“天问一号”探测器舱体抛离试验系统设计与验证
2021-07-19冯伟易旺民杨旺李群智侯森浩郑圣余孟凡伟
冯伟 易旺民 杨旺 李群智 侯森浩 郑圣余 孟凡伟
“天问一号”探测器舱体抛离试验系统设计与验证
冯伟1,2易旺民1,2杨旺1李群智3侯森浩4郑圣余1,2孟凡伟1,2
(1 北京卫星环境工程研究所,北京 100094)(2北京市航天产品智能装配技术与装备工程技术研究中心,北京 100094)(3北京空间飞行器总体设计部,北京 100094)(4清华大学机械工程系,北京 100084)
火星探测器防热大底和背罩的高速抛离是进入、下降、着陆过程中的关键环节之一,需在地面开展有效的试验验证。文章针对抛防热大底、抛背罩地面试验中高速度、高加速度跟随和空间力、力矩耦合施加问题,提出了采用电机驱动的主动式分离方案和空间力、力矩的耦合控制方法,设计了试验系统并建立了动力学模型,分别开展了仿真和试验验证。试验结果表明,大底和背罩分离过程中的受力状态得到准确施加,且与仿真结果基本吻合,验证了分离方案的可行性。该试验方法有效验证了火星探测器大底和背罩抛离过程的机械安全性,也为其他航天器的分离试验提供了有益参考。
分离试验 电机驱动 绳索提升 防热大底 背罩 火星探测器 天问一号
0 引言
火星探测器进入、减速和着陆(Entry,descent and landing,EDL)火星的过程完全自主,需在7~10min内从约20 000km/h的130km高空安全着陆到火星表面,是火星探测实施过程的关键环节[1-2]。迄今为止火星表面着陆任务中,前苏联、美国、欧洲、中国先后共计进行了19次火星着陆尝试,完全成功的仅有9次,成功率不足50%,而5次任务失败都发生在EDL过程中,很大程度上是由于EDL技术验证不充分[3-4],完全确切验证抛大底和抛背罩过程的技术难度较大。
目前,国际上进行火星进入舱着陆过程验证的主要研究方法有数值仿真、高空抛伞试验、风洞试验等。美国NASA最早开展了有关火星进入舱地面验证的相关研究,当时“海盗”(Viking)1号和2号、“火星探路者号”(Mars Pathfinder)都是通过计算流体力学来进行力学分析[5-7];美国“探索漫游者号”(Mars Exploration Rovers)采用分离弹簧弹开的设计,使用由NASA兰利研究中心开发和维护的全过程数学仿真验证软件系统POST2对大底分离的全过程进行了仿真[8-10],以便观察大底弹开后是否产生二次碰撞;欧洲航天局的ExoMars在研制过程中采用点对点的仿真手段对整个着陆过程进行了仿真分析[11];中国航天空气动力技术研究院对火星着陆器背罩分离进行了气动特性研究[12-14],获得了着陆平台与背罩的轴向力随间距变化的规律。由于地面模拟分离试验系统庞大且复杂,搭建困难,仿真验证在一定程度上缓解了地面试验模拟耗资巨大的难题,但无法获得地面试验数据。1972年美国“海盗号”降落伞研制期间,开展了数次高空抛大底试验[15],高空试验可验证大底抛离的全过程,但需要在距离地面约35km的高空展开试验,成本高昂,周期长,风险大,适用于全过程验证试验;“海盗号”还开展了风洞试验[16],针对背罩抛离过程中受空气动力学影响的回吸力进行测试。欧洲航天局对ExoMar在抛大底过程中的风洞试验进行了验证[17],风洞模拟分离试验的周期短,但由于背罩分离装置很难按照真实技术状态进行缩比,试验结果会产生一定误差。结合抛大底抛背罩试验要求和我国试验条件,我国首颗火星着陆探测器采用室内分离的试验方案,试验方法主要有悬吊解锁分离法、摆式分离法和自由落体分离法[18-21]。其中悬吊解锁分离是将分离部件用吊车吊起,待分离信号触发后,适配器与航天器开始分离;摆式分离法是将分离部件水平放置,上方用绳索吊挂进行分离;自由落体分离法是将试验件从一定高度释放,然后按照规定的时序进行分离。室内分离试验虽然很难模拟火星的大气环境,但由于大气环境对背罩短期分离过程中的受力状态影响不大,试验系统稳定、可靠、可操作性强、周期短;同时由于背罩抛离的加速度达到14m/s2,本文拟采用吊挂伺服电机牵拉式的分离方案。
针对“天问一号”火星探测器大底、背罩的分离试验需求,本文分析了结构受力等效情况,提出电机主动式分离的方法和空间力、力矩耦合控制方法,对地面模拟分离系统的机械结构进行设计,搭建分离系统动力学模型,开展大底、背罩与进入舱的分离试验,并采集了相关试验数据,对分离方案及关键技术进行验证。
1 抛离试验方案设计
1.1 抛离试验要求
“天问一号”着陆巡视器由背罩、火星车、着陆平台和大底组成,着陆火星表面EDL的主要过程包括大气进入、超声速开伞、大底抛离、展开着陆缓冲机构、背罩抛离、发动机点火、悬停避让、火面着陆,具体如图1所示[23]。抛大底/抛背罩试验就是模拟着陆巡视器在EDL过程中大底和背罩的分离过程,以验证着陆巡视器结构设计。

