改进的多霍尔传感器BLDCM转矩脉动抑制方法
2021-07-15张继华王晓东
张继华, 王晓东
(辽宁工程技术大学 电气与控制工程学院,辽宁 葫芦岛 125105)
0 引 言
无刷直流电机(brushless DC motor,BLDCM)具有结构简单、易于维护、运行稳定等优点,在各种伺服系统和驱动装置中得到了广泛的应用。但是,由于其系统的特殊性使它存在转矩脉动大的问题,因此BLDCM转矩脉动的抑制成为了研究的热点和难点[1,2]。霍尔传感器作为BLDCM系统的重要组成部分,用于确定电机转子的位置,从而确定电枢电流的换相时刻。它常被整合到BLDCM的本体中,常见的三相BLDCM就内嵌了3只霍尔传感器。文献[3]中提出了一种基于6只霍尔传感器的BLDCM转矩脉动抑制方法,但该方法只能对高速运行的电机起作用。
本文提出了一种拟脉宽调制(pulse width modulation,PWM)_ON_PWM调制方式(后文称拟POP调制),并通过仿真验证了其可行性,仿真结果表明,此方法能够在全速段对BLDCM的转矩脉动起到较好的抑制作用。
1 BLDCM的转矩脉动分析
BLDCM的转矩脉动主要有三种:由非理想空载反电动势波形所引起的谐波转矩脉动、由电机齿槽定位效应所引起的转矩脉动、由电枢绕组电流换相所引起的转矩脉动[4]。对于一台设计制造精良的BLDCM来说,齿槽转矩脉动和谐波转矩脉动很小[1],所以本文不做研究。
为了分析BLDCM的转矩脉动,首先建立了BLDCM的数学模型。在忽略永磁体阻尼作用,转子没有阻尼绕组;忽略磁路饱和,不计涡流和磁滞损耗;忽略定子相电流的电枢反应,气隙磁场分布近似为矩形波;三相绕组完全对称的分布于定子光滑内表面的条件下[5],可以得到BLDCM三相绕组的电压平衡方程式
(1)
式中Ua,Ub,Uc为各相绕组的端电压;ia,ib,ic为各相电流;ea,eb,ec为各相的反电动势;R为绕组相电阻;Un为电机中性点的电压;Ls=L-M,L为每相绕组的自感,M为绕组间的互感;P为微分算子[5]。由式(1)可得BLDCM的等效电路图,如图1所示。
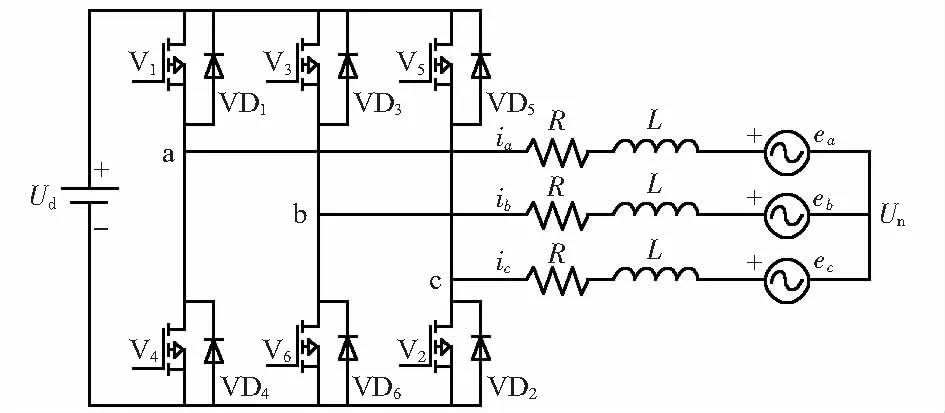
图1 BLDCM等效电路
BLDCM任意时刻至少有两相绕组导通,其转矩为
Tes=2(eaia+ebib+ecic)/Ω
=2EsId/Ω=(pN/π)ΦmId
(2)
式中Id为直流母线侧电流,由式(1)和式(2)可知,在BLDCM机械结构固定不变的前提下,其电磁转矩与相电流正相关,所以,相电流脉动是引起电机转矩脉动的主要原因。
