基于CAN总线的主动光学镜面位姿驱动系统研究*
2021-07-15肖心怡张宗猛杨德华吴常铖金振宇
肖心怡,张宗猛,杨德华,吴常铖,金振宇
(1. 南京航空航天大学自动化学院,江苏 南京 211106;2. 中国科学院云南天文台,云南 昆明 650216)
随着现代天文学的快速发展,主动光学技术在保证望远镜优秀像质的前提下,使制造大口径天文望远镜成为可能[1-2]。我国建造的500 m口径球面射电望远镜(Five-hundred-meter Aperture Spherical radio Telescope, FAST)采用主动反射面技术,基于CAN总线实现控制器对数据的接收与传递,驱动电机控制位移促动器的运动[3]。国家重大科学工程大天区面积多目标光纤光谱天文望远镜(也叫郭守敬望远镜, Large Sky Area Multi-Object Fiber Spectroscopy Telescope, LAMOST)采用拼接镜面主动光学技术,基于以太网进行系统通信,采用集中分布式控制位移促动器,调整镜面位置[4]。
先进地基太阳望远镜主镜拟采用主动光学技术实现8 m的观测口径。本文为先进地基太阳望远镜的主镜位姿调整的预研需求,借鉴500 m口径球面射电望远镜和郭守敬望远镜等镜面主动控制的成功经验,研究了一种基于CAN总线的镜面位姿驱动系统。首先针对主动支撑样机实验系统,通过镜面位姿运动学分析,解算位移促动器输出与镜面位姿之间的关系,并根据工程应用中的基本需求,给出基于步进电机集成行星减速器的位移促动器的控制指标;构建了分布式架构的镜面位姿驱动系统,即单独控制每个步进电机,再由主控制器管理各个子控制器。