图1 着陆巡视器EDL过程示意
抛大底/抛背罩过程中分离和被分离舱体均在运动,且受到气动耦合作用,抛大底/抛背罩试验主要模拟在轨分离的速度、分离的机械导程和运动方向,设计提出的分离试验主要技术指标要求如图2所示。

图2 大底抛离和背罩抛离时序及试验要求
抛大底/抛背罩分离试验受到的影响因素较多,约束条件也多,比如:分离过程中在大底与着陆平台下表面设备之间的最小安全间距仅有16mm;分离过程气流为不稳定流场,易产生气动耦合的吸力作用,对分离机构产生气动阻力;受气动减速、降落伞初期减速环节影响,分离的初始条件存在概率散布,需包络其极限工况开展试验,地面验证难以真实覆盖在轨使用条件等。为了使试验能够覆盖在轨状态,抛大底/抛背罩试验中应设计4个工况:1)标称工况,所有随机参数均取分布的标称值或者均值;2)下限极限工况,将对大底/背罩分离影响较大的参数取最良好的情况,其他参数取标称值;3)上限极限工况,将对大底分离影响较大的参数取最恶劣的情况,其他参数取标称值;4)校核工况,在上极限工况的基础上,试验时将舱段间的分离电连接器连接。
1.2 抛离过程受力等效性分析
火星探测器着陆过程中抛大底/抛背罩与地面模拟试验有一定的区别:大底、背罩与平台在轨分离的运动方向与火面有一定的倾角,与重力方向不一致,地面试验大底、背罩的分离运动方向与重力方向一致;地面试验与在轨重力加速度不同,地面为1n,火星重力加速度约0.38n。鉴于上述区别,试验系统设计时应首先考虑分离过程大底或者背罩的受力状态的等效性问题。以背罩抛离为例,分析在轨真实环境背罩分离前后,背罩和火星探测器本体(着陆平台及火星车组合体,后文简称着陆平台)的受力状态,如图3所示。