BLDCM的相电流脉动主要有两种,1)电流换相期间所产生的脉动;2)电流非换相期间所产生的脉动。BLDCM的绕组可视为感性负载,因此三相绕组中的电流不能突变。在换相期间,关断相和开通相的电流各自按照一定的速率下降和上升,如果下降速率和上升速率不相等,就会在非换相相产生脉动电流,从而使电机产生转矩脉动。文献[6]中指出,只有在Ud=4E时关断相和开通相的电流变化速率相等,以BC相导通切换至AB相导通为例,如图2(a)所示,其中,Ud为BLDCM的直流母线侧电压,E为一定转速下的定子每相空载电动势的幅值;当Ud>4E时,电机处于低速状态,关断相电流变化速率小于开通相电流变化速率,如图2(b)所示;当Ud<4E时,电机处于高速状态,关断相电流变化速率大于开通相电流变化速率,如图2(c)所示。
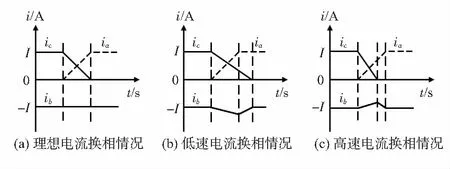
图2 不同转速下电流换相情况
在非换相期间,一般认为非导通相没有电流通过,但是,由于选用的PWM调制方式不同,电机中性点电位也不同,则非导通相端电压也不同[7]。当端电压满足逆变电路非导通相二极管的导通条件时,二极管续流,使非导通相产生脉动电流,从而使BLDCM的合成转矩产生脉动。
2 多霍尔传感器转矩脉动抑制原理
为了抑制换相电流脉动引起的电机转矩脉动,在与BLDCM原有的3只霍尔传感器相隔30°的位置各自增加1只霍尔传感器,如图3(a)所示。
6路霍尔传感器的输出信号每隔30°电角度发生一次变化,每变化一次对应一种逆变电路开关管状态,在一个周期内,开关管状态变化12次,此时BLDCM处于三相十二状态工作方式。由霍尔传感器的工作原理可知,其输出是占空比为1∶1的1和0逻辑信号,如图3(b)所示。
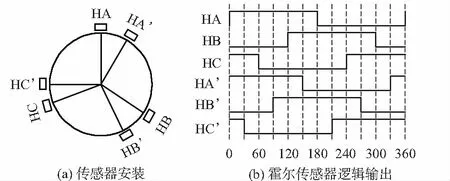
图3 多霍尔传感器安装位置示意及逻辑输出
假设BLDCM处于三相十二状态工作方式时,逆变电路中开关管的开通状态按时间顺序为:V5V6V1,V1V6,V1V2V6,V1V2,V1V2V3,V2V3,V2V3V4,V3V4,V3V4V5,V4V5,V4V5V6,V5V6。当开通状态从第12个换为第1个时,即由V5V6开通切换为V5V6V1开通,A相开始开通,此时电机三相绕组均有电流通过。因为电机绕组的阻值很小,所以在分析时可忽略不计。由BLDCM等效电路图(图1)可得三相电压的暂态方程组
(3)
且各相电流的初始值为:ia=0,ib=-I,ic=I,则各相电流的表达式为
(4)
转子转过30°电角度后,开通状态由第1个换为第2个,即由V5V6V1开通切换为V1V6开通,C相开始关断,此时电机只有两相绕组有电流通过。同理可得三相电压暂态方程组
(5)
则各相电流的表达式为
(6)
