非接触物体尺寸形态测量系统
2021-07-19王敏冯旭谭旭洋
王敏 冯旭 谭旭洋

摘要:该文阐述了以树莓派3b+为主控,利用单目测距方法,OpenCV计算机视觉库,VGG网络模型的非接触物体尺寸形态测量系统的设计与实现。通过树莓派3b+对引导标识的图像识别捕获处理得到平面目标颜色、形状、尺寸、距离,以及球的种类,与球表面最近的距离。最终测试结果表明:该系统能够正确识别目标形状、类别、颜色,测距误差及图像处理时长能满足系统要求。
关键词:单目测距;OpenCV;VGG网络模型;非接觸测量
中图分类号:TP393 文献标识码:A
文章编号:1009-3044(2021)13-0246-03
1 引言
随着流水线智能化、自动化水平的提高,要求机械手能自主识别流水线上的工件[1]。为了让机械手能够准确识别工件,并且处理时间短是十分有必要的。针对这一问题,本设计研究非接触物体尺寸形态测量系统,一键式启动系统自动识别,能够准确获取物体尺寸形态信息。
2 系统方案总体设计
系统总体框图如图1所示:摄像头作为数据采集器,获取目标的图像信息;通过按键获取当前工作模式,进入相应工作状态。树莓派3b+对采集到的图像数据进行分析,对舵机进行控制使摄像头旋转指向目标位置; HDMI显示屏显示处理结果。
3 理论分析与计算
3.1 识别平面目标形状算法原理
本系统有三种测试平面目标形状:正三角形,圆,正方形。若目标区域的左右顶点像素长与上下顶点像素长的差值大于设定阈值并且目标像素顶点在设定的阈值内存在重合点,则目标图形为三角形。反之,则为圆形或者正方形。进一步判断,作目标区域的外接矩形,设定上界线与下界线如图2所示,其中上界线与下界线到外接矩形中心距离相等。若外接矩形减去四个三角形大于设定阈值并且在外接矩形中上界线与下界线所在行的目标像素点数目均大于设定阈值,则目标形状为圆形。反之,为正方形。从而实现了平面目标形状的识别。
3.2 测量平面目标尺寸算法原理
4 电路与程序设计
4.1 主控接口电路设计
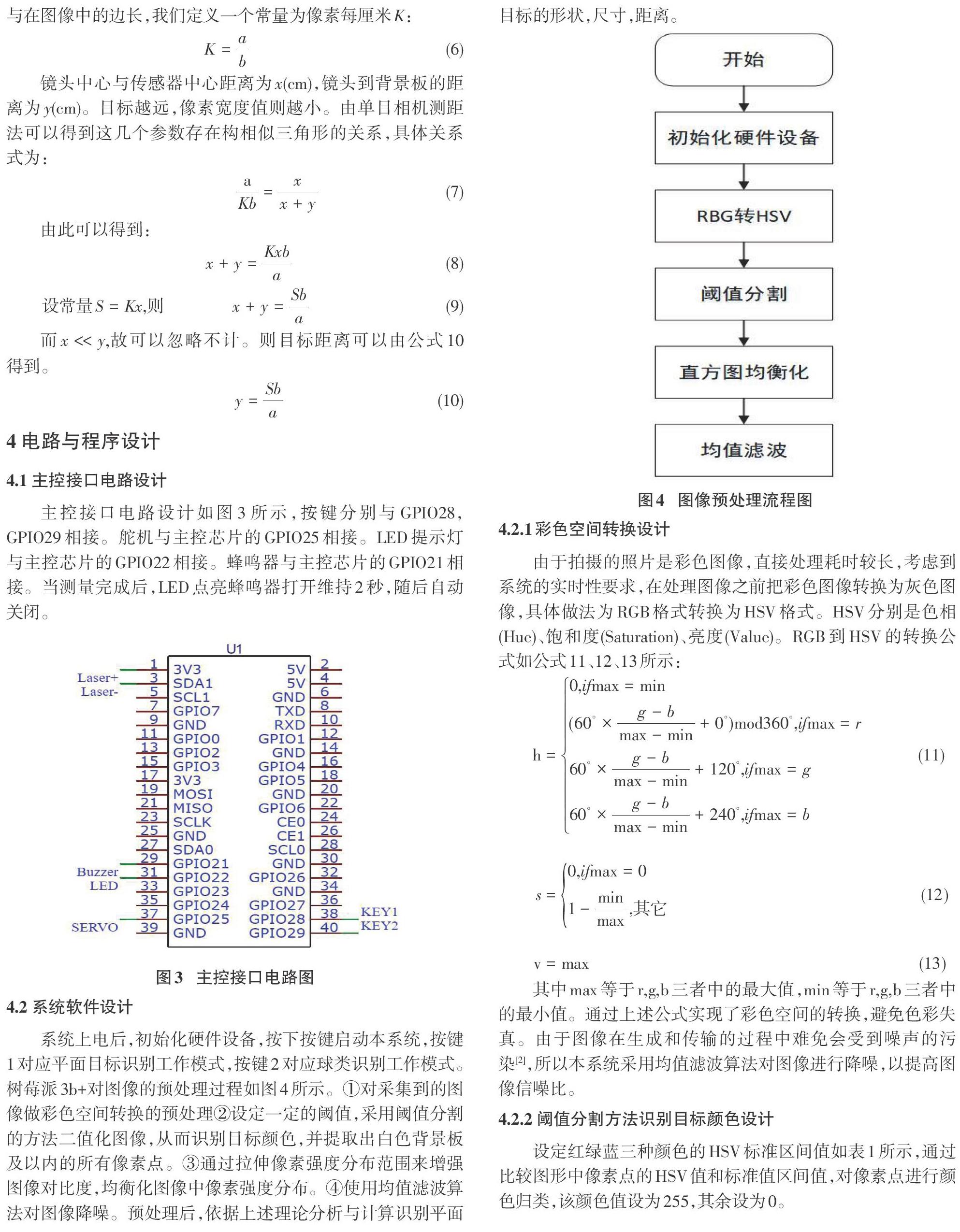
主控接口电路设计如图3所示,按键分别与GPIO28,GPIO29相接。舵机与主控芯片的GPIO25相接。LED提示灯与主控芯片的GPIO22相接。蜂鸣器与主控芯片的GPIO21相接。当测量完成后,LED点亮蜂鸣器打开维持2秒,随后自动关闭。
4.2 系统软件设计
系统上电后,初始化硬件设备,按下按键启动本系统,按键1对应平面目标识别工作模式,按键2对应球类识别工作模式。树莓派3b+对图像的预处理过程如图4所示。①对采集到的图像做彩色空间转换的预处理②设定一定的阈值,采用阈值分割的方法二值化图像,从而识别目标颜色,并提取出白色背景板及以内的所有像素点。③通过拉伸像素强度分布范围来增强图像对比度,均衡化图像中像素强度分布。④使用均值滤波算法对图像降噪。预处理后,依据上述理论分析与计算识别平面目标的形状,尺寸,距离。