图3 背罩抛离在轨受力状态
火工品弹射分界面受力ab为内力。在短期分离过程(约1s)中,背罩在轨分离时其受力包括:降落伞对背罩的拉力pb;火星大气对背罩的轴向阻力b;火星大气对背罩的法向阻力b;背罩的火星重力b;背罩的气动转矩bmzg。着陆平台受力包括:火星大气对着陆平台的轴向阻力a;火星大气对着陆平台的法向阻力a;着陆平台的火星重力a;着陆平台的气动转矩amzg。其他方向的受力与力矩初步界定为小量,分析时予以忽略。
因地面试验与在轨时的重力加速度不同,需要对地面试验系统进行重力补偿。背罩抛离地面试验受力状态如图4所示,着陆平台固定,背罩模拟相对运动状态。试验吊具与背罩固连,试件质量增加,转动惯量(质心坐标系)增加,该部分增加质量和转动惯量所引起的试验影响通过地面试验系统进行补偿,补偿后保证作用在试件上的受力状态与在轨(仿真)状态保持一致。
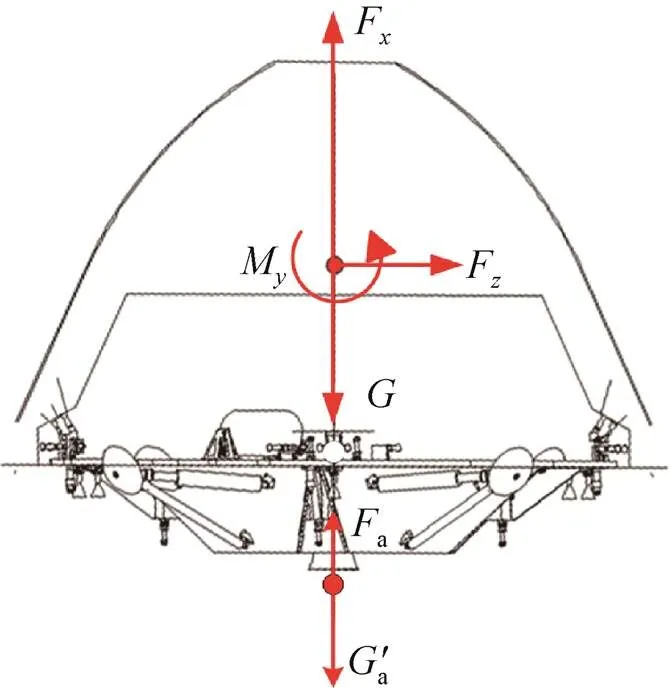
图4 背罩抛离地面试验中受力状态

分离前,背罩轴向力、法向力和转矩的地面试验与在轨受力状态一致,具体受力分析为

式中为法向阻力b与火星重力b的夹角。
分离后,背罩与着陆平台之间不存在内力ab,受力分析如下

从式(2)可以看出,地面试验时,背罩的地球重力通过F进行补偿后,轴向力(F–)、法向力F和转矩M均与在轨受力状态一致。
1.3 方案设计
火星探测器抛大底/背罩试验,相对于“神舟飞船”、月球探测器等任务过程中的相关试验有两处显著的特点:首先,火工品瞬时起爆后要求在高速运动状态下加速分离,尤其是抛大底试验,要求在28ms实现6m/s运动的基础上继续加速运动,即要求试验系统具有很高的瞬时响应运动能力;其次,分离运动的加速度高,抛大底的加速度为5.0m/s2,而抛背罩的加速度为14m/s2,抛背罩的加速度超过重力加速度,传统的被动式试验方案已经无法实现。
对比吊挂配平被动方式,吊挂配平被动为主、主动为辅方式,以及吊挂配平伺服控制主动方式三种吊挂式试验方案,其中被动式方案轴向加速度小于1n,非恒定值;被动为主、主动为辅方式起爆时间与控制时间难以同步;伺服控制主动方式控制系统复杂,但是跟随速度快,施加的加速度可大于1n。综合考虑,主动式方案可满足试验需求。主动式地面试验系统的核心为大功率电机驱动模块,为了降低对电机性能的要求,可以将连接主绳松弛一段长度,在火工品起爆前使电机提前加速运动,主绳末端获得在火工品起爆后与大底相同的速度,进而实现大底的加速分离试验。

