大跨度连续梁线形监控信息化系统设计及应用
2021-07-19王明刚
李 强 王明刚
(中铁四局集团第五工程有限公司,江西九江 332000)
在大跨度连续梁施工过程中,受施工精度、材料特性、施工环境的诸多因素影响,实际施工线形和受力状态与设计理论值会存在一定偏差。为保证连续梁结构安全,确保其顺利合龙及成桥线形符合设计要求,需对连续梁施工过程进行线形监控、实时纠偏[1-4]。
在连续梁顺利合龙后,受温度、自重、荷载等因素影响,梁体混凝土将会产生一定程度的徐变,从而引起桥梁上拱或下挠,利用成桥后的徐变观测数据可对桥梁进行全方位的评估,也可为后续运营健康提供依据。
目前,国内外已有多座桥梁安装了成桥运营阶段的健康监测系统,但在桥梁施工阶段,则很少投入类似的在线监测系统[5]。随着近年来智慧建造概念提出,桥梁施工信息化也成为必然发展趋势,信息化系统具备实时采集、远程控制等优点,可解决传统施工测量费时费力、数据反馈周期长、测量精度受人为影响大等缺陷。
1 传统连续梁线形监控方法
目前,在大跨度连续梁施工过程中,常用的线形监控方法有全站仪三角高程测量法、水准仪几何水准测量法[6],这些方法操作繁琐、现场计算工作量大、数据反馈周期长,从而导致测量工作效率低下,测量结果精度偏低。
数据采集后,运用MIDAS、ANSYS等进行结构建模有限元分析,一般采用1个时点的数据作为分析依据,若分析数据不够充分,则存在一定的风险[7],常出现因监测问题影响工期的情况。
对于连续梁合龙后的徐变监测,因其监测周期长、监测频率高,而常规测量方法受阳光、温度等环境影响较大,且监测人员上桥测量时需通过简易塔吊等提升设备,存在较大的安全风险。
2 连续梁线形监控信息化系统组成及功能
2.1 系统整体组成
为建立经济、实用、可靠、精确的数字化数据高速采集系统,应从数据采集、数据传输到控制决策实现高度智能化与全过程自动控制,能满足铁路大跨度连续梁桥对施工控制的高精度、高效率与实时化需要[8]。
连续梁线形监控信息化系统由自动化采集模块、数据传输模块、数据处理平台3部分组成,见图1。

图1 系统组成
由于采集传感器布置较为分散,故各自设置了传输模块,应力传感器采集的应力数据,静力水准仪采集的已施工段数据均通过无线传输到后台,决策中心指令通过无线发送到前端测量机器人,整个系统可实现动态量测、数据处理,并指导现场测量放样控制和偏差调整[9]。
2.2 各模块组成及功能
(1)自动化采集模块
数据采集手段是连续梁自动化测量系统得以实施的关键,不仅要考虑采集端的灵敏度,采集数据的精度,还要综合考虑现场布设的可实施性、干扰因素、经济成本等方面[10]。
通过技术调研,比选了多种采集设备,最终选择组合采集模块(包括静力水准仪、应变传感器、测量机器人等)。
静力水准系统采用一体化模块化的自动采集单元[11],并通过无线数据传输,实时传送到计算机云端,实现整个沉降观测数据的自动化采集,静力水准系统见图2。

