Stand parameter extraction based on video point cloud data
2021-07-15ZiyuZhaoZhongkeFengJinchengLiuYudongLi
Ziyu Zhao·Zhongke Feng·Jincheng Liu·Yudong Li
Abstract Monitoring sample plots is important for the sustainable management of forest ecosystems.Acquiring resource data in the field is labor-intensive,time-consuming and expensive.With the rapid development of hardware technology and photogrammetry,forest researchers have turned two-dimensional images into three-dimensional point clouds to obtain resource information.This paper presents a method of sample plot analysis using two charge-coupled device (CCD) cameras based on video photography.A handheld CCD camera was used to shoot the sample plot by surrounding a central tree.Video-based point clouds were used to detect and model individual tree trunks in the sample plots and the DBH of each was estimated.The experimental results were compared with field measurement data.The results show that the relative root mean squared error (rRMSE) of the DBH estimates of individual trees was 2.1–5.7%,acceptable for practical applications in traditional forest inventories.The rRMSE of height estimates was 2.7–36.3%.Average DBH and heights,and tree density and volume were calculated.Video-based methods require compact observation instruments,involve low costs during field investigations,acquire data with high efficiency,and point cloud data can be processed automatically.Furthermore,this method can directly extract information on the relative position of trees,which is important to show distribution visually and provides a basis for researchers to regulate stand density.Additionally,video photography with its unique advantages is a technology warranting future attention for forest inventories and ecological construction.
Keyword Video photography·Point cloud·Forest·Hough transform·DBH
Introduction
Forest ecosystems are an important component of terrestrial ecosystems,playing an important role in maintaining ecosystem balance and the biosphere as a whole (Trumbore et al.2015).Because of the complex structure of forests,and often large expanse,it is sometimes not possible to conduct a full survey of an entire forest during field investigations;a forest plot can instead be established (Corona and Marchetti 2007;Corona 2010).The method of using local measurements in fixed sample plots has been adopted to calculate stand structure and development changes (Zeng et al.2017).The distribution of trees in sample plots is an important index for studying ecological structure and managing forest areas (Reutebuch et al.2005).In a sample plot survey,how to quickly,conveniently and accurately determine tree coordinates is an important component of forest inventories(Feng et al.2001;Kangmei et al.2009).
Traditionally,forest inventories in China have been conducted by measuring each tree,estimating forest debris and recording the amount of damage that may be present.The efficiency of measuring,reading and recording with a wheel ruler or girth ruler and altimeter is poor and time-consuming.Because of their simplicity and low accuracy,models that are based on these data or other similar analyses are limited (Chen et al.2015).
With the growth in space technology,combining satellite images with sampling surveys is a new technique for conducting forest inventories that saves labor and material resources.This method has improved accuracy and is suitable for large-scale biomass and stand volume surveys,but it has limitations for precise measurements at a small scale(Næsset 2002;Leeuwen and Nieuwenhuis 2010;Kaartinen et al.2012;Maltamo et al.2016).
Several studies have attempted to use terrestrial images to automatically measure trees.Juujarvi et al.(1998) developed an imaging system consisting of a calibration camera,a laser rangefinder and a calibration rod.Stem curvatures of Scots pine (Pinus sylvestrisL.) can be estimated by image interpretation using a tapering model.Lin and Hyyppa (2016) developed a laser camera that integrated an optical camera with a laser beam generator to measure DBH,with the device,constructed of a Canon EOS 400D digital reflex camera with an integrated Mitsubishi ML101J27 laser line generato;the effective observation value was 57.4% using the automatic diameter measurement method and the standard deviation of the observation error was 1.27 cm.Dick et al.(2010) used 360-degree panoramas to generate stem maps.The measured DBH and images were used to derive the actual diameters and the location of trees in the plot;Most of the observed trees were within 0.5 m of the actual trees.Compared with measuring individual trees with traditional tools,automation is an improvement.However,considerable manual labor is still needed;this indicates the difficulty of automating individual tree measurements.