图5 抛离舱体力、力矩施力装置示意
通过等效力分析得出,试验系统不仅需要有轴向拉升能力,同时还具备施加法向力和转矩力的能力。本文提出的试验系统主要施力装置如图5所示,因舱体的法向力、转动力矩与轴向力之间不存在简单线性耦合关系,轴向力通过伺服电机牵拉向上运动,法向力牵拉弹簧组件用于大底(背罩)法向力的施加;转矩力牵拉弹簧组件用于大底(背罩)法向力的施加。
抛离试验系统需要实现背罩、大底的轴向分离的轴线力和运动要求,且可以施加法向力和转矩力。整个系统包括轴向力伺服电机组件、法向力和转矩力加载系统、拉力测量系统和总体控制系统。本文采用双电机垂直索拉升系统实现背罩的轴向高动态运行特性要求;通过控制器实现伺服电机的精确实时运动控制;采用空气弹簧配合扭矩限制离合器的法向及转矩加载方式,以满足系统的加载性能要求,在各加载端都串接有高动态力传感器,可以实现各加载力的实时精确测量,确保试验过程中的完整、精确记录。
2 模型建立及分析
开展地面试验前,利用Adams动力学软件建立背罩、大底分离过程仿真预示模型,模型由绳系系统、弹簧系统、吊具、大底、背罩和着陆平台组成,所建立的背罩分离模型如图6所示,其中+方向为背罩分离方向,也是轴向力施加方向;+为法向力施加方向;+向与+、+成右手法则。以背罩分离过程为例,其力学模拟情况主要包括:着陆平台置于地面架车上;绳系系统、弹簧系统与背罩吊具模型相连接,实现背罩的平动和转动;绳系系统通过一个定滑轮,给系统轴向+方向提供拉力;弹簧系统分别位于背罩的±侧,提供-方向侧向力和绕方向的扭矩。
对背罩仿真模型进行设置,主要包括:背罩质量属性、外部力学输入条件。其中背罩质量特性如下:背罩总质量2.453 000 0×102kg,相对于着陆巡视器机械坐标系的质心坐标(,,):(9.290 000× 102, 0.000 000 0, –1.260 000 0×102)mm;相对于背罩质心坐标系,,三个方向的惯性:3.323 000 0× 108、3.392 000 0×108、3.280 000 0×108kg·mm2。

图6 背罩分离动力学模型

图7 背罩标况下轴向加速度输入

图8 背罩标况碰撞检测最小距离
图注:1)干涉风险点1,发动机支架1A;2)干涉风险点2,发动机支架1B;3)干涉风险点3,发动机支架2A;4)干涉风险点4,发动机支架2B;5)干涉风险点5,发动机支架3A;6)干涉风险点6,发动机支架3B;7)干涉风险点7,发动机支架4A;8)干涉风险点8,发动机支架4B;9)干涉风险点9,++象限足垫位置;10)干涉风险点10,+–象限足垫位置;11)干涉风险点11,––象限足垫位置;12)干涉风险点12,–+象限足垫位置
以背罩标况为例,外部条件输入如下:轴向加速度值如图7所示(图中时间为从开伞算起的整个仿真过程中的一段),法向加速度为–3m/s2,角加速度值为85(°)/s2。
动力学仿真的关键是舱体抛离过程的干涉检测。将大底和背罩在分离中的真实承载(仿真结果)情况作为轴向力、法向力和转矩的输入,为了保证动力学仿真的真实性,设置了标准、上限和下限的仿真条件。碰撞检测采用几何检测的方法,监测部件的相对距离。仿真结果表明,分离过程中大底分离0.1s、背罩分离0.5s内均无碰撞发生。以背罩分离标况为例,背罩分离0.5s内其碰撞最小距离如图8所示,分离距离始终大于0,说明分离过程中无碰撞发生。
3 试验验证
3.1 系统搭建
试验系统主要由试验平台、试验吊具系统、力学测量系统、高速摄影测量系统、试验产品模拟件、试验辅助系统等6部分组成。试验平台为吊挂舱体分离过程提供轴向力随动施加、法向力和转动力矩施加等功能,并能够测量各个方向施加力;试验吊具系统主要负责2种分离工况下吊挂舱体的分离起吊、吊具与吊挂舱体连接(吊点通过质心),试验吊具通过吊装接口与试验平台连接,进行正式试验和利用模拟件调试前,需将吊具与产品及模拟件进行质测;测量系统中的冲击测量系统,可以测量吊挂舱体和固定舱体分离面及其他测量点的冲击响应,并进行数据处理,应变测量系统主要对系统关键部件应变进行测量;高速摄影测量系统负责测量大底、背罩的分离速度、角速度、姿态角,记录分离过程;试验辅助系统主要包括试验过程中使用的辅助工装与设备以及防坠落防护装置;产品模拟件是质量特性与受力特性与真实产品相近的模拟件,用于调试试验系统。试验采用dSPACE控制器,电机控制模式为力矩控制,绳索末端轴向力由力传感器测得。
3.2 试验过程及结果
采用本文试验方法分别开展了真实火星探测器的背罩分离和大底分离试验,试验分上限、标况、下限和校核的4个工况进行,试验结果均满足指标要求。其中背罩标况的轴向索力、上转矩力、下转矩力以及法向力通过力学传感器获得,试验结果如图9~12所示。
通过图9~12得出标况下上扭矩力、下扭矩力、法向力和主索力的试验均值和理论值的偏差,可以发现偏差不大于10%。