具体来讲,每个子控制器只需控制一个步进电机的脉冲个数、脉冲频率、方向、启停等状态[5-7];选用STM32设计1个主节点和3个子节点,实现了位移促动器的控制;选择CAN总线通信技术进行子控制器与主控制器的数据传输。这种基于CAN总线的分布式一对一的控制架构有效减轻了主控制器的负担,子模块独立性好,提高了位姿控制系统的灵活性。
1 镜面位姿驱动系统总体设计方案与系统搭建
本文实验利用一个700 mm口径普通平板玻璃主动支撑样机实验系统(图1(a)),具有9点轴向气动支撑及6杆式3自由度(Piston,Tip/Tilt)位姿主动调整机构[8],并设有线性可变差动变压器(Linear Variable Differential Transformer, LVDT)位移传感器件。基于这一样机实验平台,对本文研究的基于CAN总线的镜面位姿驱动系统展开实验测试,包括系统稳定性、重复性等测试,并对误差进行分析与校正。通过控制3个位移促动器完成主镜位姿驱动,3个位移促动器均匀分布在主镜面上,其中位移促动器分布半径Rd=206 mm。3组位移促动器及其二力杆机构能够实现对主镜3个自由度的主动调节功能,为实时监测位移促动器的输出位移,在位移促动器上集成了一个位移传感器线性可变差动变压器[9],具体调整机构如图1(b)。
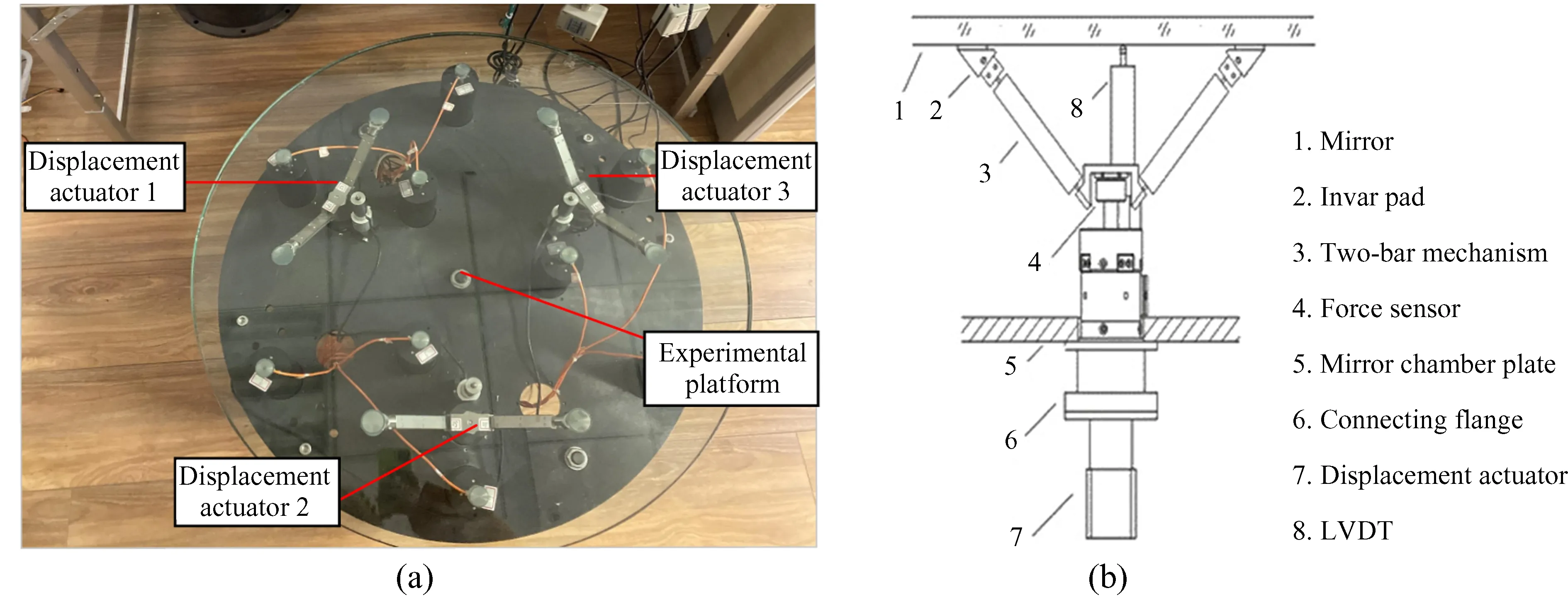
