两镜拼接主动光学子镜位姿调整方法研究*
2021-07-15姜治渝陆金娴杨德华吴常铖金振宇
姜治渝,陆金娴,杨德华,吴常铖,金振宇
(1. 南京航空航天大学自动化学院,江苏 南京 211106;2. 中国科学院云南天文台,云南 昆明 650216)
中国巨型太阳望远镜(Chinese Giant Solar Telescope, CGST)拟采用环型拼接镜面主动光学技术实现具有8 m口径的环型主反射镜面,主镜拟采用24块子镜拼接成直径为8 m、宽为1 m的环型[1]。相比于世界上现有的大型望远镜如美国Keck[2]等采用的拼接主镜方案,中国巨型太阳望远镜采用正六边形子镜方案,由于此方案光学镜面之间能通过互锁形式确定探测子镜间的相对位置关系,因此,主动保持只需边缘传感器测量子镜间的边缘轴向位移误差的变化。中国巨型太阳望远镜的环形拼接方案若只用边缘传感器,将面临子镜自由度探测不足的问题,无法实现拼接镜面的主动保持[3],故需要增加倾斜传感器才能对子镜位姿的3个自由度进行探测[4]。边缘传感器用于探测子镜边缘的高度差,倾斜传感器用于探测子镜倾斜的变化量,从而推算子镜位置的变化情况,并通过各个子镜背面的位移促动器进行补偿调节,保持主镜的面型。
保持子镜间相对位置的关键是主动控制系统[5-6]设计,为验证上述主动光学子镜位姿调整方案的准确性,我们搭建一个两镜拼接主动光学系统,通过固定其中一块子镜,另一块子镜做3个自由度的主动位移,使两镜间的相对位置发生变化,从而模拟子镜拼接的主镜位姿变化的一般情况。
1 两镜拼接主动光学系统介绍
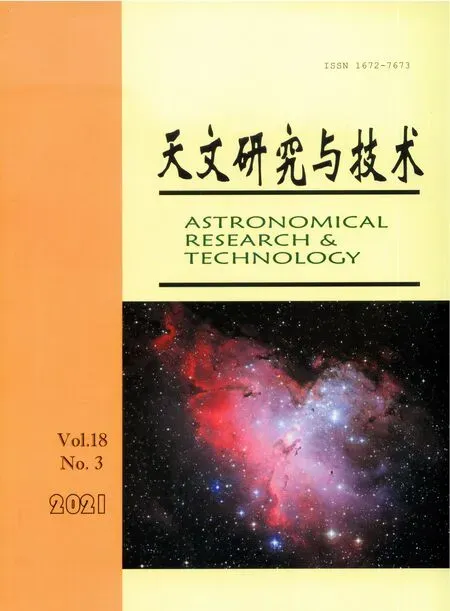