图2 静力水准系统
应变传感器实现应力数据的自动采集,传感器振弦应变量及受温度影响应在±0.01℃精度范围内,应力传感器见图3。

图3 应力传感器元器件
(2)数据传输模块
开发远程双向传输控制软件,使施工控制中心通过网络将桥梁施工现场的监测计算机连接起来,实现数据、文件的双向传输,并保证网络与数据安全[12]。数据传输模块是利用无线模块上已经集成Si4432外围射频电路,操作主控制器的SPI口对Si4432寄存器进行读写,即可完成无线通信功能。
(3)数据处理平台
在大跨度桥梁施工控制中,应建立智能化控制决策专家系统和施工控制知识库,施工控制决策系统,以实时动态的图像控制结构获取施工控制数据,以及演示和控制施工的过程。数据处理模块主要实现数据分析,包括以下功能。
①计算各类线形任意里程桩号的中线和边桩设计坐标;计算结构物特征点的设计坐标;计算线路任意里程桩号的中线设计高程,连续梁顶面任意位置的设计高程。
②梁各节段在不同温度、应力、配重、自重及张拉前后等不同条件下的结构计算分析,与桥梁博士、MIDAS软件、ANSYS软件有限元分析软件数据接口,最终提供连续梁各节段模板的立模高程修正值。
③计算测量机器人在施工现场任意设站的测站点三维坐标及定向方位角;实时计算各节段立模控制点的坐标,同时根据数据分析软件提供的各节段立模高程修正值,实时计算各节段立模控制点的高程;控制测量机器人进行现场放工放样及偏差调整。
④挂篮监测数据处理,包括结构的应力,倾斜、变形曲线。
⑤桥梁工后徐变观测数据处理分析,变形曲线生成。
3 系统原理
3.1 连续梁线形监控信息化系统工作原理
现场倾角静力水准仪、应变传感器可采集已施工节段上控制标志的测量数据,并实时上传到后台控制中心;然后,对数据进行计算分析,结合设计线形数据,在人工建模进行有限元分析的基础上,自动计算下一节段控制标志的中线位置数据及立模高程数据,并实时传送到现场的测量机器人;高精度全站仪对各监测标志跟踪测量,并实时将施工中测量偏差反馈,从而达到连续梁施工过程中实时、高效、准确的线形监控,确保施工过程中的质量和结构安全。
其工作原理见图4。
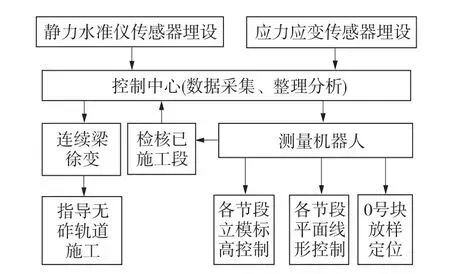
图4 连续梁监测系统原理示意
3.2 连续梁工况分析
在连续梁施工前,为确保成桥线形与设计线形一致,通过施工工序、设计参数分析各工况下连续梁结构受力状况[13],在此基础上,进行施工各阶段的控制,使其满足设计线形和结构受力的要求。
桥梁设计文件中,通常只包含最终的桥梁线形和内力状态,而在各个中间施工状态,则缺乏相应的控制目标。为确定施工阶段各状态的理论控制值,需要进行逆向分析,从成桥状态开始逐步倒推各个阶段施工时的理论控制值。建模分析时,对成桥模型上进行反向拆除,分析每个拆除部分对剩余结构影响,从而得到各个工况状态下的结构位置和受力的状况[14],作为施工各阶段控制的理论目标值。
在施工推进过程中,梁的结构形式、荷载状况以及边界约束条件等都是动态变化的,在混凝土收缩徐变作用下,已施工段空间位置会发生偏移[15],在分析下一节段时,应充分考虑本节段结构状态,进而逐一的对后续节段进行理论分析计算。计算流程见图5。

图5 连续梁分析计算流程
需要对初始状态、零号块施工、每节段悬臂浇筑、边跨合龙、中跨合龙、后续二期恒载几个阶段进行分析,通过理论计算分析获取到主梁高程、施工各节段理论值、各个节段的模板高程。
3.3 节段模板高程计算
在连续梁悬臂浇筑法施工中,当从零号块向两端进行对称挂篮施工时,考虑到每节段梁的自重、混凝土自身性能引起的形变等诸多因素影响,梁的线形需在设计线形上设置一定的预拱度,以抵消挠度变形的影响,施工每一节段,都需要根据现场的实际情况进行动态的控制,以确保建成后桥梁的线形与设计线形的一致性。
在计算立模高程时,需要考虑的计算因素包括:该节段设计高程、节段自重、节段预应力、混凝土收缩徐变、施工临时荷载、使用荷载、挂篮变形等,其中,节段自重、节段预应力、混凝土收缩徐变、施工临时荷载、使用荷载通过理论分析获得,挂篮变形值通过现场试验得到。立模高程计算公式为

式中,Hlm为该节段立模高程;Hsj为该节段设计高程;∑f为节段自重、节段预应力、混凝土收缩徐变、施工临时荷载、使用荷载几项引起挠度的总和;fgl为挂篮变形值。
4 工程实例
4.1 项目介绍
新建郑万高铁湖北段白河双线特大桥采用(72+128+72)m混凝土连续梁,其梁体截面为单箱单室、变高度、变截面箱梁,底板、腹板、顶板局部向内侧加厚,均按折线变化,全联在端支点、中支点处设置横隔板,横隔板设置检查孔洞。防护墙内侧净宽9.0m,梁宽12.6m,桥梁建筑总宽12.9m,梁全长273.6m,计算跨度为(72+128+72)m,中支点截面中心线处梁高10.0m。跨中18m直线段与边跨17.8m直线段截面中心线处梁高5.5m;梁底下缘按二次抛物线变化。箱底宽6.7m,顶板厚45cm,底板厚48~100cm,腹板厚40~90cm,腹板按折线变化,底板厚度按二次抛物线变化。边支座中心距梁端0.8m,中支座、端支座横向中心距均为5.7m。
4.2 测量元器件布置
大跨度桥梁监测点位置和数量通过理论计算分析来确定,首先应进行优化分析,尽量将传感器布置于最合理的位置,以减少传感器设备的数量。挠度观测点布置见图6、图7。
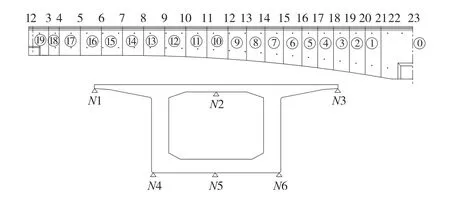
图6 桥梁挠度测点布置