图1 实验系统搭建Fig.1 Experimental set up system
1.1 镜面运动学原理
从运动学角度出发,将主镜面的质心设为原点,镜面为xoy平面,光轴的方向为z轴,建立如图2的主镜面位姿解算坐标系。

图2 镜面位姿解算坐标系Fig.2 Mirror coordinate system definition
主镜的位姿调整是通过控制3个位移促动器完成的,图中d1,d2和d3分别为调整后位移促动器的位置,Rd是3个位移传感器所在圆环半径。由3个位移促动器输出的位移量可以计算主镜绕x轴的转动Rx和绕y轴的转动Ry以及沿z轴的平动Z:
(1)
(2)
(3)
由(1)、(2)和(3)式可以得出Z,Rx,Ry与d1,d2,d3之间关系为
(4)
对(4)式反解可得出d1,d2,d3与Z,Rx,Ry之间的关系。
由运动学分析理论公式(1)可知,当d1与d3在同一水平位置保持不变时,Rx的输出分辨率仅与d2有关,计算位移促动器d2的最小分辨率为
(5)
同理,当d2保持不变时,Ry的输出分辨率与d1和d3有关,位移促动器d1和d3的最小分辨率为
(6)
1.2 镜面位姿驱动系统整体方案设计
1.2.1 基于CAN总线的位姿驱动系统架构
综合考虑总线的信号线数、通信类型、支持多主方式、通信距离、通信速度以及允许的节点总数等因素,本文选择CAN总线作为主节点与子节点之间的通信。CAN是一种采用串行数据通信协议完成控制与测试仪器之间数据交换的总线,可以支持实时控制和分布式控制。