Point cloud data,first obtained by terrestrial laser scanning (TLS),provides detailed descriptions of the threedimensional (3D) features of the real world.The application of TLS makes single tree mapping,combining location and height estimations in forest stands,relatively more automatic and accurate.Research has shown that 3D point cloud data and automatic processing algorithms can provide high precision and widely used parameters such as tree location,height,DBH and canopy density (Huang et al.2011;Aguilar et al.2019;Ojoatre et al.2019;Wu et al.2019;Zhou et al.2019;Lu et al.2020).Furthermore,in addition to regular tree parameters measured in forest inventories,more detailed attributes such as stem or taper curvatures,which reveal wood productivity and quality,can be derived from TLS with high degrees of accuracy (Liang et al.2014a).Studies have explored the use of TLS at the plot level for assessing stem volume and biomass components (Gollob et al.2019),for individual tree reconstruction,including branches,twigs,and leaves (Hauglin et al.2013;Wagner et al.2018;Aguilar et al.2019;Chen et al.2019),and to improve the physiological understanding of tree growth (Wagner et al.2018).Despite the high accuracy of TLS,the data for whole plots are considerable,which increases labor and computer hardware costs of data processing.A further disadvantage of terrestrial laser scanning is that it is relatively expensive and requires the training of personnel and specialized equipment.
In spite of these studies on TLS systems,point cloud data generated from images have become another source of point cloud data (Pollefeys et al.2004;Haala et al.2013),most recent research on photogrammetrically derived forest parameters has used a hand-held camera.Based on photogrammetry,global navigation satellite system (GNSS),and spatial positioning technology,Liu et al.(2018) developed a real-time dynamic binocular stereo photogrammeter with multiple functions and high precision for positioning single tree images in combination with point cloud measurements in real-time.The forest position was determined in real-time.However GPS signals in forests are vulnerable to interference from tree canopies and as a result,the positioning errors were large.Qiu et al.(2018) used an unmanned aerial vehicle (UAV) to construct tree 3D point clouds.This method measures height and crown width,and predicts DBH and age.It is inexpensive and efficiency and accuracy are high but is only suitable for large-scale sample plot estimations.A multi-camera system by Forsman et al.(2013) had five calibrated consumer cameras installed on the equipment and used in field tests to compare with the ground truth measurements.Preliminary results showed that estimated diameters were less than 10% of the ground truth-values.The applicability of this method is limited due to the complexity of the equipment and narrow measuring range.Liang et al.(2014b) used an uncalibrated handheld consumer camera to generate a sample plot cloud,and measured the usefulness of the plot at the level of individual trees.The mapping accuracy was 88% and the root mean squared error of the DBH estimates of individual trees was 2.4 cm.Piermattei et al.(2019) used a consumer-grade camera for deriving tree positions,DBHs and stem curves.Other research has shown impressive photogrammetric reconstructions of individual trees under artificial conditions (Huang et al.2018) and in natural forests (Mulverhill et al.2019;Roberts et al.2019).However,due to the time-consuming nature of photography,to obtain a continuous image requires numerous photos.All of these methods build 3D point clouds by photos,leading to low efficiency to take photos under field conditions.
Recently video photogrammetry has become attractive because advancements in dense image matching and point cloud reconstruction algorithms have lowered the level of expertise required for deriving dense,accurate 3D point clouds.The successful extraction of point cloud data from video images to plot individual trees in forest maps was another benefit.Hand-held consumer cameras are interesting because they are inexpensive,portable sensors,and easy to access.The efficiency of image-based camera point clouds is lower than that of video point clouds.It is important to determine whether video photography can produce a point cloud applicable to individual tree mapping in a sample plot.This study addresses two problems:(1) how to use handheld consumer cameras to obtain video images and generate forest map point clouds;and,(2) how pinpoints might be obtained from single-tree mapping via video based point clouds.This research evaluates the feasibility of generating point clouds at the individual tree level with a handheld consumer camera.
Materials and methods
There are three key steps:data acquisition,processing and analysis.To establish the observation scheme,a video instrument was used to obtain video photography.A 3D point cloud was then generated based on the video data and the relative positions of trees,and DBH and higher stand parameters were extracted by the design algorithm.Finally,based on field-measured data,the extracted tree parameters were compared and analyzed.Measurement accuracy and feasibility of the scheme were verified.
Study area
The research was carried out in the Xishan Forest Park in the mountainous areas west of Beijing City (39°58′12″N,116°12′10″E) 25 km from the city centre (Fig.1);the area is 2554.7 hectares and the altitude 423 m a.s.l.The area is a warm temperate,semi-humid to semi-arid continental monsoon climate with four distinct seasons.In winter,there is less precipitation and normally in the form of snow.This is a plantation ofCupressus funebrisEndl.,Cotinus coggygriaScop.,Pinus tabuliformisCarr.,Quercus variabilisBlume,andFraxinus chinensisRoxb.There are few shrubs and herbs in the plantation.