图7 桥梁应力监测测点布置
元器件布置包括全站仪观测标志、应力传感器和静力水准仪传感器埋设,以及管道安装等。静力水准仪布置见图8。

图8 静力水准现场布置
挂篮应力观测装置布置见图9。

图9 挂篮应力观测装置布置
以网络为媒介,实现数据双向网络传输,将桥梁施工现场与桥梁施工控制研究中心紧密衔接,以实现测试数据高速传输与控制指令的网络发布。高精度全站仪跟踪测量见图10。

图10 高精度全站仪跟踪测量各监测标志
4.3 数据响应系统
建立了一个完善的大跨度桥梁信息化施工监测控制管理系统,以实现从数据采集、数据传输到控制决策高度智能化与全过程自动控制,以及满足铁路大跨度连续梁桥对施工控制的高精度、高效率与实时化的需要。施工阶段建模分析见图11、图12。
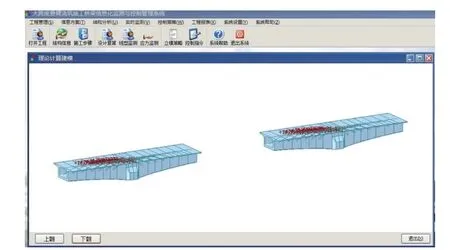
图11 建模分析
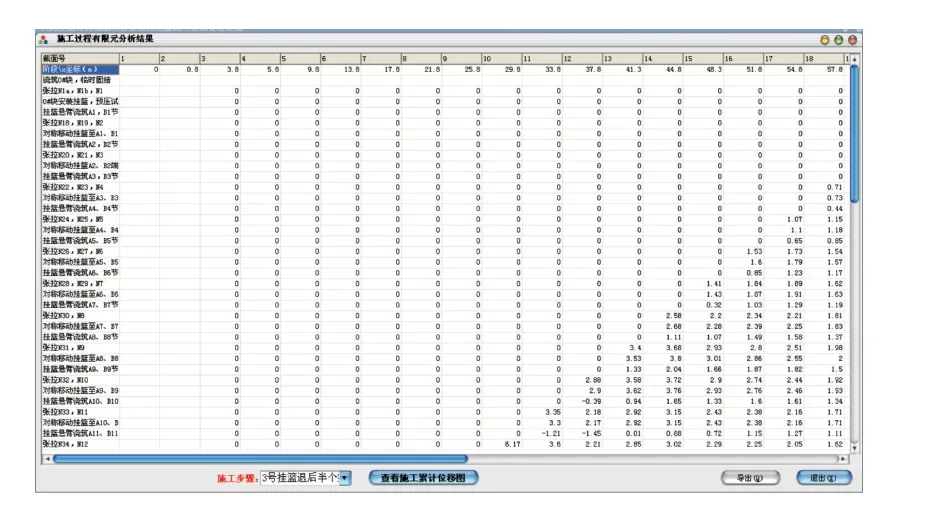
图12 施工过程有限元分析结果
该系统可以直接关联有限元模拟计算结果,再运用施工控制原理性知识和经验性知识,建立连续梁桥的施工控制决策专家系统,实现依据数据分析决策。
通过现场数据采集、理论计算,得到桥梁节段高程偏差值,以实时掌握测量数据的真实性,见图13。