通信过程如图3,包括微控制单元(Microcontroller Unit, MCU),CAN控制器和CAN收发器[10]。MCU首先将报文发送给CAN控制器,CAN控制器将报文解析成逻辑信号,再发送给CAN收发器,最后通过CAN_H和CAN_L两根总线将电信号传输到CAN总线,使用CAN通信不仅能够减少硬件电路所需线束,还提高了系统的可靠性,同时在一定程度上节约了成本。

图3 CAN节点通信原理图Fig.3 Schematic diagram of CAN node communication
主镜位姿驱动系统整体架构如图4。系统由上位机、MCU模块和下位机3部分组成。上位机部分主要负责接收MCU模块通过以太网发送的传感器数据,与设定数据对比,进而对位移促动器的模式进行设定,向MCU模块发送控制命令,并对数据进行保存和实时显示;MCU模块负责通过CAN总线接收下位机子节点的传感器信号,传递给上位机系统,并将接收的上位机控制命令通过总线传输到相应的子节点;下位机主要负责把子节点采集的模拟信号通过模数转换模块转换成数字信号,再通过总线发送到主节点,并执行促动器控制命令。该系统具有传输速率快、兼容能力高、容错能力强及扩展性好等优点。
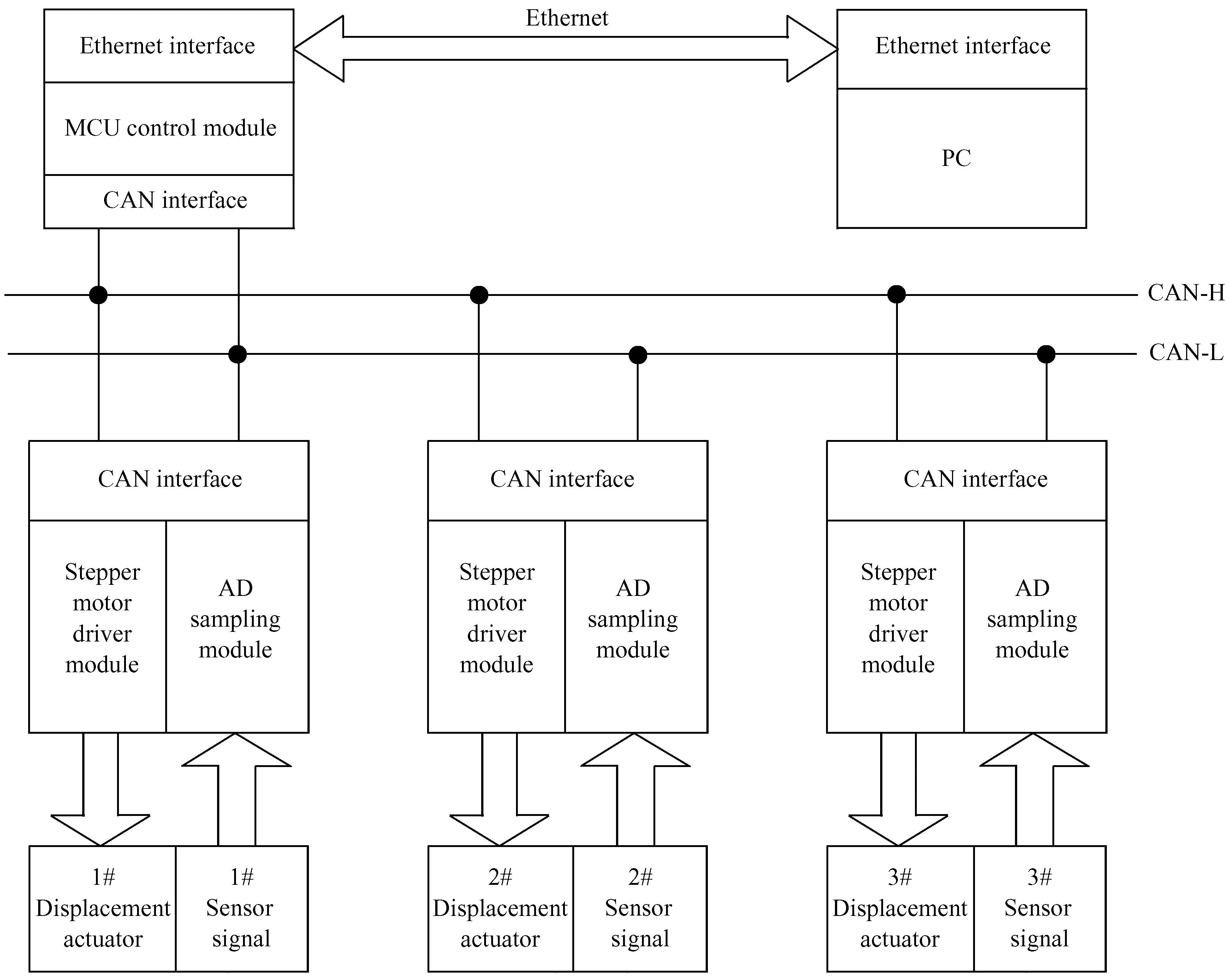
图4 系统架构图Fig.4 System architecture
