基于PSO-PID的超声电源频率跟踪系统设计∗
2021-07-16丁艳华马海乐
丁艳华,郑 宏,肖 凤,马海乐
(1.江苏大学机械工程学院,江苏 镇江 212013;2.江苏大学食品与生物工程学院,江苏 镇江 212013;3.江苏大学电气信息工程学院,江苏 镇江 212013)
目前功率超声已应用于医学检测与治疗、超声清洗、超声辅助制备化工材料、超声生物处理等诸多领域[1-2]。但大部分场所使用的超声波电源存在技术老化,多数采用单纯的模拟控制,存在频率模式单一、频率漂移严重、能耗高、体积大等缺点[3-5]。因此,如何使超声电源将电能最大幅度地转换成声能,作用于超声对象,已成为超声技术的重要课题[6]。已有研究学者将数字控制取代传统超声中常用的模拟电路闭环控制,并发现可使输出频率在负载突变时较好地跟踪超声换能器的频率变化,可减小损耗,提高效率[7]。但是单一的经典比例积分微分(proportional integral derivative,PID)闭环控制参数整定过程繁琐,缺乏较好的实时性和鲁棒性[8],需要不断实时调整参数,难以满足超声电源快速频率跟踪的要求。而粒子群算法在众多的优化算法中由于其稳定可靠、动态适应性强,针对不同的系统可做改进,在闭环控制中应用及其广泛[9]。
本文设计了一种可用于食品原料辅助加工的超声波电源,主电路拓扑为可控硅调节功率结合全桥逆变结构,满足不同条件下的食品物料处理的要求。控制部分采用高速微控制器联合直接数字式频率合成器(digital frequency synthesizer,DDS),频率的快速跟踪采用改进的粒子群算法(particle swarm optimization,PSO)结合PID 闭环控制,使频率跟踪更加快速、精确。
1 主电路拓扑结构