图9 背罩标称工况主索索力曲线

图10 背罩标称工况上扭矩力

图11 背罩标称工况下扭矩力

图12 背罩标称工况法向力
3.3 结果分析
本试验系统的目的是通过索驱动机构模拟防热大底分离和背罩分离时的运动状态和受力状态,防热大底和背罩分离试验过程中绳索索力的准确施加是试验成功的关键。如图13所示,本试验系统可等效为一个由4组弹簧阻尼组成的柔性系统。控制模式主要为力矩控制,通过电机驱动绳索对防热大底和背罩施加分离力,使其高速分离。然而,由于绳索单向受力的特点和框架的固有特性,使得本试验系统的主索索力、法向力和扰动力矩的施加与理论值有一定的偏差,均会对试验结果产生影响。试验系统对在轨分离验证的这些影响可通过实际系统施加的力和力矩的程度与理论值之间的比较得出。由图9可知,主索索力比理论给定的索力波动更大,这是绳索和框架系统的固有特性造成的。如图10~12所示,法向力和扭矩力的实际索力平均值大于理论给定的平均值,说明该试验工况下法向力和扭矩力的施加要比真实在轨工况下的更大。在此试验状态下防热大底和背罩若能分离,即可证明真实在轨工况下防热大底和背罩也可顺利分离。