系统的硬件设计主要包括主节点的MCU模块、CAN通信模块、以太网通信模块、子节点的模数转换采样模块和电机驱动模块。上位机的软件设计包括测试界面设计,以及对以太网通信模块进行程序的编写与调试,用于验证以太网通信能否实现与下位机的数据传输。下位机的软件设计分为主节点和子节点软件设计,主节点的软件设计是实现与上位机的通信功能及通过CAN总线与子节点的数据传输;子节点的软件设计是实现CAN通信,完成步进电机驱动控制以及传感器数据的采集。
1.2.2 位移促动器-步进电机的加减速特性设计
本文中位移促动器的动力元件是步进电机,设计合理的步进电机加减速特性来确保位移促动器的平稳运行。利用控制脉冲个数控制角位移量,脉冲由微控制器定时器的PWM信号产生,将脉冲信号输入电机驱动器来驱动电机运行。位移促动器的控制采用分布式架构,因此要考虑对3组位移促动器的协同控制。将3组位移促动器分别运动200 μm,300 μm及500 μm,设置不同的频率,得到3组位移促动器运行曲线如图5。由图5可知,由于3组位移促动器同时运动,主镜实验样机的机械结构本身造成位移促动器d1方向的位移量较多,而位移促动器d2,d3由于开环运行产生丢步现象,经过闭环控制后3组位移促动器在35 s时都到达了设定的目标位置,即位移促动器协同控制方法能够满足实际需求。
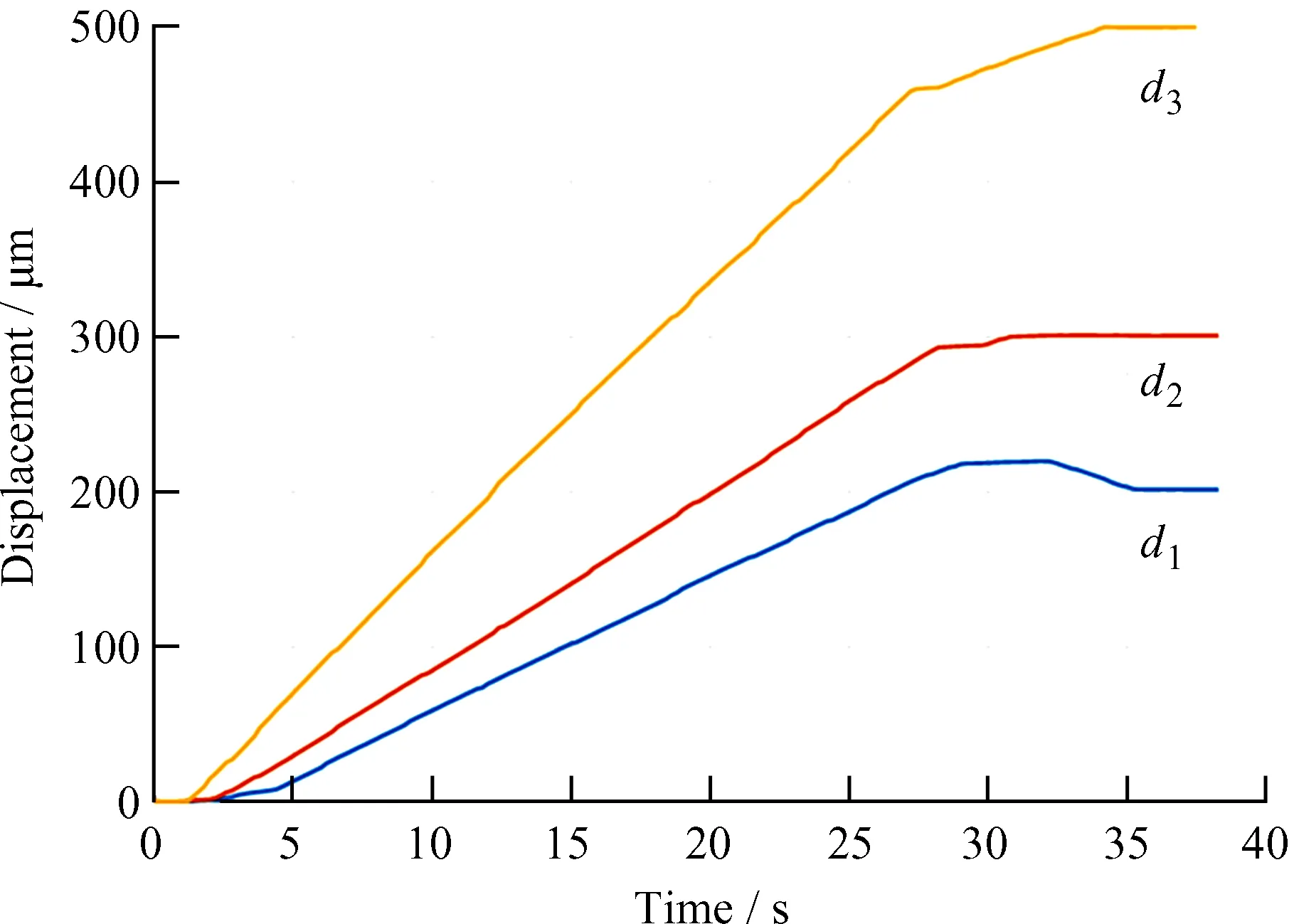
图5 位移促动器协同运行曲线图Fig.5 Synchronization of the three displacement actuators
2 镜面位姿驱动系统实验测试与结果分析
2.1 镜面位姿驱动系统