图1 所示为超声波电源主电路的拓扑结构,分为前级整流、中间逆变级和后级阻抗匹配及调谐三个部分。
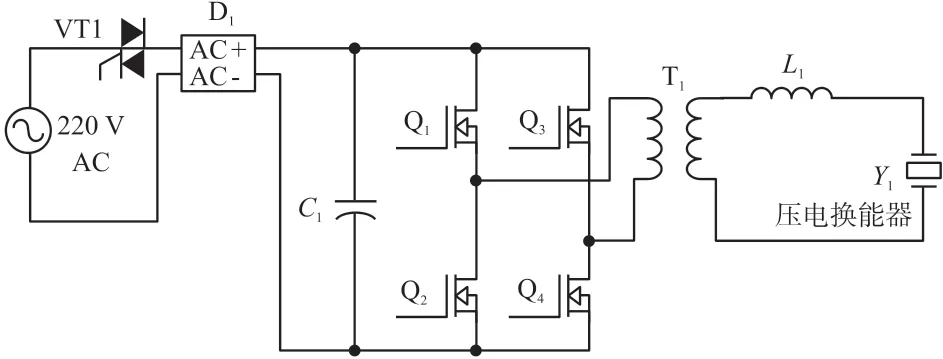
图1 主电路拓扑结构
由于所设计电源要求有较高的实用性和可靠性,针对不同的食品原料可调节到多种功率档位,因此整流部分采用可控硅调功电路,先将工频交流电通过可控硅VT1 的移相脉冲控制输出合适的电压大小,再送入整流桥D1,整流之后经大电容C1滤波即为电压纹波较小的直流电压。因此,提供给逆变级的直流输入电压稳定,调功时连续性好。
逆变部分采用全桥拓扑结构,该结构主要使用半导体开关元件(Q1~Q4)进行电力变换,可有效减小电源体积,输出电压最大值等于输入电压,相比半桥结构输出的功率更大,调节范围更宽。第三部分根据电源功率传输的原理,采用高频变压器T1进行阻抗匹配,使电源向负载侧提供的功率最大化,再利用电感L1搭建串联谐振网络,使等效负载接近纯阻性。
电源工作时,电流在逆变桥臂的四支开关管中斜对角两个为一组(如Q1和Q4为一组,Q2和Q3为一组),两组轮流导通,为了防止上下管直通,驱动信号中设置的死区时间为700 ns,即可以有效防止上管和下管直通又不会造成大的功率损耗,是根据选用的开关管而设计的最佳时间。
2 频率控制设计
频率控制采用数字控制,避免传统模拟控制不稳定、抗干扰能力差的缺点。电路中需要采样电压和电流进行相位比较,进而输出相位误差信号。电压采样用电阻分压的方式,电流采样采用电流互感器,采样值相位延迟较小,相位精确。将采样的电压和电流信号送入运算放大器电路,调理为主控制器可以接受的直流信号,接到主控制器的A/D 采样端。