Fig.1 Location of the study
Field survey
Standard data were collected 1 June 2019.Slopes in different forest categories were selected,such as coniferous and broadleaved forests.Three 20 m × 20 m plots within the park were established (Yang et al.2013).A DBH caliper and an NTS-391 total station (Southsurvey,Guangzhou,China)were used to measure DBH and tree height.Height was measured in the hanging high measurement mode based on the final tree height standard.The position was measured by the installation at the station setting as the position of a tree and the height based on a standard value.When measuring these values,the position of each tree was close to the base;heights were measured in the suspension mode of the total station,and the species recorded.The actual or true DBH of the corresponding tree was used as the standard value.The overall parameters of the plantation are shown in Table 1.

Table 1 Feature parameters of the sample plots
Video photography
Data were acquired in January 2019.A terrestrial photogrammetry instrument of two CCD lenses (Kodak_PixPro SL25,Eastman Kodak Company,city,state.) was utilized.The vertical baseline of the two CCD lenses was fixed and the length of the baseline was 25 cm.The camera was 71 mm in width,58.6 mm in height and 65.2 mm in depth.The total weight (the body,battery and lens) was 1.1 kg (Fig.2).

Fig.2 Hand-held camera
The point cloud method with a video camera was used to surround the plot.A stand sample 3D-point cloud was built to perform 3D visualization,and the sample area was extracted based on the plot tree DBH and stand height.Average stand factors,including DBH,height,number,density and volume were calculated.The details of the process are:
1.After selecting the sample plot,a 2-m rod was placed next to the central tree to correct the true proportions of the 3D point cloud that was established;
2.A terrestrial photogrammetry instrument was used,starting north of the sample field and circling the central tree clockwise.Video images were stored in the instrument;the walking speed of the handheld instrument was approximately 1 m/s.
3.As shown in Fig.3,the method of circling the central tree was adopted for photography.In the photography circle,the main optical axis of the upper lens and the horizontal surface of the horizontal lens were at 30°forward,while the main optical axis of the super lens maintained a horizontal forward direction (Fig.4) and the path was generally 2‒4 m away from the boundary of the sample area.

Fig.3 Stand plot and the photographing path (dash line);the square the plot boundary,circles and their diameters are tree locations and corresponding DBHs

Fig.4 Photographic sketch of the handheld camera;the lower lens angle is 0°,the upper lens angle is 30°
Point cloud generation and extraction tree position
After obtaining the video images of three forest sample plots,the images were divided into upper and lower images.The commercial software Pix4Dmapper (Swiss Federal Institute of Technology,Lausanne,Switzerland) pre-processed the images and computed the absolute scale.To ensure the effect of video point cloud restoration,length of video recorded in the three sample plots was 2.5‒2.9 min.The frequency of extracting frames was set to 25 frames/sec.The number of frames extracted from the three sample videos were 282,231 and 261 respectively.If the number of video frames were too small,the point cloud would be too sparse and would not reflect the 3D real situation of the stand.In contrast,if the number of frames were too large,it would cause data redundancy and increase the processing time.Before initializing the pre-processing video,the quality parameters for feature point matching were set to high and automatic lens calibration selected.The process of creating an image point cloud using Pix4Dmapper is based on principles of photogrammetry and computer vision analysis.One of the most commonly used and most rigorous methods is the bundle adjustment algorithms based on the structure from motion techniques.This method can extract the feature points with the same characteristics in different images,and iteratively calculate the feature points through the constraint adjustment method.Through multiple iterations,more images are merged into a complete picture.After deep construction and point cloud encryption,the sparse point clouds of the three plots were processed into encrypted point cloud models.A correction ratio was then created according to the length of the flower bar placed in the plot.After the video images were processed and the point cloud generated,a 3D point cloud model of the sample plot was built.To compute the absolute scale,the dimensions of at least one scene of the camera movement must be known,so the point cloud model was preliminarily processed at the same time using a fixed-length sight rod to correct the proportion model.The number of original video frames,length of video time,number of selected frames,software processing time and average density are shown in Table 2.