参见图1(a),实验过程中采用激光位移传感器和倾角仪测量主镜的位姿状态,用姿态角度传感器检测镜面的两个转动位置,用激光位移传感器检测主镜在z轴方向的平动位置[11]。采用图6所示的位姿驱动测试系统,在不考虑电机细分的情况下,位移促动器的最小分辨率的均方根误差为0.1 μm;若主镜倾斜调整Rx和Ry的基本输出分辨率的均方根误差为1″,根据(5)式和(6)式,位移促动器d2的分辨率均方根误差须达1.7 μm,位移促动器d1和d3的分辨率均方根误差须达1.8 μm。
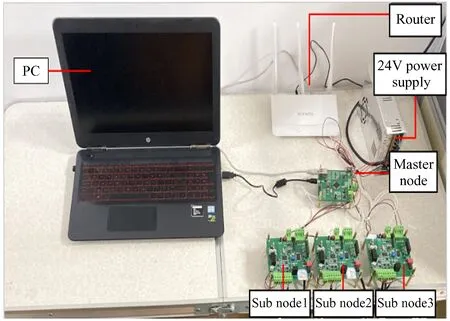
图6 位姿驱动测试系统Fig.6 Mirror aligning test system
2.2 位移促动器的性能测试
通过测试位移促动器的最小可控步长来测量位移促动器的校正能力。在5 kg负载下,将位移促动器的控制器设置为无细分情况,连续给出相同步进量(每次5步),得到输出最小校正能力测试曲线如图7,根据图7可知,位移促动器在无细分情况下能实现最小步长均方根误差(位移分辨率)优于1 μm。
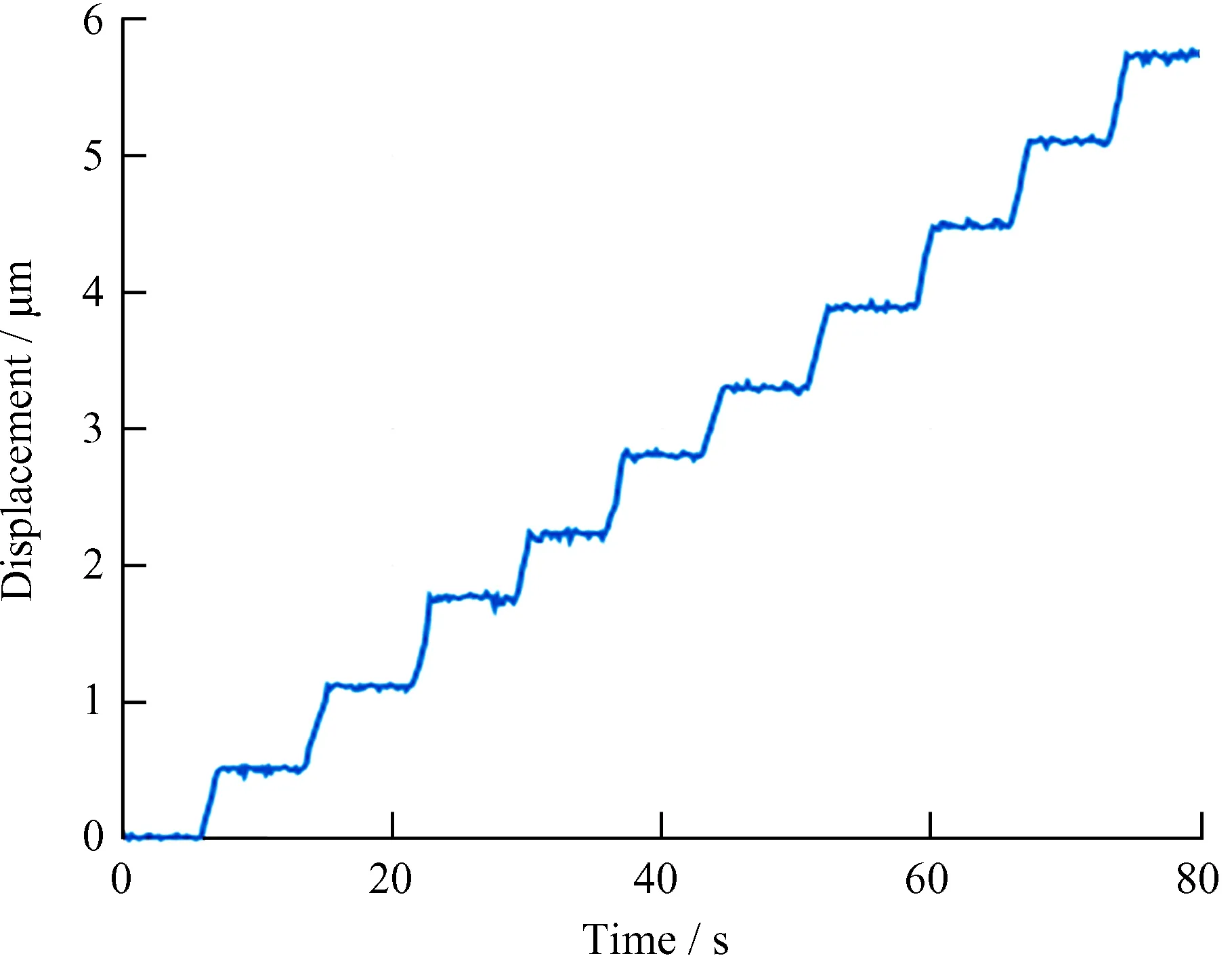
图7 位移分辨率曲线Fig.7 Test of displacement resolution