超声波电源的主控芯片采用微芯公司的DSPIC33F 控制芯片。该控制器集成了单片机控制功能强和DSP 数字信号处理能力强的优点,具有丰富的外围器件和完整的DSP 引擎,并可以直接调用一部分DSP 指令。频率控制采用DSPIC33F 和高速频率合成器 AD9850 共同完成频率的发送。AD9850 是一款低功耗、频率精准、输出范围宽的数字频率合成器,适合于多种电源的频率控制领域。控制系统结构如图2 所示。
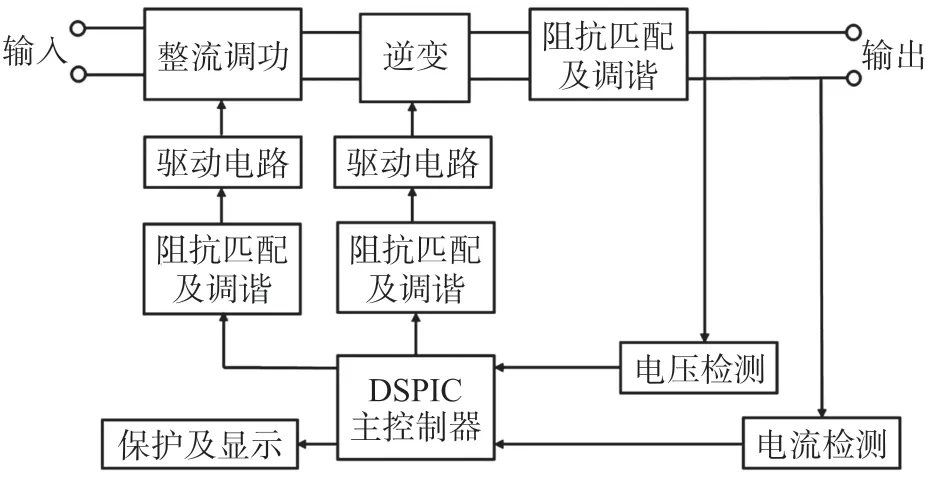
图2 超声电源控制系统结构图
为了使电源在启动后的输出频率能够快速捕捉到换能器的谐振频率,需要对电源逆变部分的四支MOSFET 开关管的驱动信号频率做闭环控制,使其按照超声换能器的实时谐振频率进行调整。PID 控制是闭环控制的经典算法,其结构参数易于设计、计算过程简单,是多数自动控制闭环控制系统中使用最为普遍的一种。但是存在响应速度慢、难以选取合适参数的问题,用传统的Ziegler-Nichols(ZN)法所得的参数不能满足该系统负载随温度等外部条件不断变化的状况[10]。因此为了提高频率响应的速度,减少失谐带来的能耗甚至避免故障,本文将改进的粒子群优化算法引入PID 的参数设计。粒子群算法来源于鸟类觅食、寻径的生物本能,鸟类在觅食过程中通过与同伴交流获得食物的位置,进而及时改变自己飞行的方向和速度,以便更快而准地靠近食物的位置。觅食的鸟类个体对应算法中的粒子,鸟群对应粒子群[11]。基于改进粒子群算法的PID控制结构如图3 所示。
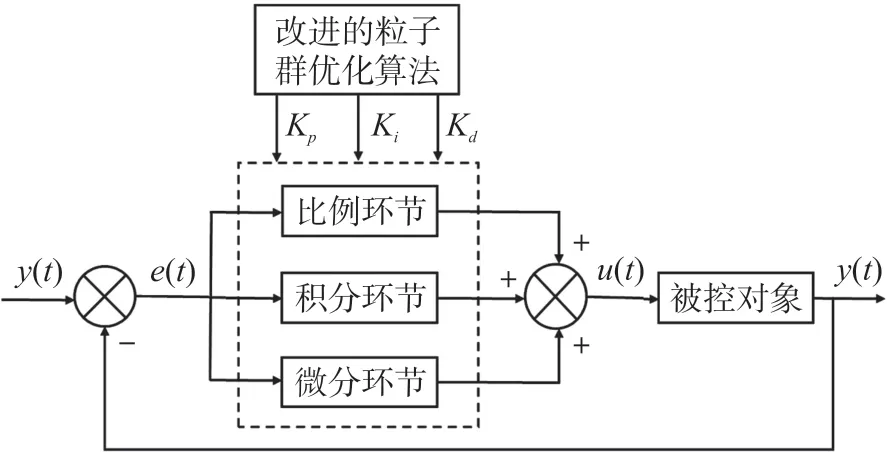
图3 基于改进粒子群算法的PID 控制结构