Table 2 Detailed parameters of video image processing
After preliminary treatment,the dense point cloud was imported into Lidar 360 software (Beijing Digital Green Earth Technology Co.,Ltd.,Beijing,China).The ground Lidar module TLS editing tool cut the point cloud model according to the plot boundaries.The straight-through filtering denoising method was then used to reduce the noise of the sample point cloud.After completion,manual tools reprocessed extra point clouds to improve the quality of data (Fig.5).The model could be viewed and used to extract DBH,tree height and other stand factors.The filtering of ground points was carried out by setting parameters such as mesh size,ground point thickness,window smoothness and adjacent window size.The purpose of generating the key points of the model was to retain the key points on the terrain,and relatively thin the points on the ground to obtain a sparse point set that retains the key points on the terrain.The terrestrial point was separated and the digital elevation model (DEM) was generated.Simultaneously,we normalized the filtered point cloud data by the DEM to remove the effect of terrain fluctuation on cloud data.A layerstacking algorithm was used to generate seed points;the thickness of the cutting layer was set as 0.5 m and the minimum tree spacing as 1.5 m.At the same time,a seed-point single wood segmentation program was used to extract the single wood,and then the point cloud of each tree after segmentation was stored in the LiData file.The X,Y and Z coordinates of each tree were extracted according to the corresponding tree ID information.
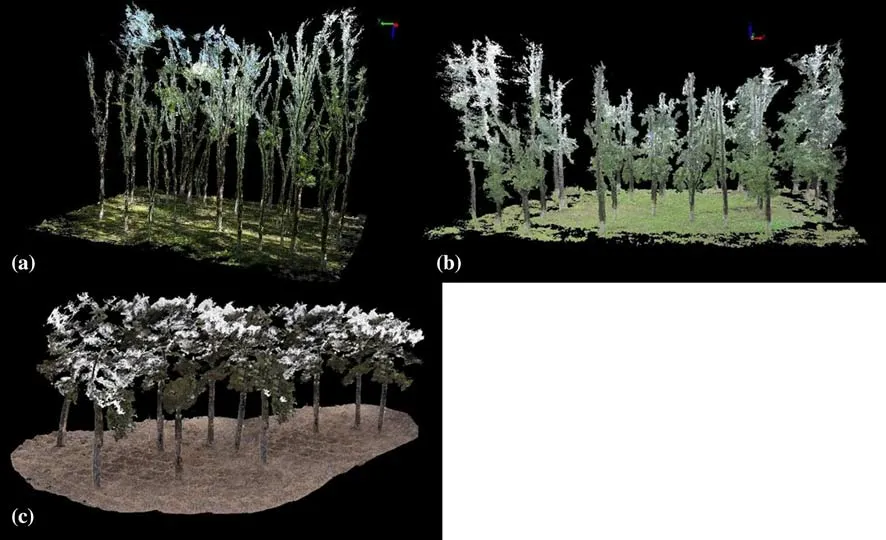
Fig.5 3D point cloud display of sample plots;a young broadleaved forest;b middle-aged broadleaved forest;c nearly mature coniferous forest
Extraction of DBH
Hough transform principle for detecting circles
The standard Hough transform (SHT) technique is a two-coordinate space transformation that produces curves or lines with the same shape in one image space map to another parameter space.These curves or lines form a point in parameter space(Nguyen et al.2008).By counting the number of points in different coordinate positions in parameter space and taking the coordinates of the number of points reaching the peak value as the parameters of the detected shape (curve or line),any shape can be transformed into a statistical peak value via this process.
In this study,the Hough transform technique was used to detect circles to extract DBH.The general parametric equation of a given circle is given by Eq.(1):
where,a,bare the coordinates of the center of the circle,andris the radius.
The parametric space coordinate system was established witha,b,andras the coordinate axis.Every point in the image space (xi,yi) then has a corresponding conical surface in parameter space.The set (xi,yi) of all points in the image space was mapped to the parameter space,and conic clusters were formed by the corresponding conic surfaces(Fig.6).If all points in the set belong to the same circle,the conic clusters formed by it will intersect at a point in the parameter space (a0,b0,r0),and the intersection point is exactly the center and radius of the circle on the image plane.
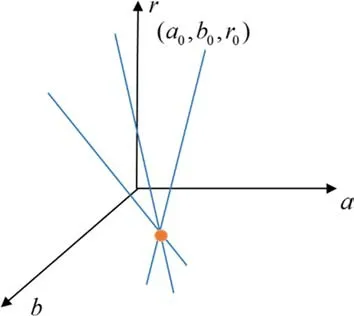
Fig.6 Distribution of the corresponding points in parameter space
Data slice and binary processingSince the input data for the Hough transform’s circle detection method were two-dimensional images,it was necessary to slice the point cloud data before extracting DBH to obtain the data layer with a certain thickness,and finally convert the data into two-dimensional images.Slicing too thinly will lead to too few measuring points,which is difficult to detect at a later stage,and noise has considerable influence on the detection results.If the slice is too thick,too many points will be detected and too many circles will be difficult to fit.Referring to the DBH extraction test of reference slices by Kenneth et al.(2014),the slices were 10-cm and obtained with the Lidar 360 software function.Highly normalized data were captured from 1.25 to 1.35 m in the point cloud data,a 10-cm layer of point cloud data was generated and imported into Matlab software.A 1 cm × 1 cm resolution raster image gray value was generated.The number of scanning points ‘n’contained in the cell (10 cm × 1 cm × 1 cm) determined grayscale value of each pixel.If the number of scanning points was > 3,the grayscale value of the pixel was set to 255;otherwise,the pixels were assigned values of zero(Fig.7).Since the detection results obtained by the Hough transform method were numerous approximate circles,the detection results needed to be taken from point clouds within the radius of outward expansion and inward contraction of 2%.The values of these points to the center ofeach circle were calculated and the average values taken as the center and radius of the detected circle.

