基于模糊神经网络PID的机载蓄电池恒流充电控制
2021-07-17丁羿茗吕瑞强
丁羿茗,吕瑞强,蒋 超
(空军勤务学院,江苏 徐州 221000)
0 引 言
飞机机载蓄电池的主要作用包括以下两点。一是当飞机的主电源发生异常时为电子设备提供电能,二是当飞机的发动机在空中紧急停时发挥作用,重新启动发动机。目前,虽然充电方法有很多,充电的理念也向着智能化发展,但是分阶段充电法结构简单,价格容易接受,因此使用较为广泛,尤其在锂电池的充电中运用地更为频繁。传统的PID控制方法无法使充电电流或电压快速稳定于规定值,因此本文设计了一种控制方法,将模糊控制推理能力和神经网络学习能力结合起来,根据反馈实时调节PID参数的值,从而达到改善PID控制器动态特性和鲁棒性的目的。经验证,该方法可以有效减小电流波动范围和达到目标电流所需要的时间[1]。
1 模糊神经网络控制器
蓄电池的充放电模型很复杂,变量很多,很难建立精确的模型。传统控制方法的精度依赖于建立模型的精度,不能达到满意的控制结果。模糊神经网络可以很好地解决这个问题,不需要精确的数学模型就可以通过蓄电池电流的反馈计算出KP、KI以及KD的变化值。模糊神经网络PID结构示意如图1所示。

图1 模糊神经网络PID结构示意图
1.1 模糊神经网络PID控制器设计
采用增量式PID的算法,增量式算法不会过分依赖前一时刻的误差值,同时运算量适中,延迟的时间较短[2,3]。与位置式算法相比,增量式只需要输出增加值可以避免发生积分失控的情况。增量式算法公式为:

式中,KP、KI、KD分别为比例系数、积分系数以及微分系数。
模糊神经网络结构如图2所示,该模型共分为5层。

图2 模糊神经网络结构图
第一层的节点起到将输入变量传送到下一层的作用,同时输入节点应用语言变量X1=e(t),X2=ec(t)。第二层的节点数表示每一个语言变量具有的语言值的个数,该层的输出是每个语言值的隶属度函数,通常情况下采用钟形函数作为隶属度函数。第三层用来表示模糊规则的匹配,两个输入变量均有7个语言值,因此第三层有49个节点,也就是49条规则。第四层主要实现的是归一化计算,其节点数与第三层相同都是49个。第五层用于计算每一条规则的后件,即每条规则的后件在简化结构中变成了最后一层的连接权,最后的输出是各规则后件的加权和,结构中只有一个输出,但在实际的求解中会有3个输出,最终求得的KP、KI以及KD为:

式中,σji(5)表示第五层输出变量各语言值的隶属度中心宽度。
1.2 模糊神经网络的学习算法
设置一个寻优的指标函数,让它取最大值来修改相应的隶属度函数中心值和宽度[4,5]。寻优指标函数如下所示,将模糊神经网络的期望输出和实际输出相减再取平方,用其倒数的1/2作为寻优函数,令其取最大值,即:

式中,y(t)为当前时刻的期望系统输出;y(t)为当前时刻的模糊神经网络实际输出。

式中,η为学习因子,模糊神经网络某一权值W的修改函数为:

2 蓄电池系统的神经网络辨识
如果能用蓄电池模型代替实际电池进行试验,那么既可以降低使用电池过程中的安全隐患,也可以减少很多对蓄电池的使用损耗[6]。本文用神经网络对蓄电池充电数据进行拟合,得到了如图3所示的蓄电池的辨识模型。
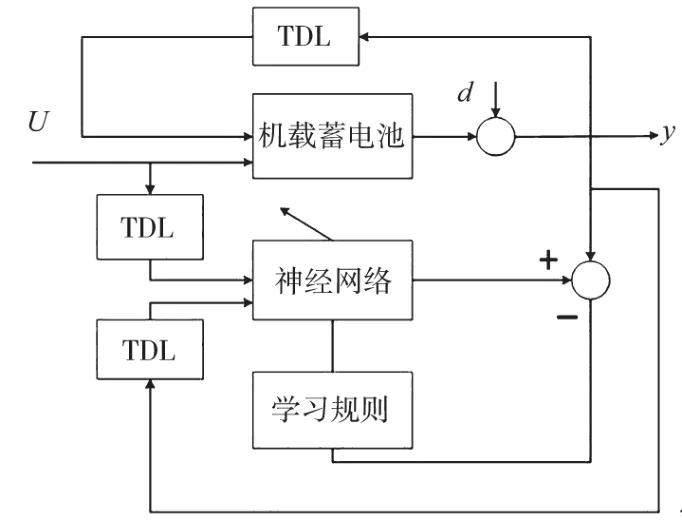
图3 神经网络辨识模型
机载蓄电池是非线性的动态系统,k+1时刻的系统输出依赖于过去n个输出值和过去时刻的m个控制值[7,8]。其通用的非线性动态系统模型如下为:

