基于Simcenter 3D二次开发技术的机构仿真系统开发
2021-07-15韩非吕海飞陈志仁杨斌王鹏飞李凯
韩非,吕海飞,陈志仁,杨斌,王鹏飞,李凯
(上海无线电设备研究所,上海 201109)
0 引言
随着近年来机械自动化行业的迅猛发展,基于设计-仿真-设计的设计理念已成为目前主流的机械设计方法,基于高精度与高性能的设计理念,对机构的动力学仿真提出了更为严苛的要求,但对于构件多、空间小的复杂机构,一方面在零件较多的情况下,难以兼顾仿真结果由整化零对零件进行优化设计;另一方面机构运动复杂,在运动条件的约束下难以建模及对其进行集中调整与参数提取[1],近年随着软件二次开发的广泛应用,针对复杂系统的定制化二次开发成为了处理以上问题的新方法[2]。
1 Simcenter 3 D二次开发工具
Simcenter 3D继承了NX的开发接口,包含了4种开发工具:GRIP、UG/Open、KF、NX Open[3]。其中,NX Open C++是西门子公司主推的基于C++语言的二次开发方式,功能强大,几乎可以实现NX的全部功能。GRIP等开发工具NX不再更新它的函数,同时具有代码量大、无法与UI完美结合等缺点,由于上述原因,本文采用NX Open C++进行开发[4]。
二次开发包含了多种其他开发文件,其中MenuScript脚本语言可以根据用户需求创建和编辑菜单和工具条,Block UI Style是一个可视化用户界面生成器,设计NX交互风格对话框[5],UF_MOTION_XXX等为用户提供了运动仿真模块相关参数,在二次开发界面,设计人员可通过运动仿真结果对摩擦等参数进行修改,以达到对机构仿真输出结果参数的修正[6]。
2 技术路线
机构动力学仿真系统工作思路为根据Simcenter 3D动力学仿真方法,对机构模型导入、构建运动体、定义约束等功能进行集成,同时设立调参模块,对刚度、摩擦因数等参数进行调整及对仿真结果进行一键导出,不断在取值范围内修改相关参数直至仿真结果等满足设计要求,完成机构的设计仿真工作,技术路线如图1所示。
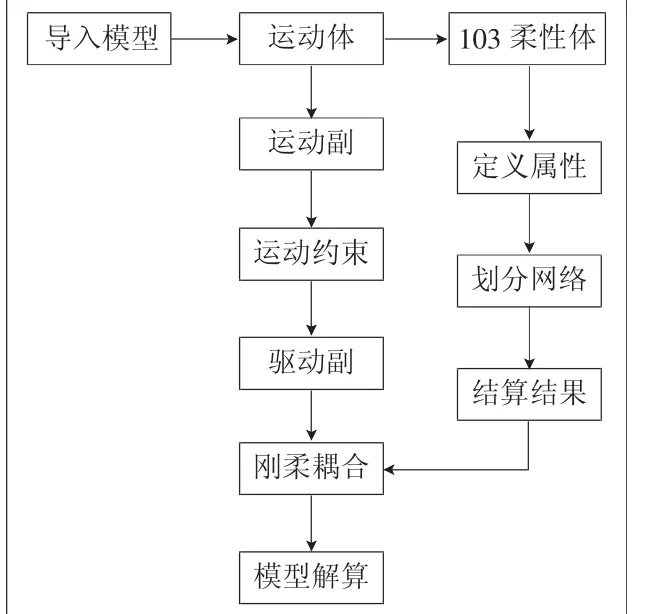
图1 技术路线
在Simcenter 3D初始界面中将三维模型部件定义为运动体对象,并添加质量、转动惯量、质心等物理属性。同时在运动体上定义一系列约束,包括运动副、3D接触、弹簧、力、摩擦阻尼等约束特征,并创建结算方案,定义重力、主数组等参数。构建完毕后,转入前后处理模块,选择103柔性体定义模块进入有限元分析,定义材料属性、划分网格、添加1D连接与约束、创建柔性体,并将*.op2仿真结果文件导入舱门运动模型中,重新解算,完成刚柔耦合。解算完成后,可在运动展示模块查看动力学仿真结果,例如三维动画、二次图标,同时可在参数设置模块批量修改运动参数,简化操作。
通过UI设计,将二次开发系统设为模型求解、运动分析、参数设置、动画设置、参数导出5个模块,系统设置如图2所示。
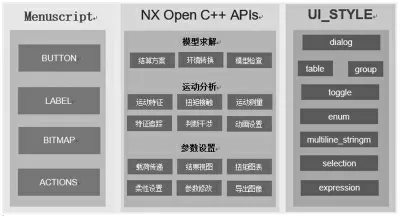
图2 系统设置
3 界面开发
3.1 MenuScript与UI定制
建立环境变量UGII_USER_DIR,建立项目文件夹中已经创建startup和application文件夹,其中startup保存的是菜单栏空间按钮文件、MenusCript菜单脚本文件及UI文件;application储存的是动态链接库文件[7],通过NX1897及VS2017编辑环境,编辑NX Open C++Wizard项目,与定义在自制菜单上的UI接口相结合,实现可编辑功能[8]。
一个完整的NX二次开发应用程序开发步骤包括:1)编辑源文件;2)编辑源文件为目标文件;3)链接对象为可执行文件;4)与界面UI等相结合测试;5)如果运行成功则输出运行结果,总体框架如图3所示[9]。