两镜拼接主动光学系统用于模拟8 m环型拼接光学镜面系统单元特征,具有研究对象的关键特性,能够反应研究的核心内容。如图1,两镜拼接主动光学系统主要包括两片相同的半圆形子镜、子镜支撑/定位机构、位移促动器、安全保护措施与底座。其中,半圆形子镜直径为300 mm,边缘厚度为40 mm,拼缝大约为2 mm,质量为3.2 kg。镜子基底材料采用微晶玻璃,两面反射子镜均采用3点支撑,反射表面面型误差约为5.2 nm。其中一块子镜固定不动,称为固定子镜;另一块子镜做3个自由度的主动位移,称为主动子镜,主动子镜由位移促动器实现不同自由度的精密调整。
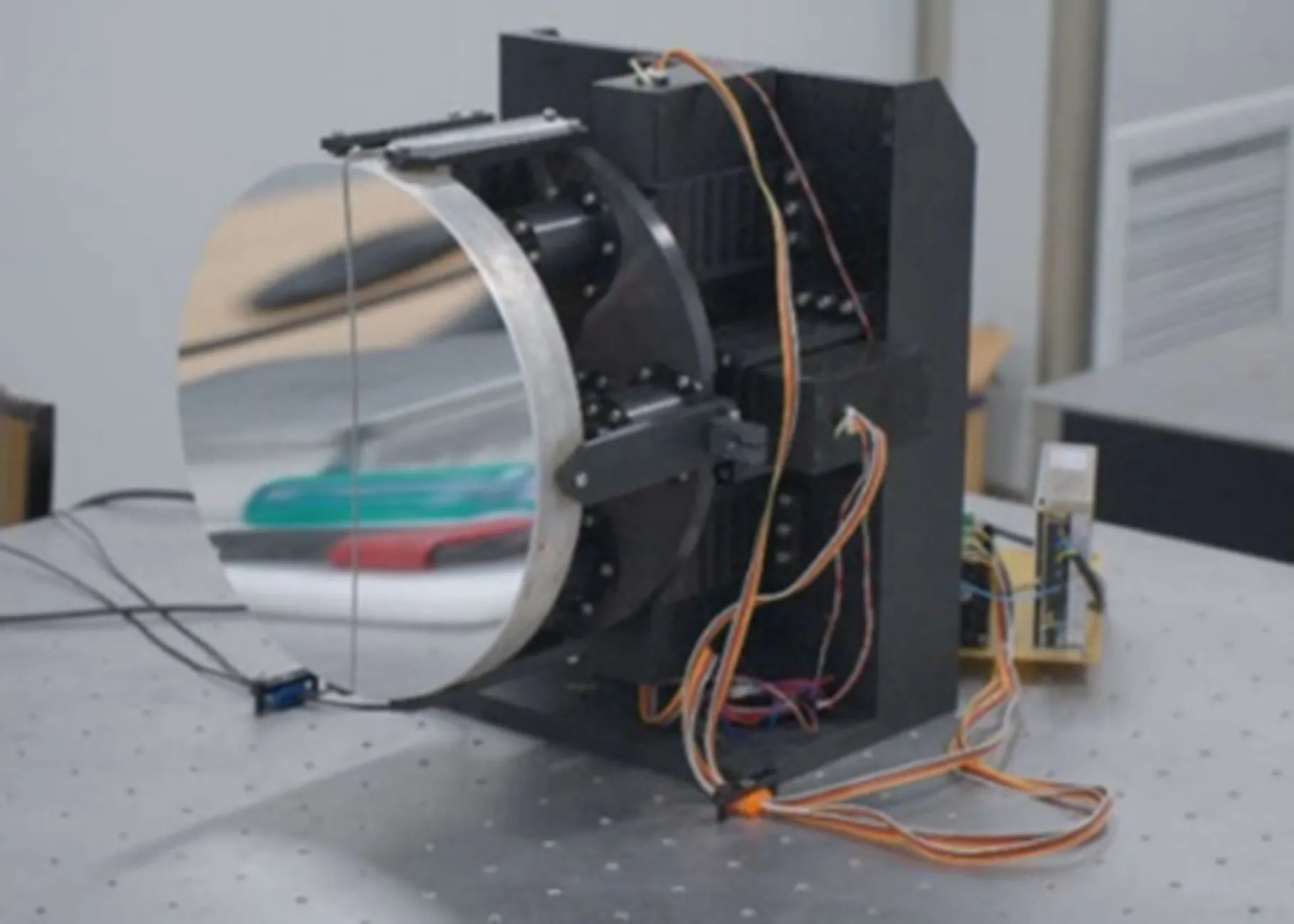
图1 两镜拼接主动光学系统Fig.1 Two-mirror segmented active optical system
位移促动器通过长度的变化量调节子镜的离面位移[7]。根据拼接镜面的工作原理,每个子镜需要3个位移促动器支撑并调节位姿,以实现子镜3个自由度的精密运动。系统采用的位移促动器具有大行程、大负载性能、高精度的优点,分辨率达10 nm级,功耗低,对气流影响小[8]。
2 子镜位姿检测方法设计
2.1 子镜轴向位移检测
经典的位移传感器主要安装在拼缝边缘,所以也称为边缘传感器,对于全孔径拼接镜面来说,由于子镜 “互锁” 功能的存在,只需检测边缘传感器的测量值即可得到子镜的相对位置关系,但是此方法也存在缺点,一旦边缘传感器出现故障,更换维护工作非常复杂。对于环型孔径拼接面来说,子镜之间没有 “互锁” 功能,为了检测子镜边缘的高度差,将边缘传感器安装在拼接光学镜面实验样机子镜边缘,边缘传感器的安装位置如图2。

图2 边缘传感器的安装位置Fig.2 Edge sensor configuration
实验系统选用的位移传感器为PI公司D-E30单级电容位移传感器,传感器的动态范围为50 μm,动态分辨率大约为2 nm。
2.2 子镜倾斜检测