Fig.7 Slice binary image;a global raster grayscale image;b local magnification
Extraction of tree height
The extracted DBH centroid coordinatesx,ywere used to extract tree height.According to the continuous growth method of singletree modeling,the point cloud was continuously grown at the extracted DBH centroid coordinates.According to the extracted coordinates,the point cloud area within the radius of 2.5 × DBH from each center was divided along the direction of thezvalue so that the point cloud was divided into a cylinder.The point cloud inside the voxel of each cylinder was sorted by thezvalue.If there were more than 10 laser points in the voxel with a height of 5 cm,thezvalue was replaced by the highest point (i.e.,the maximumzvalue point) in the cylinder.The algorithm was repeated until there were more than 10 laser points in the range within 5 cm of the highest point.The finalzvalue was taken as the highest point algorithm flow of the tree,as shown in Fig.8.

Fig.8 Algorithm flow chart
Principle of forest factor calculation
The purpose of establishing sample plots was to obtain stand factor data at a fixed time and fixed location.The observations of specific trees were calibrated to monitor forest growth and used to extract stand factor data and stand characteristic factors such as average DBH and height,stand density and volume were obtained by simply measuring the parameters of trees in the sample plots.The main calculation principles were as follows:
The average DBH of stands is a quantitative index reflecting the thickness and thinness of the trees usually expressed byD.The average DBH was calculated with Eq.(2):

The average stand height is a quantitative index to reflect the growth status of the trees and an important basis reflecting stand quality.the average height of stands,was calculated using Eq.(3):

Tree density is the number of trees per unit area,which is the most commonly used density index.Tree densityNwas calculated with Eq.(4):

wherenis the number of trees;the unittree/ha,andSthe area in the test.
Stand volume is the sum of individual tree volumes and a basic index reflecting the overall scale of forest resources.M,the stand volume,was calculated using Eq.(5):

whereMis the volume of the stand andVi(i=1,2,3,…,n)the volume of treeiin the plot.The unit is m3hm ‒2,nthe number of trees in the plot,andSthe area in the test.The derivation of the form number model derived by Cheng et al.(2017) was used to calculate the volumes of the sample trees,and the equation was Eq.(6):
wherefi(i=1,2,3,…,n) is the derivation of the form number (see Table 3) of treeiin the stand,di(i=1,2,3,…,n) the DBH of treeiin the plot,andHi(i=1,2,3,…,n) the height of treeiin the stand.
Accuracy assessment
The measured DBH,height and position of the trees in the plot were used as references.The measure of positional accuracy was the percentage of trees detected relative to their position (Xu et al.2014;Berveglieri et al.2017;Mulverhill et al.2019).The bias,root mean squared error(RMSE),relative bias (rBias),and relative RMSE (rRMSE)were employed to verify the precision,defined by Eq.7‒ 10,respectively.

whereyiis theith estimate,yntheith reference,the mean of the reference values,andnthe number of estimates.Relative bias and RMSE were also used to evaluate the mapping results and were calculated by dividing bias and RMSE by the mean of the reference values.
Results
Evaluation of the accuracy of DBH and tree height estimation
The measurements of the three sample plots with a diameter caliper and a NTS-391 total station instrument were used as the reference values.Video photography measurements wereused to restore the 3D point cloud and measure the DBH and heights (Table 4).The DBH accuracy was acceptable because the maximumrBiaswas 2.3% and the minimum was 2.2%;the maximum rRMSE was 5.7% and the minimum 2.1%.This degree of accuracy meets the requirements of forest inventories.

