应用.