图3 总体框架
3.2 柔性体及调参界面功能定制
机构模型中存在多种柔性体,多种柔性体同时结算时,不易观察单一构件的应力集中现象,可在柔性体设置模块对柔性体进行激活,同时由于Simcenter 3D软件对定义摩擦,接触与路面的构件无法定义柔性体,在激活柔性体的同时关闭构件上定义的摩擦,在关闭柔性体时激活摩擦。
在参数设置模块中可以对摩擦、弹簧刚度、预紧长度、接触刚度等运动参数进行批量修改,用户在UI界面中写入想要修改的参数,每一个输入框对应BLOCKID数字接口,用户填写后,对其中的参数进行提取,调用模块相关dll动态链接库中接收数据,应用在相关的运动体上,调整参数,流程如图4所示。机构二次开发动力学仿真系统针对复杂而重复的调参操作进行脚本化替代,在确定机构相关约束后可以快速地进行调参,不用单独设置,简化机构动力学参数设置过程,有效节约仿真测试人员的测试时间与测试成本。

图4 柔性体设置
4 应用范例
飞机舱门是机身中较为复杂的部位之一,包含上千零部件,同时作为进出机舱的可开关重要组件,对其功能具有严格的要求,舱门中多数部件作为机构的一部分参与运动,同时传递舱门打开及锁闭过程中手柄与门轴产生的启动及旋转力矩,机身舱门的动力学仿真在实际操作过程中较为繁琐,结合前一次实验结果改进参数后,需要重复上一次的动力学仿真操作,对于多次进行仿真测试实验效率低下,不利于设计进度的推进,应用Simcenter 3D二次开发技术,针对一些复杂而重复的操作进行脚本化替代,能够有效节约仿真测试人员的测试时间与测试成本,通过二次开发,可以快速修改参数,舱门三维模型及参数设置界面如图5所示。在确定模型约束后能进行快速仿真,二次开发的方法都能做到一键修改参数并进行重复且复杂的仿真计算的操作,避免了多次进行重复操作,以提升效率。

图5 舱门模型及调参界面
根据设计要求,舱门在提升时手柄力不应超过196 N,一般峰值为147 N左右,否则将对机务人员产生较大的负担,同时要求手柄力变化平稳,保证舱门开启的流畅性,同时舱门在打开过程中应始终与机身平行,系统在调参后求解所得手柄转矩与舱门位移曲线如图6所示。

图6 手柄转矩曲线与舱门位移曲线
通过对运动参数的调整,手柄力峰值趋于147 N,同时舱门在运动过程中始终与机身保持平行状态。导出刚柔耦合模型手柄柔性体应力位移云图如图7所示。

图7 舱门手柄位移及应力云图
仿真系统在柔性体模块定义了包括手柄、主铰链臂、平衡杆、门轴、滑轨等柔性杆件,实现了舱门模型的刚柔耦合,同时可以对多个柔性体进行激活操作,观察单一构建的应力集中现象。
5 结语
基于Simcenter 3D的舱门动力学仿真系统实现了对舱门模型导入至数据导出全套的开发流程,可以根据舱门实体数据要求改变相关运动参数,达到精确的控制效果,通过二次开发可以实现包括运动定义、参数导出、动画设置等多项功能,具有很高的实用价值。