式中,yN(k+1)为神经网络的输出,f为神经网络的输入输出非线性映射,y(k)是过去n个时刻的输出值,u(k)是过去m个控制值。
本文通过MATLAB软件,选取大量的实验数据作为训练的样本数据,选取3输入3输出作为训练神经网络模型的输入输出神经元个数,选择训练次数为1 000次。根据训练结果可知,在训练1 000次时,平均均方误差达到规定要求,因此可以使用。训练良好的蓄电池模型可以代替实际电池进行仿真实验,大大节省了研究成本。
3 充电结构框图以及主要电路结构
充电结构如图4所示,充电电路采用开关电源技术和半桥电路[9]。交流电源经过整流滤波变为直流电,然后通过半桥电路逆变和高频变压器变压进行二次整流,整流后的电流通过Buck/Boost电路给蓄电池充电。主控制器通过采样电路采集蓄电池的电流电压信息,与目标值进行比较,得到误差,通过设计的算法得出PID的增量值,进一步计算得出需要增加的电流电压值。控制器此时发出脉冲信号,经过驱动电路控制全控器件的通断,从而改变占空比的大小,继而改变充电电流值大小。

图4 充电结构框图
功率校正电路若采用无源的模式,那么电容和电感等器件的使用会使电路的体积过大,因此使用有源功率校正。功率因数计算方法为:

式中,U1为输入电压;I1是交流侧输入基波电流的有效值;I是输入电流的有效值;Φ1是输入电流基波分量与输入电压相位差值;Kd表示畸变因子。功率因数校正基本电路如图5所示,DC-DC变换器加在加在整流部分和滤波部分之间,通过该变换器使输入电流波形逼近输入电压波形,使得电流电压波形一致,减少电流电压之间的相位差,从而达到提高功率因数的目的[10]。

图5 功率因数校正基本电路
交流输入电流经过开关电源变换变为直流电,但是此时的电流不能直接作为蓄电池的充电电流,需要使用Buck/Boost双向功率电路调整电流的大小,并且可以做为蓄电池的放电电路[11]。
4 基于MATLAB模型和实验的仿真验证
模糊神经网络的结构采用两个输入,第一个输入变量为模糊神经网络PID系统输出量与理想输出之间的差值e(t),第二个输入变量为差值e(t)随时间的变化率ec(t)。输出参数有3个,分别是经过模糊神经网络预测出的ΔKP、ΔKI以及ΔKD[12]。使用MATLAB软件,打开模糊神经网络工具箱,将训练数据导入,设置神经网络各层节点数,调整隶属度函数及输出函数类型。模糊神经网络PID训练如图6所示,选择训练误差为0.02,训练次数2 000次。传统PID和模糊神经网络对比图7所示。

图6 模糊神经网络PID训练图

图7 传统PID和模糊神经网络对比图
实验用电池的规格是15 V/20 Ah,充电流程主要采用两段式充电法。先以5 A电流恒流充电,在这个过程中电池的端电压逐渐升高,当达到限定值14 V时,转为充电的第二个阶段,恒压(14 V)限流充电。在这个过程中,电池的充电电流逐渐减小,当下降到限定值0.2 A时,使用0.2 A涓流充电,将电池充满并保持浮充状态。两段式充电法的具体内容如表1所示。

表1 两段式充电法
在恒流和恒压充电段如何精确地实现恒流恒压的控制十分关键。下面将使用Simulink仿真平台进行传统PID、模糊PID以及模糊神经网络PID的对比,结果如图8所示。
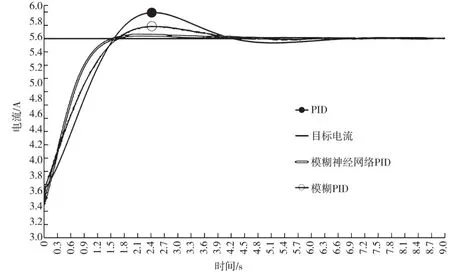
图8 最终仿真图
在图8中,传统PID的仿真结果最大值为5.8 A,超过目标值5 A,超调量为0.8 A,时间大约在8.7 s时达到稳定。而模糊神经网络PID控制器波动的最大值为5.1 A,较少的电流波动,因此可以增加电路的安全性和稳定性,且在5.1 s时稳定在目标值,由此可以看出模糊神经网络PID的各项指标远远优于其他普通PID控制方式。仿真中,电流波动范围和最终稳定时间并不是最优的结果,但是通过比较已经初步可以看出模糊神经网络PID控制器实时修正PID参数,可以使控制的精度更高,稳定时间更短。将3种方式放到一起进行对比可以看出,模糊神经网络PID控制可以更好地控制充电电流的范围,使充电以更安全可靠的方式进行,有更快的控制速度,可以做到更精确地控制[13]。
5 结 论
本文所设计的模糊神经网络PID控制器可以有效提高充电稳定性,使充电电流更快趋于目标值,并且具有较小的超调量,使机载蓄电池以更加安全可靠的方式进行充电。