图13 索机构等效弹簧阻尼系统
4 结束语
本文针对“天问一号”火星探测器在EDL过程中大底、背罩抛离的关键环节开展了地面模拟试验研究,研制了火星探测器大底、背罩的地面模拟分离系统,并完成了相关的试验。试验过程中测量的数据完整有效,背罩、大底在短期分离过程中的受力状态得到了准确施加,产品结构外观未发现异常现象;试验中大底/背罩与产品未发生碰撞,结构未出现损坏或塑性变形,在轨可实现无磕碰分离;验证了分离方案的可行性问题,解决并验证了我国火星探测任务EDL过程抛离大底、背罩的关键技术。
[1] BRAUN R D, MANING R M. Mars Exploration Entry, Descent, and Landing Challenges[J]. Journal of Spacecraft and Rockets, 2007, 44(2): 310-323.
[2] 于登云, 孙泽洲, 孟林智, 等. 火星探测发展历程与未来展望[J]. 深空探测学报, 2016, 3(2): 108-113.
YU Dengyun, SUN Zezhou, MENG Linzhi, et al. The Development Process and Prospects for Mars Exploration[J]. Journal of Deep Space Exploration, 2016, 3(2): 108-113. (in Chinese)
[3] 饶炜, 孙泽洲, 孟林智, 等. 火星着陆探测任务关键环节技术途径分析[J]. 深空探测学报, 2016, 3(2): 121-128.
RAO Wei, SUN Zezhou, MENG Linzhi, et al. Analysis and Design for the Mars Entry, Descent and Loading Mission[J]. Journal of Deep Space Exploration, 2016, 3(2): 121-128. (in Chinese)
[4] 郭璠, 李群智, 饶炜, 等. “火星科学实验室”的EDL试验验证技术及启示[J]. 航天器工程, 2018, 27(2): 104-113.
GUO Fan, LI Qunzhi, RAO Wei, et al. Overview and Enlightenment of Mars Science Laboratory’s Entry, Descent and Landing Test Technology[J]. Spacecraft Engineering, 2018, 27(2): 104-113. (in Chinese)
[5] INGOLDBY R N, ICHEL F C, FLAHERTYT M, et al. Entry Data Analysis for Viking Landers 1 and 2 Final Report: NASA CR-159388[R]. 1976.
[6] GNOFFO P A, BRAUN R D. Prediction and Validation of Mars Pathfinder Hypersonic Aerodynamic Data Base[J]. Journal of Spacecraft and Rockets, 1999, 36(3): 367-373.
[7] GNOFFO P A, WEILMUENSTE K J, BRAUN R D, et al. Influence of Sonic-line Location on Mars Pathfinder Probe Aerothermodynamics[J]. Journal of Spacecraft and Rockets, 1996, 33(2): 169-177.
[8] RAISZADEH B, QUEEN E M. Mars Exploration Rover Terminal Descent Mission Modeling and Simulation: AAS 04-271[R]. 2004.
[9] SCHOENENBERGER M, CHEATWOOD F M, DESAI P N. Static Aerodynamics of the Mars Exploration Rover Entry Capsule[C]//Proceedings of 43rd AIAA Aerospace Sciences Meeting and Exhibit. Reno Nevada, USA: AIAA, 2005, 56: 1-12.
[10] RAISZADEH B, DESAI P, MICHELLTREE R. Mars Exploration Rover Heat Shield Recontact Analysis[C]//Proceedings of AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar, Dublin, Ireland, 2011, 2584: 969-985.
[11] BAYLE O, PORTIGLIOTTI S, VENDITTO P, et al. ExoMars-2016 Descent Module EDL Demonstration Mission- Approach to Aerothermodynamic Database Building[C]//Proceedings of 7th European Symposium on Aerothermodynamics. Paris. ESA, 2011.
[12] 张青斌, 丰志伟, 马洋, 等. 火星EDL过程动力学建模与仿真[J]. 宇航学报, 2017, 38(5): 443-450.
ZHANG Qingbin, FENG Zhiwei, MA Yang, et al. Modeling and Simulation of Mars EDL Process[J]. Journal of Astronautics, 2018, 39(9): 953-959. (in Chinese)
[13] 吕俊明, 苗文博, 黄飞, 等. 火星进入的气动力特性预测模型分析[J]. 空间科学学报, 2016, 36(3): 344-351.
LU Junming, MIAO Wenbo, HUANG Fei, et al. Model Analysis for Predicting Aerodynamic Characteristics of Mars Entry[J]. Chinese Journal of Space Science, 2016, 36(3): 344-351. (in Chinese)
[14] 徐国武, 李齐, 周伟江. 火星着陆器抛背罩分离体气动特性[J]. 宇航学报, 2018, 39(9): 953-959.
XU Guowu, LI Qi, ZHOU Weijiang. Aerodynamic Characteristics of Mars Lander Back Shell Separation[J]. Journal of Astronautics, 2018, 39(9): 953-959. (in Chinese)
[15] 李爽, 江秀强. 火星进入减速器技术综述与展望[J]. 航空学报2015, 36(2): 422-440.
LI Shuang, JIANG Xiuqiang. Review and Prospect of Decelerator Technologies for Mars Entry[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(2): 422-440. (in Chinese)
[16] EDQUIST K A. Computations of Viking Lander Capsule Hypersonic Aerodynamics with Comparisons to Ground and Flight Data[C]//Proceedings of AIAA Atmospheric Flight Mechanics Conference and Exhibit. Keystone, Colo, USA: AIAA, 2006: 6137.