4.2.1彩色空间转换设计
由于拍摄的照片是彩色图像,直接处理耗时较长,考虑到系统的实时性要求,在处理图像之前把彩色图像转换为灰色图像,具体做法为RGB格式转换为HSV格式。HSV分别是色相(Hue)、饱和度(Saturation)、亮度(Value)。RGB到HSV的转换公式如公式11、12、13所示:
其中max等于r,g,b三者中的最大值,min等于r,g,b三者中的最小值。通过上述公式实现了彩色空间的转换,避免色彩失真。由于图像在生成和传输的过程中难免会受到噪声的污染[2],所以本系统采用均值滤波算法对图像进行降噪,以提高图像信噪比。
4.2.2 阈值分割方法识别目标颜色设计
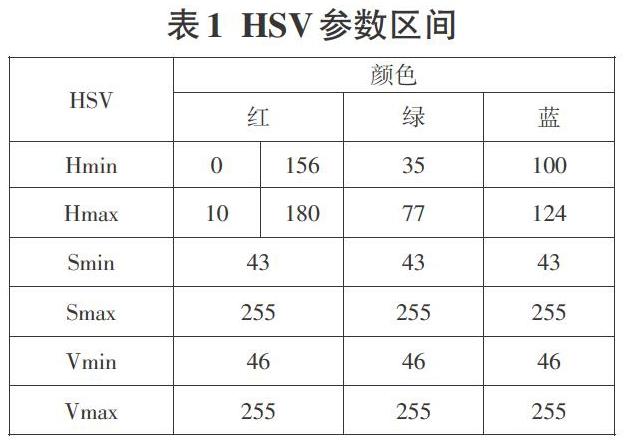
设定红绿蓝三种颜色的HSV标准区间值如表1所示,通过比较图形中像素点的HSV值和标准值区间值,对像素点进行颜色归类,该颜色值设为255,其余设为0。
4.2.3 判别球的种类程序设计
球类识别采用VGG网络模型。VGG网络是一种经典的卷积神经网络, 卷积神经网络是一种建立在传统人工神经网络的深度学习算法[3]。主要包含卷积层、池化层、全连接层、softmax分类器。
本系统有三种类型的球:篮球、排球、足球。
判别球的种类的算法操作流程如图5所示,具体步骤为:
步骤1:拍摄篮球排球足球每个样本200张图片作为数据集。
步骤2:将图片尺寸转换为224×224×3,并将图片数据归一化,使图片向量值压缩至[0,1]区间内。
步骤3:基于VGG-16网络框架,加入输出为256的全连接层,用3标签的softmax分类器替换原来的VGG-16分类器。
步骤4:使用VGG-16的模型参数,保持13个卷积层和池化层的参数不变,将VGG-16的最后一个池化层输出连接自己的全连接层以及使用3标签的softmax分类器作为本框架的分类器。
步骤5:冻结VGG-16的前13个卷积层和池化层参数,训练一个全连接层和softmax分类器。
权重从而实现本系统的球类分类模型。
VGG模型训练结果:迭代30次后模型衡量指标:训练损失值loss等于7.5163e-04,训练准确率acc等于1,预测损失值val_loss等于7.7697e-04,预测准确率val_acc等于1。
5 结论
本文先用彩色图像转灰色图像方法以减少处理时长,再用均值滤波算法减少噪声对图片的干扰,基于单目测距方法测量目标的距离,采用VGG网络模型识别球的种类。系统整体算法简单,准确率高。
参考文献:
[1] 郭天天,杜耀志.基于颜色轮廓的多边形识别及FPGA实现[J].工业控制计算机,2020,33(9):86-88.
[2] 郜伟雪.浅析图像降噪的算法研究[J].无线互联科技,2016(21):121-122.
[3] 李源熠.基于深度学习的图片匹配算法实现[D].北京:北京交通大学,2018.
【通联编辑:梁书】