PSO 算法具有迭代过程简单,算法易写,收敛速度快的优点。其迭代关系见式(1)、式(2)。其中为当前离子速度,为上一代粒子速度,pBEST为上一代粒子最优值,gBEST上一代群体最优值。为当代个体位置,为上一代个体位置。w为惯性权重,c1、c2表示学习因子,r1、r2表示随机变量,分布在[0,1]之间。

由于标准PSO 算法的惯性权重w(k)是固定不变值,如果取值过大或过小会发生局部搜索能力弱或者全局搜索范围窄的情况。线性惯性权重递减策略(LDIW)将w(k)改为线性变化,提高了搜索精度[12],在此基础上,本文将惯性权重w(k)的变化趋势进行改进,如式(3)、式(4)所示,较LDIWPSO 权重变化速度变慢,但是在两头较快中间最慢,在全局搜索的迭代次数增加,并且逼近局部最优解处的能力增强。

式中:k表示当前迭代的次数,kmax表示在算法中最大的迭代次数。wmax表示惯性权重最大取值,wmin表示惯性权重最小取值。
采用改进LDIWPSO 算法的流程如图4 所示。算法运行分为如下几个步骤:

图4 改进LDIW-PSO 算法的流程
(1)设置初始化参数,给定惯性权重初始值及变化函数,规定粒子搜索的速度和位置范围以及加速度因子c1和c2;
(2)将粒子对应到PID 控制系统中的参数,并计算适应度;
(3)根据惯性权重变化函数更新权重,进一步更新粒子的速度和位置,得到新的粒子群;
(4)计算新的粒子群的个体最优位置和全局最优位置与上一个对应值进行比较,保留较小的一组。
(5)判断是否满足结束条件,若满足,输出得到的最优解,并结束。若不满足,更新粒子群,计算新粒子群的最优位置。
3 电源的参数设计
本文设计的超声波电源的功率为600 W。根据功率计算,调功电路选择双向晶闸管VT1 的型号为BTA20,整流桥D1选择KBPC1506,滤波电容C1计算值为290 μF,选用的参数为470 μF/450 V,逆变级开关管选择型号为N 沟道MOS 管IRFP460。阻抗匹配变压器T1初级与次级绕组匝数之比1 ∶1,选用EE50 磁芯,每级线圈匝数均为23。谐振电感采用EI50 磁芯,感值计算值为0.72 μH,实测值为0.79 μH。