[17] NEEB D, GUILHAN A, AUGENSTEIN E. Experimental Study of ExoMars Sub- and Transonic Aerodynamics and Heat Shield Separation in HST[C]//Proceedings of the 7th European Symposium on Aerothermodynamics, 692. Brugge, Belgium: ESA Communications, ESTEC, Noordwijk, The Netherlands, 2011.
[18] 孙泽洲, 张熇, 贾阳, 等. 嫦娥三号探测器地面验证技术[J]. 中国科学: 技术科学, 2014, 44(4): 369-376.
SUN Zezhou, ZHANG He, JIA Yang, et al. Ground Validation Technologies for Chang’E-3 Lunar Spacecraft[J]. Scientia Sinica: Technologica, 2014, 44(4): 369-376. (in Chinese)
[19] 董悫, 郑圣余, 冯伟, 等. 火星探测器分离试验方法研究[J]. 航天器环境工程, 2020, 37(4): 361-368.
DONG Que, ZHENG Shengyu, FENG Wei, et al. Method of Separation Test for Mars Spacecraft[J]. Spacecraft Environment Engineering, 2020, 37(4): 361-368. (in Chinese)
[20] 侯森浩, 唐晓强, 孙海宁, 等. 面向航天器分离的高速索力传递特性[J]. 清华大学学报(自然科学版), 2021, 61(3): 177-182.
HOU Senhao, TANG Xiaoqing, SUN Haining, et al. Transfer Characteristics of High-speed Cable Forces for Spacecraft Separation[J]. Journal of Tsinghua University (Science and Technology), 2021, 61(3): 177-182. (in Chinese)
[21] 齐乃明, 孙康, 王耀兵, 等. 航天器微低重力模拟及试验技术[J]. 宇航学报, 2020, 41(6): 770-779.
QI Naiming, SUN Kang, WANG Yaobing, et al. Micro/Low Gravity Simulation and Experiment Technology for Spacecraft[J]. Journal of Astronautics, 2020, 41(6): 770-779. (in Chinese)
[22] 高海波, 牛福亮, 刘振, 等. 悬吊式微低重力环境模拟技术研究现状与展望[J]. 航空学报, 2021, 42(1): 80-99.
GAO Haibo, NIU Fuliang, LIU Zhen, et al. Suspended Micro-low Gravity Environment Simulation Technology: Status Quo and Prospect[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 80-99. (in Chinese)
[23] HOU Senhao, SUN Haining, LI Qunzhi,et al. Design and Experimental Validation of a Disturbing Force Application Unit for Simulating Spacecraft Separation[J]. Aerospace Science & Technology,2021(113): 106674.
Design and Verification of Tianwen-1 Probe Cabin Separation Test System
FENG Wei1,2YI Wangmin1,2YANG Wang1LI Qunzhi3HOU Senhao4ZHENG Shengyu1,2MENG Fanwei1,2
(1 Beijing Institute of Spacecraft Environment Engineering, Beijing 100094, China)(2 Beijing Engineering Research Center of the Intelligent Assembly Technology and Equipment for Aerospace Product, Beijing 100094, China)(3 Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)(4 Department of Mechanical Engineering,Tsinghua University,Beijing 100084, China)
The high-speed separation of the heatshield and the aeroshell in the process of Tianwen-1 Mars probe entering, lowering and landing (EDL) should be tested and verified on the ground. For high-speed and high acceleration following, and coupling the spatial force and torque to compose in separation test,the active separation scheme driven by motor and the control method of spring force limiting and torque moment are put forward in this paper. The test system and its dynamic model are established, and the experimental verification is carried out. The test results show that the force state is applied accurately in the separation process of the heatshield and aeroshell, and the results are basically consistent with the simulation results. This test method effectively verifies the mechanical safety of the separation process of the Mars probe's heatshield and aeroshell, and also provides a useful reference for the separation test of other spacecraft.
separation test; motor drive; cable hoisting; heatshield; aeroshell; Mars probe; Tianwen-1
V416.6
A
1009-8518(2021)03-0023-9
10.3969/j.issn.1009-8518.2021.03.003
2021-03-09
国家重大科技专项工程
冯伟, 易旺民, 杨旺, 等. “天问一号”探测器舱体抛离试验系统设计与验证[J]. 航天返回与遥感, 2021, 42(3): 23-31. FENG Wei, YI Wangmin, YANG Wang, et al. Design and Verification of Tianwen-1 Probe Cabin Separation Test System[J]. Spacecraft Recovery & Remote Sensing, 2021, 42(3): 23-31. (in Chinese)
冯伟,男,1982年生,2007年7月获哈尔滨工业大学机械设计及理论专业硕士学位,高级工程师,目前主要从事航天器低重力试验研究、智能化装备及工艺设计工作。E-mail:fengwei_bisee@163.com。
(编辑:夏淑密)