由式(4)和式(6)可知,当Ud<4E时,即电机处于高速状态时,在持续60°电角度的相邻两次换相期间,非换相相B的电流表达式的斜率前30°电角度为负值,后30°电角度为正值;开通相A的电流表达式的斜率前30°电角度较小,后30°电角度较大,如图4所示。
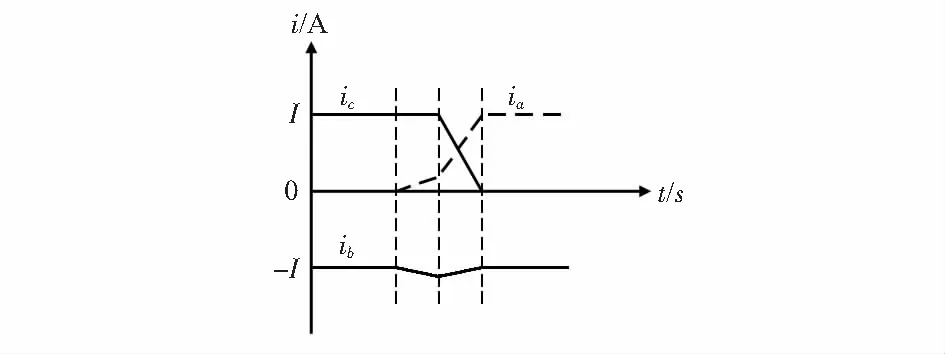
图4 多霍尔模式换相电流波形
通过与图2(c)对比可以看出,多霍尔传感器工作方式能够有效抑制BLDCM的转矩脉动。但是,当Ud>4E时,即电机处于低速状态时此工作方式将失效,为了在全转速范围内抑制BLDCM的转矩脉动,在多霍尔传感器工作方式的基础上,本文提出了拟POP调制方式,弥补了此工作方式的不足。
3 拟POP调制转矩脉动抑制原理
基于三霍尔传感器的BLDCM处于三相六状态工作方式时,其逆变电路中的开关管每周期内开通120°电角度,且任意时刻只有两相绕组导通,另一相绕组断开,无电流通过。若非导通相的端电压满足续流二极管的导通条件,则非导通相产生脉动电流,电机产生转矩脉动。这种转矩脉动可以由PWM调制斩波抑制,文献[8]中对常用的几种PWM调制方式,即:H_PWM-L_ON,H_ON-L_PWM,PWM_ON,ON_PWM四种调制方式进行对比分析并通过实验证明:采用PWM_ON调制方式时电机的转矩脉动最小。文献[7]在PWM_ON调制方式的基础上提出了一种全新的POP调制方式,即在开关管开通的120°电角度内,前30°进行PWM调制,中间60°恒通,后30°进行PWM调制。它能够消除非换相期间非导通相的二极管续流现象,实验结果也表明,它在电机处于低速状态时对转矩脉动抑制效果明显。
当基于多霍尔传感器的BLDCM处于三相十二状态工作方式时,由逆变电路的12种开通状态可以知,电路中每只开关管每周期内开通150°电角度。本文基于此种工作方式提出了一种新的拟POP调制方式,即在开关管开通的150°电角度内,前45°进行PWM调制,中间60°恒通,后45°进行PWM调制,如图5所示。
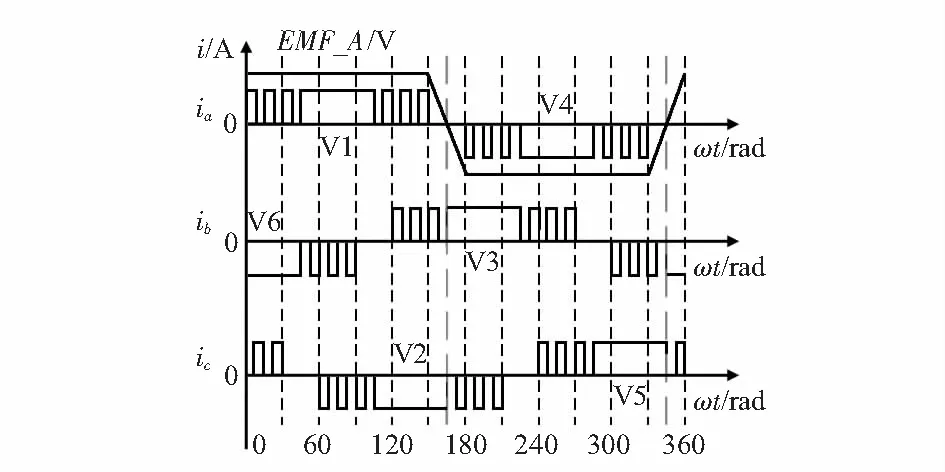
图5 拟POP调制方式下的三相电流与A相反电动势示意
当非导通相的端电压大于直流母线侧电压或低于直流母线侧地电平时,非导通相的二极管会发生续流现象,此现象将引起BLDCM非换相期间转矩脉动。若想消除此现象,则需对非导通相的端电压进行限制。因此,非导通相的端电压需满足以下条件(以A相是非导通相为例)
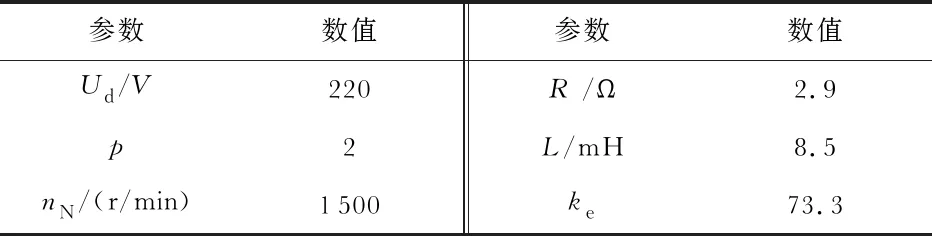
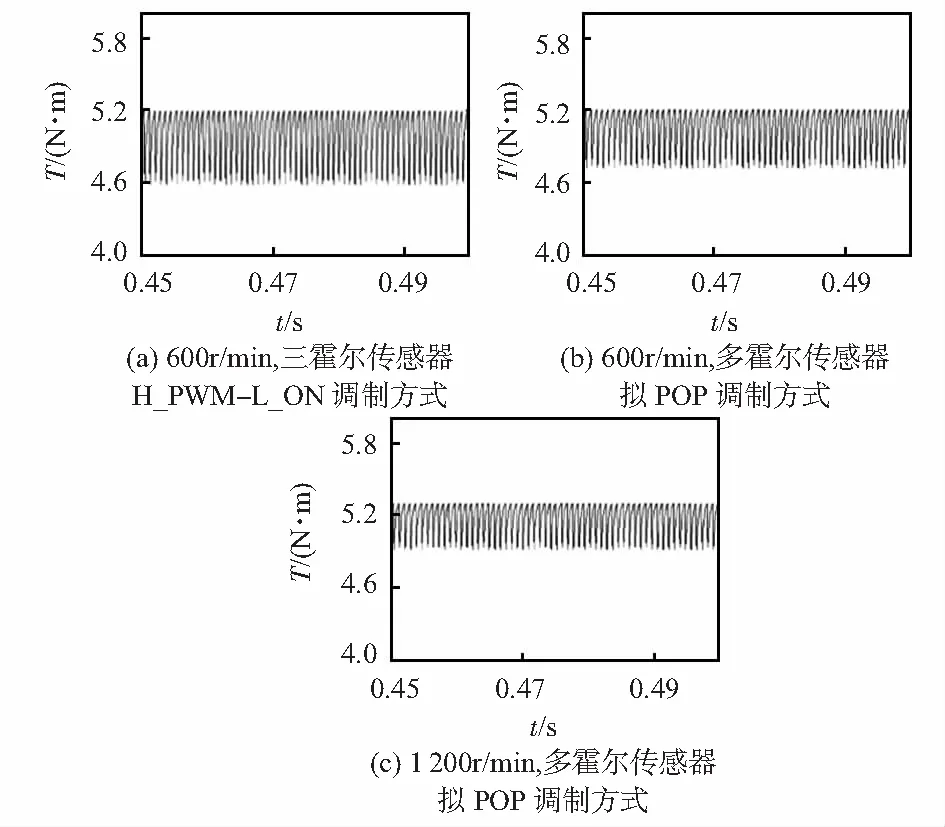