由位移促动器中的线性可变差动变压器实时反馈位移促动器的位置与目标位置进行比较,补偿驱动,完成位移促动器闭环控制。闭环控制位移促动器运行10 μm,用线性可变差动变压器与激光位移传感器同时记录位移促动器的运行曲线,如图8。由图8可知,线性可变差动变压器与激光位移传感器记录位移促动器闭环控制的实际位移量与目标位置偏差的均方根误差都在1 μm之内,位移促动器能够实现位移闭环输出精度均方根误差优于1 μm。
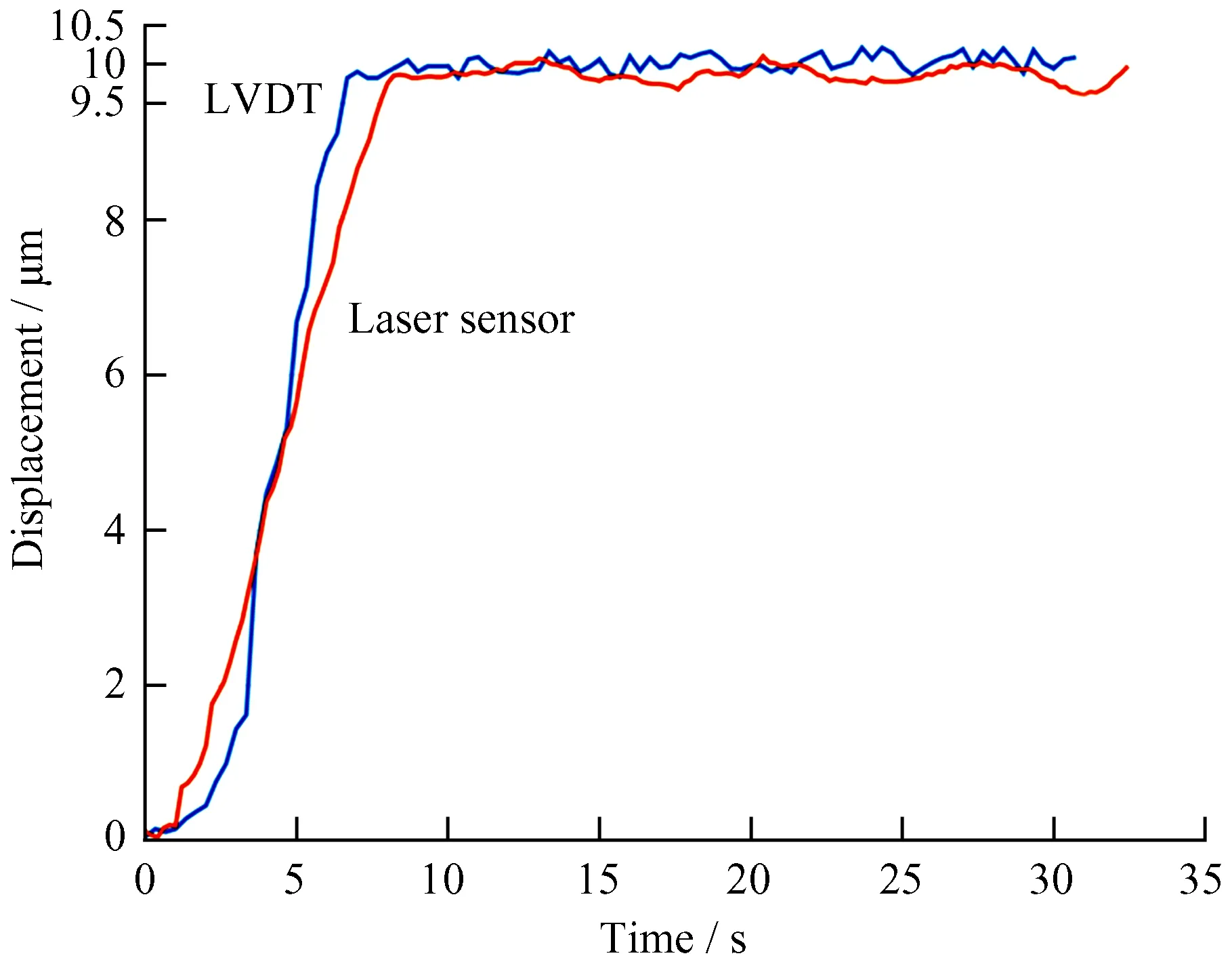
图8 位移促动器闭环控制曲线Fig.8 Closed loop control of displacement actuator
2.3 镜面位姿驱动实验系统性能测试
将主镜位姿驱动系统实验样机的3组位移促动器都调整到水平位置,静止放置于实验室的环境下,利用倾角仪记录系统的Rx与Ry的变化,激光位移传感器记录系统z轴方向的变化,得到Rx,Ry的稳定性曲线如图9(a),z方向的稳定性曲线如图9(b)。由图9可知,Rx与Ry的静态均方根误差不超过 ± 0.2″,z轴方向静态均方根误差不超过 ± 0.4 μm,系统有较好的稳定性。
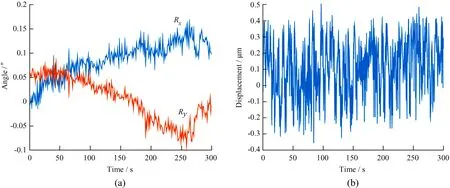
图9 系统稳定性测试Fig.9 Test of system stability
通过闭环控制对主镜位姿驱动系统进行重复性测试。调整3组位移促动器的步进位移量,让每组位移促动器分别移动120 μm,200 μm及 -150 μm,往返执行5次。利用激光位移传感器同步测量系统z轴方向的位移,同样利用倾角仪来测量Rx与Ry。图10(a)为Rx的重复性曲线,图10(b)为Ry的重复性曲线,图10(c)为z轴方向的重复性曲线。