倾斜测量采用一种基于数字相机激光倾斜角度的测量方法,倾斜系统装置由计算机、激光器和无镜头的数字相机组成,数字相机激光测角原理测试系统如图3。其中,数字相机通过USB串口连接到计算机,激光器垂直固定于光学镜面,并对准数字相机。由于激光光束准直性好,可认为激光器出射光为平行光束[9],激光器发出的光束直接到达数字相机。计算机获得转动前后的光斑图像,并计算光斑在数字相机靶面上的位移量,以获得拼接镜实验样机的倾斜角度,靶面坐标系上的光斑位置如图4。A0,A1为在数字相机靶面上移动前后的光斑坐标。设主动镜面绕x轴旋转角度为tip,可用θx表示,光斑在靶面坐标yy轴方向移动距离为ys,主动镜面绕y轴旋转角度为tilt,可用θy表示,光斑在靶面坐标xx轴方向移动距离为xs,激光器到数字相机距离为L,则它们之间的关系为

图3 数字相机激光测角原理测试系统
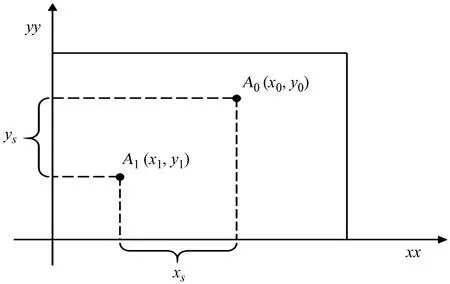
图4 数字相机靶面坐标系上的光斑位置
(1)
(2)
实验系统中数字相机像素为752(H)× 480(V),像元尺寸为6 μm × 6 μm,选用650 nm红光激光器,与主动镜镜室固连,以反映主动镜的指向,即tip/tilt的变化情况,距离数字相机1 725 mm,实物如图5。
图5 数字相机激光测角系统
3 子镜位姿调整控制
3.1 理论控制矩阵
控制矩阵可由位姿检测的传感器和位移促动器之间的相对位置决定,分析位移促动器、位移传感器和倾斜传感器之间的几何关系可以得到理论控制矩阵。图6为位移促动器及传感器布局,D1,D2和D3为位移促动器位置,呈等腰三角形排列;P1,P2为边缘传感器位置,呈对称分布;a为激光器,垂直安装于子镜边缘。
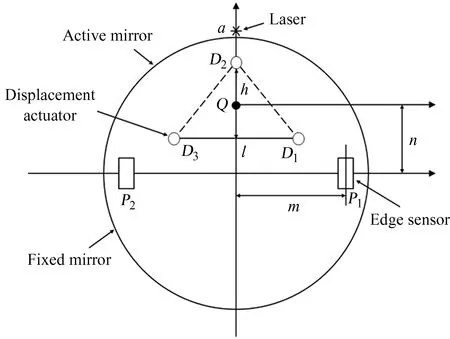
图6 位移促动器及传感器布局Fig.6 Layout of displacement actuators and sensors
设位移促动器的位移量为d1,d2和d3;主动镜面的轴向平移量为d0;主动镜面的相对二面角倾斜为Rx;主动镜面的相对交错倾斜量为Ry,则位移促动器的变化量到主动镜面的3个自由度变化量可表示为
(3)