Table 3 Calculation results of other stand factors based on image point cloud data
For tree heights compared with the reference value,the bias was greater than 3.3 m and the RMSE greater than 5.2 m,which indicates that the results of the height estimates did not have good agreement with the observed values.In the three forest plots,the maximum value ofrBiaswas −21.9%,the minimum −3.1%;the maximum value of rRMSE was 36.3% and the minimum 2.7%.Although considerable efforts have been made in measuring tree heights,there are numerous factors affecting its estimation and many that lead to large extraction errors.The main reason is that,with video photography,the canopy blocks a single treetop and the image is not clear.However,it is still a good method to measure heights even though it is not ideal.
Evaluation of the accuracy of tree position
The 3D point cloud based on video photography was the basis of subsequent stand parameter analysis and extraction.The location accuracy was obtained by comparing field measurements with the tree position estimates from video photography (Table 5).The maximum bias was 0.272 m,the minimum 0.146 m,the maximum RMSE was 0.342 m,and the minimum 0.233 m;these met the first-class error requirement of a secondary forest inventory.
Calculation of other stand parameters
After obtaining basic stand information,important indices such as average DBH and height,stand density and volume were calculated based on relevant principles and calculation methods.These results were highly valuable for reflecting the overall condition of the stands (Table 6).As the general tree density was low,the sample plots were sparse.Average DBH and heights of all were similar,indicating that theoverall growth of the trees in the sample plots was uniform.The spatial structure of the plots had few differences and stand characteristics were relatively consistent.
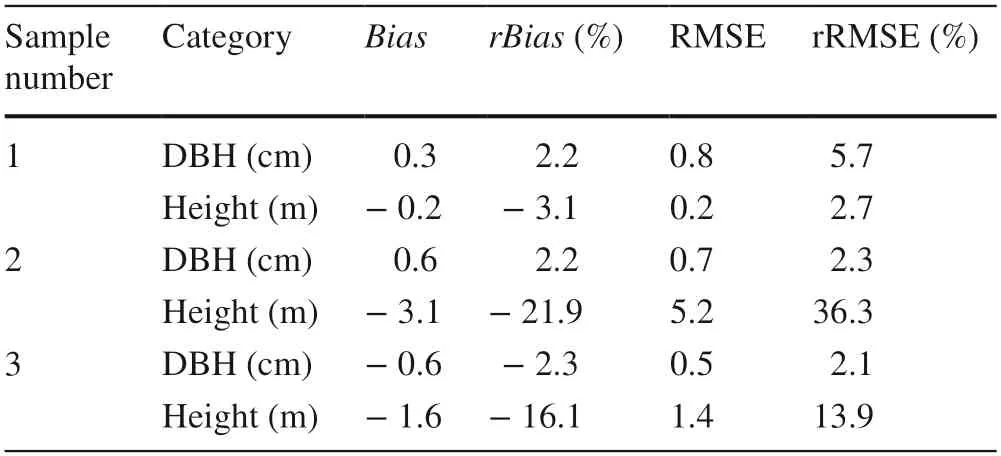
Table 4 Comparison of DBH and height estimates based on point cloud data and field measurements

Table 5 Comparison of tree position utilizing videobased estimates and field measurements

Table 6 Calculation results of other stand factors based on video point cloud data
Discussion
Through field tests in three sample plots,our results show that a handheld camera is suitable for mapping the point cloud of a plot and has considerable potential in forest inventories.The completely modeled point cloud of the sample plots could be formed by rotating video photography.Since coordinate information was not introduced in the research,the original point cloud that was generated did not have measurable proportional relations.This study proposes modifying the proportional relations of point clouds by using a fixed-length sight rod when photographing.Simultaneously,during sample observations to ensure the accuracy of data collection,the data should be analyzed strictly according to the description in Fig.3.These data are the key factors for accurately calculating the video images.To test the reliability of the system,field and point cloud estimation data were used to evaluate tree factors and stand parameters,and the results show that the method is highly precise.
The important advantage of this method is that it combines the convenience and efficiency of video dynamic photography.By using fixed-length sight rods to correct the proportions in 3D point clouds (Xu et al.2014;Yoshimoto et al.2014),accurate measurements of 3D sample point clouds can be achieved.Compared to the existing methods of real-time locations and photography (Ingwer et al.2015;Forsman et al.2016;Mikita et al.2016;Mlambo et al.2017;Frey et al.2018),video dynamic photography has the advantage of being lightweight and efficient and not particularly susceptible to signal effects as positioning instrumentsare.Although the 3D model established here did not have coordinate information,relevant stand parameters could be obtained to meet the requirements of forest inventories.DBH values extracted from 3D point clouds based on video photography were compared with field data from three sample plots (Fig.9).Our results are similar to the error of the DBH estimation.The RMSE (Fig.9 a) was 0.8 cm,the RMSE(Fig.9 b) was 0.7 cm,and the RMSE (Fig.9 c) 0.5 cm.Lu et al.(2020) reported an RMSE of 1.0 cm for plots using a backpack LiDAR system.Zhou et al.2019 found an RMSE of 0.7 cm for plots using a handheld Mobile LiDAR system.An RMSE of 1.2–2.8 cm for street trees using a Mobile Terrestrial Photogrammetry was reported by Roberts et al.(2019).Other studies (Aguilar et al.2019;Piermattei et al.2019;Wu et al.2019) reported the root mean squared errors of tree heights of 0.8–5.0 cm.Our findings indicate that the overall fitting effect was better and followed the same principle.This method extracted DBH through the Hough transform technique and detected circles in the point cloud model.This is an improvement of the simple circle fitting method (Forsman et al 2016;Koreň et al.2017),and the fitting accuracy improved.In addition,the difficulty and accuracy of extracting DBH were closely related to the topography.For sample plots with a single type of terrain and for flat terrains,DBH extraction was less difficult and the accuracy high.