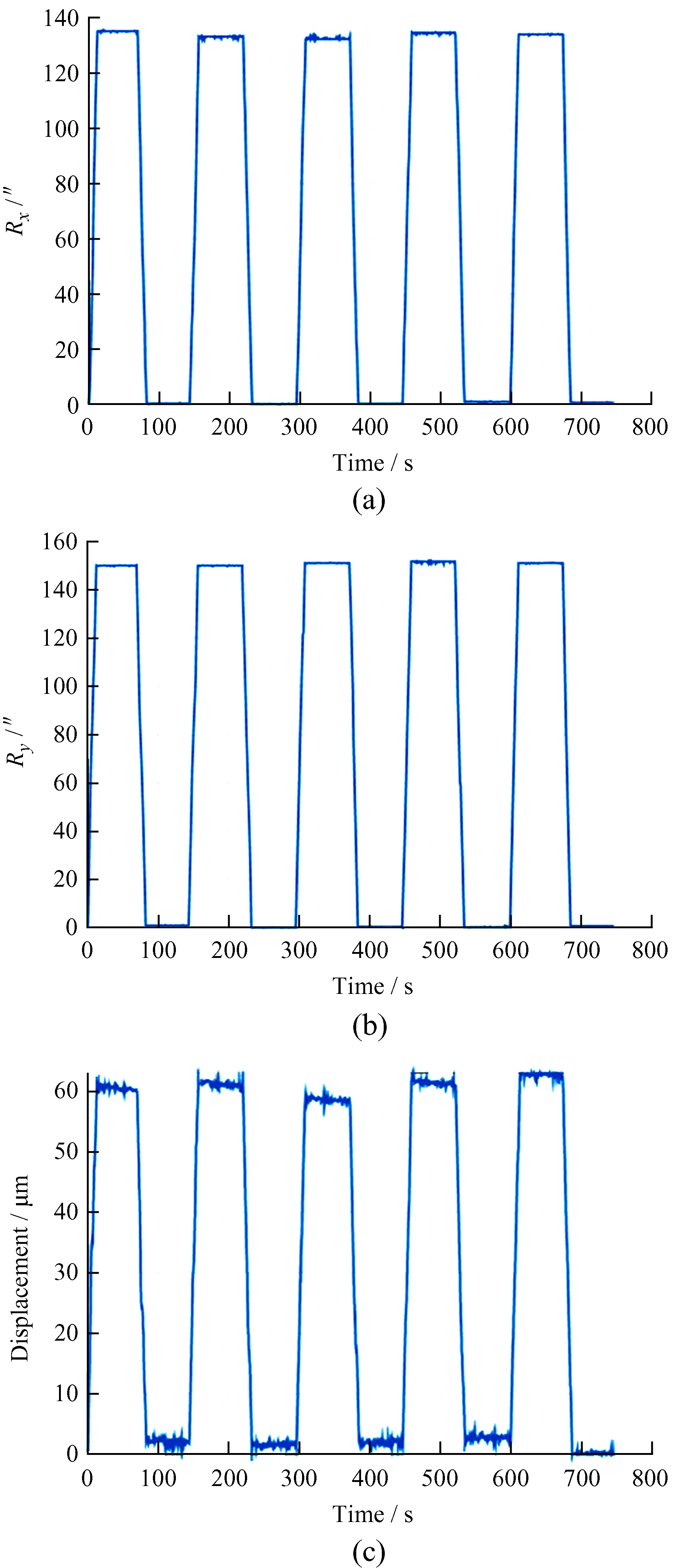
图10 系统的重复性测试曲线Fig.10 Test of system repeatability
根据Rx,Ry重复性曲线图可知,系统的重复均方根误差为2″,z轴方向的重复性均方根误差为3 μm。误差是由系统的机械结构、实验室环境等因素造成,因此利用线性可变差动变压器对之进行闭环校正。系统闭环校正后的绕x轴的转动曲线如图11(a),绕y轴的转动曲线如图11(b),绕z轴的转动曲线如图11(c)。由校正后的曲线图可知,Rx与Ry的稳态均方根误差优于1″,z方向的稳态均方根误差在1 μm以内。

图11 镜面位姿闭环调整测试Fig.11 Test of the mirror closed loop alignment
3 总 结
本文针对光学镜面位姿主动调整系统设计了一套基于CAN总线通信技术的位姿驱动系统,使用CAN总线通信技术实现主节点与子节点之间的数据传输,建立分布式系统架构控制位移促动器内部的步进电机,完成系统软硬件设计,对驱动系统进行实验测试。实验结果表明,基于线性可变差动变压器位移闭环,位移促动器的控制精度的均方根误差达1 μm,Rx与Ry的稳态均方根误差都优于1″,z方向的稳态均方根误差在1 μm以内。本文采用CAN总线实现了主动光学镜面3自由度位姿调整控制初步探索,为我国在研的先进地基太阳望远镜主镜支撑系统提供了技术储备,也可用于其它主动光学镜面变形的力促动器的分布式控制。