0<(Ua=Un+ea) (7) 由BLDCM的数学模型和等效电路图可知,Un的取值范围是{0,Ud/2,Ud},且ea,b,c 如图5所示,A相为非导通相时,相反电动势是梯形波,共有4个电角度区间会发生非换相期间非导通相续流现象,分别为:150°~165°,165°~180°,330°~345°,345°~360°。对照图6做以下讨论:在150°~165°区间和345°~360°区间时,ea>0,由式(8)和式(9)可知,满足式(7)的条件为:Un=0或者Un=Ud/2,其中Un=0表示逆变电路下桥臂续流,则符合条件的PWM调制方式为上桥臂V3,V5进行PWM调制,下桥臂V2,V6恒通。在165°~180°区间和330°~345°区间时,ea<0,满足式(7)的条件为:Un=Ud或者Un=Ud/2,其中Un=Ud表示逆变电路的上桥臂续流,则符合条件的PWM调制方式为上桥臂V3,V5恒通,下桥臂V2,V6进行PWM调制。 根据图5和上述讨论可以看出拟POP调制方式与POP调制方式一样能够解决BLDCM非换相期间非导通相的续流问题,所以,它能很好适用于基于多霍尔传感器的BLDCM的转矩脉动抑制。但是,此方式与其他PWM调制方式一样,对处于低速状态的BLDCM的转矩脉动抑制效果都要优于处于高速状态时。 在MATLAB/SIMULINK中搭建BLDCM转速闭环控制系统。所选BLDCM的各项参数如表1所示。 表1 BLDCM的仿真参数 通过此系统进行对比实验,当基于三霍尔传感器的BLDCM处于三相六状态工作方式时,选择常用的H_PWM-L_ON调制方式,给定负载TL=5N·m,给定转速为600 r/min,得到输出转矩波形,如图6(a)所示。从波形可以看出,BLDCM的输出转矩脉动约为0.6 N·m。当基于多霍尔传感器的BLDCM处于三相十二状态工作方式时,选择拟POP调制方式,给定负载TL=5 N·m,给定转速为600 r/min,从图6(b)波形可以看出,BLDCM的输出转矩脉动约为0.45 N·m。将给定转速提高到1 200 r/min并保持其他条件不变,由图6(c)波形可以看出,BLDCM的输出转矩脉动约0.4 N·m。 图6 BLDCM输出转矩波形 通过图6中对比表明:与常用的基于三霍尔传感器的H_PWM-L_ON调制方式相比,这种基于多霍尔传感器的拟POP调制方式可以使BLDCM的转矩脉动在低速段降低25 %,高速段降低33 %。 本文研究了抑制BLDCM转矩脉动的方法,经过分析在BLDCM的数学模型和等效电路的基础上,提出了一种基于多霍尔传感器的改进型PWM调制方式。对其原理进行数学论证和讨论分析,通过仿真验证了此方式的可行性,即可以在BLDCM全转速范围内有效抑制其输出转矩脉动。4 仿真结果与分析
5 结 论