Fig.9 Comparative analysis of the DBH extraction values based on the 3D point cloud and field values;a,b and c are height comparisons of plots 1,2,and 3,respectively
Comparisons between heights estimated by video point cloud and heights measured by the total station are shown in Fig.10.The RMSE in Fig.10 a was 0.3 m,in Fig.10 b 5.2 m,and in Fig.10 c 1.4 m.The estimation error increased with increasing height.The height estimates are similar to those obtained in earlier studies.For example,Lu et al.(2020)found an RMSE of 1.5 m,and in another study (Leeuwen and Nieuwenhuis 2010;Chen et al.2019) reported RMSE of height was 0.5–4.2 m.The main reason for increasing errors with increasing height is that photography has limitations,and it is difficult to extract high-altitude point clouds on the ground.The accuracy is obviously lower than UAV photography (Luke et al.2016;Mikita et al.2016;Frey et al.2018).In addition,because canopies are prone to movement by wind,noise was generated when the point cloud was acquired that affected height extraction results.To address the limitations of ground photography,this study introduced a continuous growth model to estimate individual tree height.At present,height can be determined by video photography,especially if the sample canopy is not obscured.However,the precision of the extraction and application effect does not guarantee that crown densities of coniferous or deciduous tree species will not affect the measurement.To improve the extraction accuracy of tree height,the validity of the 3D point cloud of the entire tree(including roots and crown) must be ensured.