4 样机调试结果
根据以上设计的硬件参数和频率控制采用的算法做出样机,如图5 所示。将电源接入频率为20 kHz 压电换能器,压电换能器可以稳定工作,并成功应用于生物蛋白处理过程,蛋白结构经仪器测定较对照组发生了明显变化。

图5 超声电源样机
对样机的逆变级驱动波形和输出电压、电流波形进行测试。测得采用单一经典PID 算法的超声电源的功率管驱动波形、输出电压和输出电流波形如图6(a)、6(b)所示。采用改进的PSO-PID 算法测得的波形如图7(a)、7(b)所示。对比发现,两种算法下的开关管驱动波形中均有明显频率跟踪过程,前者跟踪时间相对较长,可以测得约为140 ms,输出电压和电流相位存在明显差异。而后者跟踪过程明显缩短,可达到80 ms,输出电压和电流相位接近一致,比前者频率跟踪效果有明显优势。
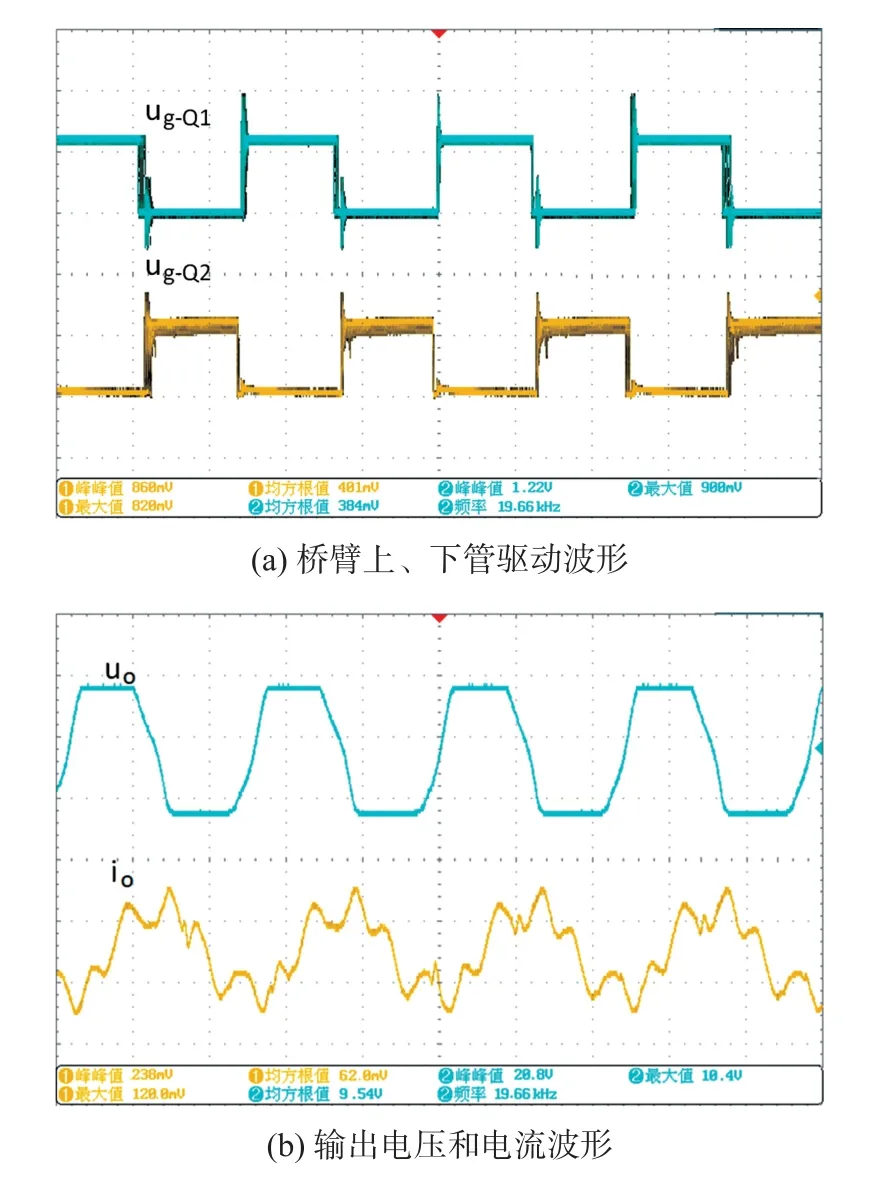
图6 采用PID 控制时的波形
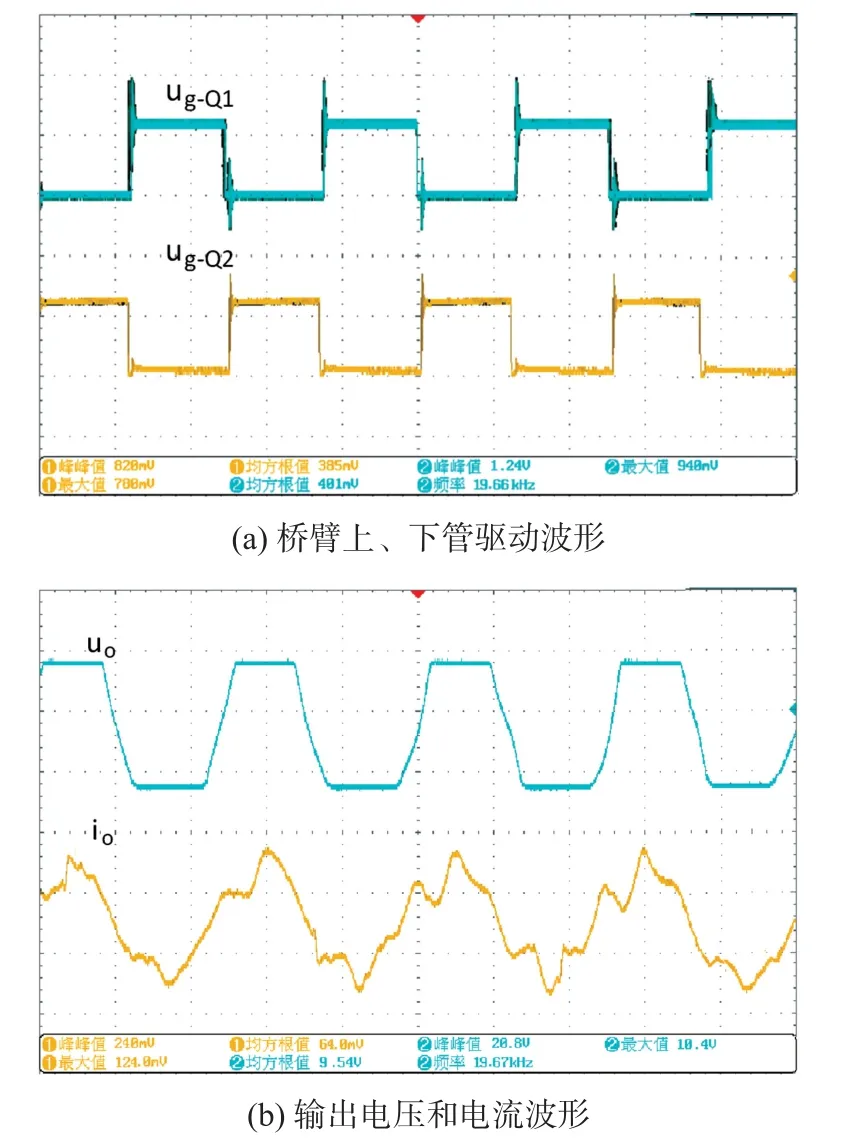
图7 采用改进PSO-PID 控制时的波形
5 结论
本文设计了一种功率连续可调,可实现频率快速跟踪的超声波电源。功率调节采用可控硅连续调功技术,频率控制采用PID 控制结合改进的LDIWPSO算法原理。对设计的超声波电源进行测试,结果表明功率调节连续平滑,频率跟踪性能好,响应速度快。与采用经典PID 频率控制的样机进行对比,输出电压和电流相位的一致性有明显改善,是一种较好的频率控制方式。