图13 高程监测
应力传感器可实时采集挂篮各部件受力情况,并及时传入系统,确保施工安全,见图14。

图14 应力观测数据
桥梁合龙后,静力水准系统持续对桥梁徐变进行数据采集,判断桥梁健康状况,工后徐变情况见图15、表1。
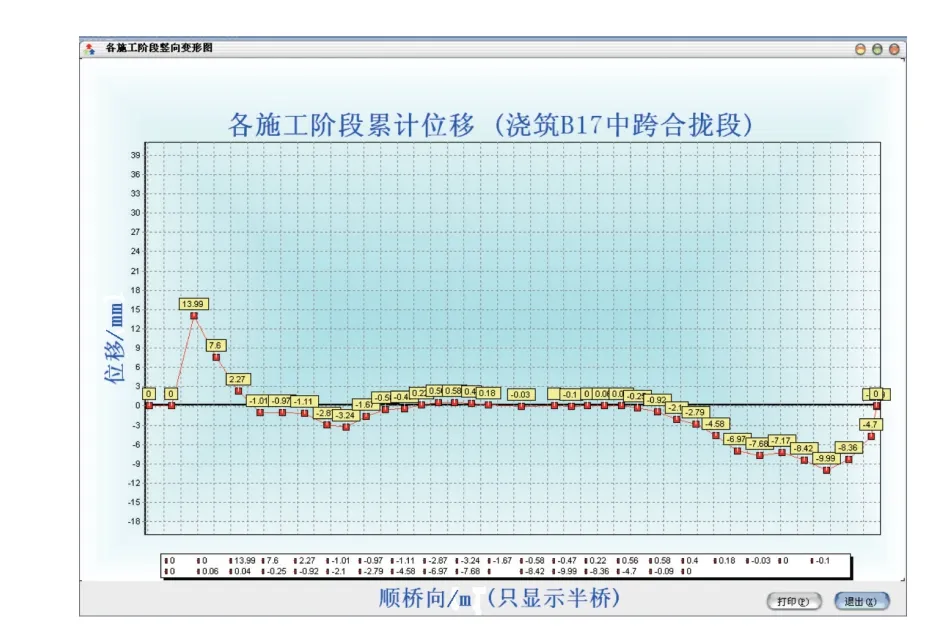
图15 桥梁徐变观测数据
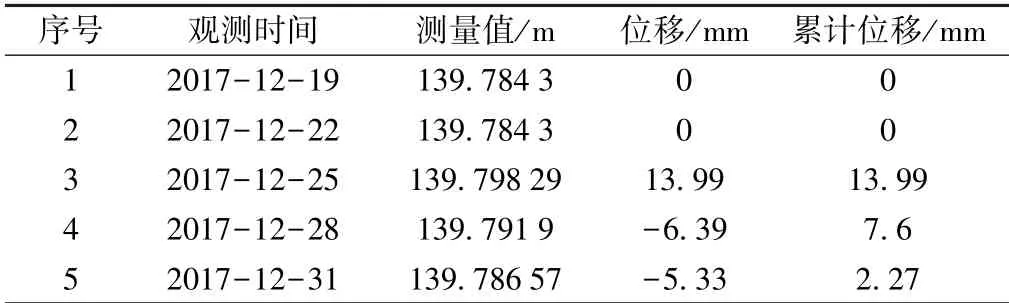
表1 B17跨中观测数据

续表1
由图15、表1可知,桥梁在合龙后会持续发生徐变,可通过数据进一步分析桥梁变形趋势和影响因素等。
4.4 施工精度控制
根据TB 10752—2018《高速铁路桥涵工程施工质量验收标准》和Q/CR 9603—2015《高速铁路桥涵工程施工技术规程》中的控制要求,连续梁线形监测控制的目标值为:成桥后连续梁底面线形偏差值±3cm以内;挂篮定位高程与预报高程之差控制在±0.3cm以内;每个节段箱梁浇注完成后,顶面平整度误差小于1cm;箱梁轴线误差小于±1cm。
预应力索张拉完后,若梁端测点高程与监控方预报高程之差超过±2cm,需分析误差原因并制定下一步调整措施;每节段的轴线施工前应进行复核,动态控制平面线形,确保平面线形与设计线形偏差在±2cm以内。
5 结语
介绍一种大跨度连续梁施工测量自动化系统,可实现测量数据实传送、计算、分析等,提高了工效,减轻了人工计算的工作量,减少出错概率。但该系统还存在一些问题需要解决。
(1)静力水准仪的灵敏度受温度存在一定的影响,特别是在气温很低的时候,静力水准仪经常出不来数,下一步将研发外盒,降低其受气温的影响。
(2)常用的MIDAS、ANSYS等进行结构建模有限元分析的软件暂时没有办法集成到管理系统中作为模块调用,降低了整个系统的整体性。也是下一步需要克服的主要技术难点。
(3)利用全站仪进行自动化控制时,仪器架设的位置,如何实现固定形式的观测,如何保护还需要进一步摸索。