Fig.10 Comparative analysis of tree height extraction values based on 3D point clouds and field measurements;a,b and c are height comparisons of plots 1,2,and 3,respectively
To verify further the accuracy of DBH and height extractions,a line graph of the estimated and reference values is shown in Fig.11.The extracted values of tree height were generally lower than the measured values;the error was consistent with the increased of canopy closure with height.This was caused by the closure of crowns and the misclassification of shrubs near the ground into topographic classification points,resulting in the ground digital values being higher than actual values.This is similar to results of Liu et al.(2018) and Lu et al.(2020).Other issues such as errors between extracted DBH values and measured values were caused by various uncertain factors.These included the parameter selection of the corrosion mode of in draw and outspread during the circle fitting by Hough transform(Yao and Yi 2016;Dalitz 2017),surface texture,and the influence of laser reflection characteristics,and therefore the correlation was low.
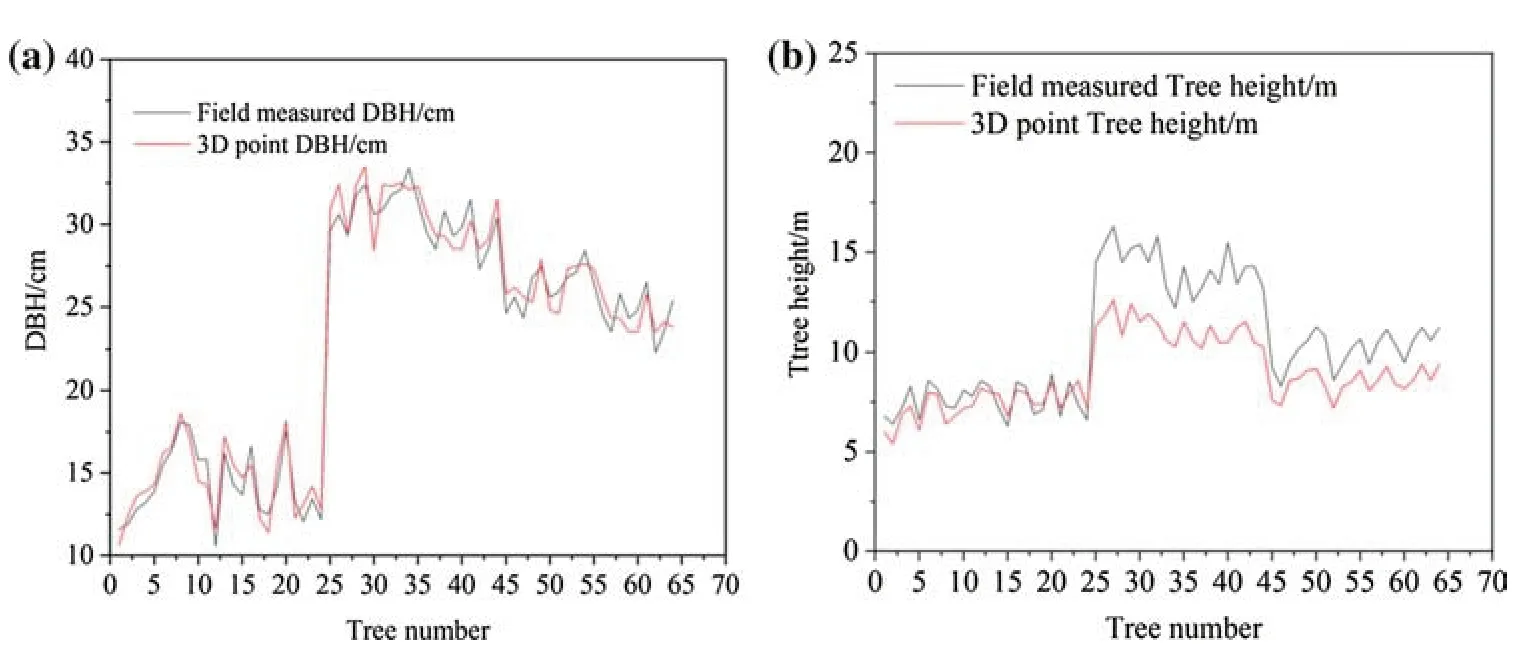
Fig.11 Estimated and reference values of DBH and height;a the comparative analysis of DBH;b the comparative analysis of height.The tree number in plot 1 was 1–25,the tree number in plot 2 was 26–45,and the tree number in plot 3 was 46–64
In addition to the accuracy,the video photography method was effective and economical.Compared with the traditional survey method,this method has the advantage of high measurement efficiency.Moreover,video photography can considerably reduce on-site working time,which lowers the investment in workers and labor costs.Additional investments in video data acquisition equipment and experienced professionals can be reduced.However,due to the large amount of data in video images,there are substantial requirements for hardware and software platforms for data processing.Therefore,more hardware is required with a high configuration.Another advantage of video photography is that it can restore the real image of a scene.Furthermore,it can provide useful reference for monitoring tree growth and insect pests,and survey data for resource studies.Although this method can obtain accurate results,due to the closure between trees,this method can only be used when the canopy density is moderate.
In forests with high-density canopies,the applicability of this method and the accuracy of parameter estimation are affected and it is difficult to achieve satisfactory results(Kaartinen et al.2015;Kukko et al.2017).
Conclusions
In this study,a new method of singletree mapping for inexpensive hand cameras based on video photography was developed.A series of densely overlapping images were photographed around sample plots using a compact pocket camera.Point clouds were generated and converted from two-dimensional space to 3D space.DBH and height based on the Hough transform model and a continuous growth method of singletree modeling were automatically extracted.The results show that terrestrial video-based point clouds can provide some stand parameters.The RMSE of the estimated DBH was 0.6 cm for individual trees,which was similar to field measurements and is acceptable for forestry inventories.
The main advantages of video-based point cloud data are the low cost,the equipment needed is easy to carry,field measurements are simple,and data processing is automatic.The requirements for professional training and additional investments for equipment are reduced.However,this method also has limitations.The applicability and precision in dense forests are limited due to the interference of shrubs or grasses and the blocking of instrument observations.In future research,these limitations may be overcome by adjusting the observation path or by combining multiple devices.Future research should be carried out under more complicated canopy conditions such as forests with different canopy densities,tree species,and topographic conditions.
AcknowledgementsWe are grateful to the staffof the Precision Forestry Key Laboratory of Beijing,Beijing Forestry University.We are also very thankful for the prompt response of the Journal of Forestry Research and its reviewers.The reviewers’ comments were highly beneficial for improving the manuscript draft.
Author contributionsZZ and ZF conceived and designed the experiments;ZZ and JL performed the experiments;ZZ and YL analyzed the data;ZZ wrote the main manuscript.All authors contributed in writing and discussing the paper.
杂志排行

Journal of Forestry Research的其它文章
- Flexible transparent wood enabled by epoxy resin and ethylene glycol diglycidyl ether
- Diversity and surge in abundance of native parasitoid communities prior to the onset of Torymus sinensis on the Asian chestnut gall wasp (Dryocosmus kuriphilus) in Slovenia,Croatia and Hungary
- Ozone disrupts the communication between plants and insects in urban and suburban areas:an updated insight on plant volatiles
- Testing visible ozone injury within aLight Exposed Sampling Site as aproxy for ozone risk assessment for European forests
- Logging and topographic effects on tree community structure and habitat associations in a tropical upland evergreen forest,Ghana
- Spatial pattern dynamics among co-dominant populations in early secondary forests in Southwest China