3个位移促动器呈等腰三角形分布,h为高;l为底边。设Q为等腰三角形的重心;n1,n2,m1及m2分别表示Q点到P1,P2的垂直和水平距离。主动镜面的3个自由方向的变化量均可用边缘传感器和倾斜传感器的测量值表示,设边缘传感器的测量值为p1,p2,倾斜传感器的测量值为θx,θy,则它们之间的关系为
(4)
将(3)式代入(4)式可得
(5)
因θy可同时由边缘传感器和倾斜传感器给出,故该矩阵具有线性相关特性,θy可用

(6)
(7)

(8)
3.2 实测控制矩阵
根据理论控制矩阵可知,单独运行位移促动器中的一个,由边缘传感器和数字相机激光倾角测量值可得到传递矩阵相应的列值。
单独运行位移促动器1号,位移促动器运行20步,每步理论值为5 nm,记录每一步运行后的测量值。图7为位移促动器1号实测拟合曲线与样机设计理论曲线。图7(a)拟合实测曲线的斜率为-1.562,(b)拟合实测曲线的斜率为-0.075,从边缘传感器P2和CCD可得剩余两个斜率为13.84和12.71,即构成传递矩阵的第1列。同理单独运行其他两个位移促动器,并拟合实测数据曲线,可得传递矩阵剩余两列的值,故由实测边缘传感器和数字相机激光倾斜测角可得位移促动器到传感器的传递矩阵为
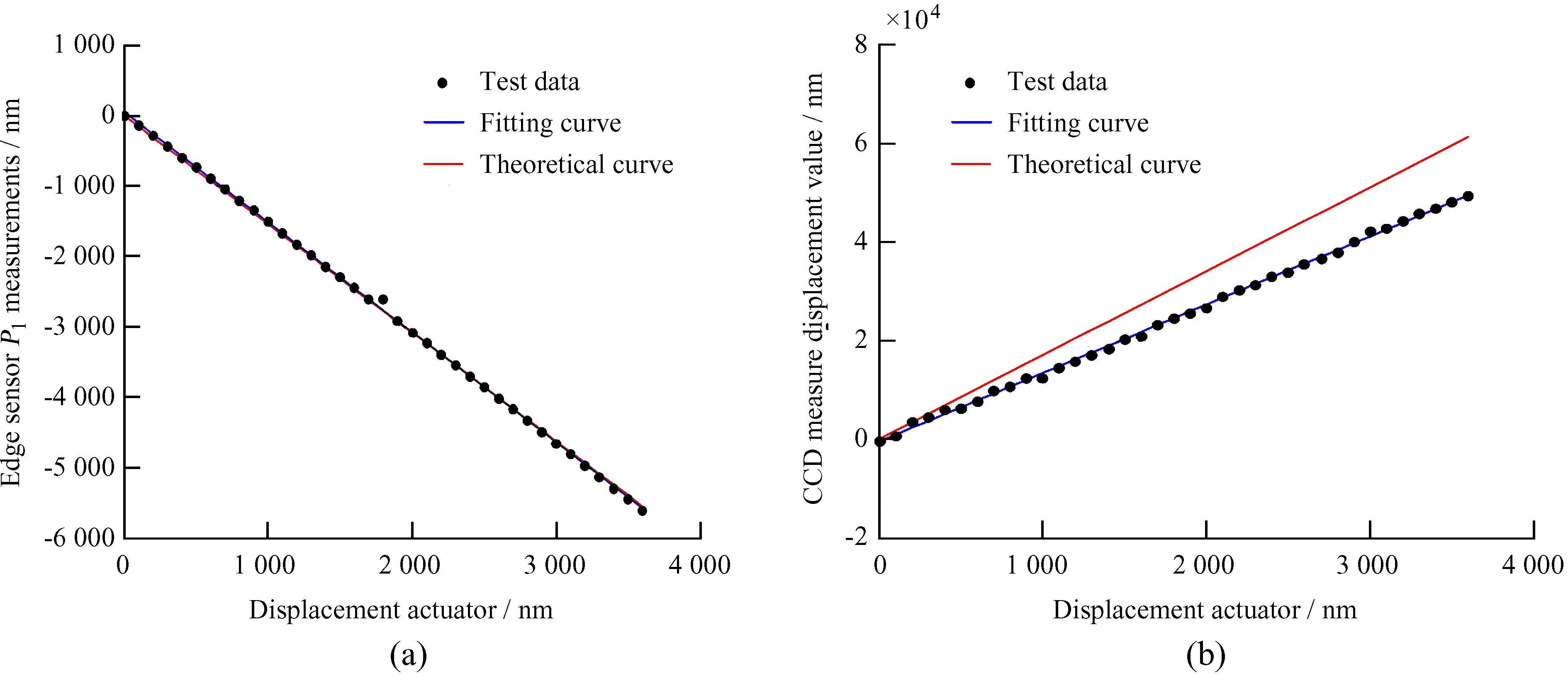
图7 位移促动器1号实测拟合曲线与理论曲线。(a)边缘传感器P1;(b)倾斜θx测量光斑位移量
(9)
将上述矩阵校正为3行3列的方阵并且求逆后可得实测控制矩阵为
(10)
理论控制矩阵和实测控制矩阵存在误差的原因为:(1)光学实验平台搭建过程中引入设备装调误差,即实际几何位置存在误差;(2)位移促动器运行过程中可能出现失步的现象。
4 主动校正实验与结果分析
4.1 理论控制矩阵校正实验
为验证理论控制矩阵的性能,设计实验步骤:在静态环境下使用理论控制矩阵作为校正矩阵,每隔5 s进行一次闭环主动校正,校正时长为25 min。图8(a)和(b)分别为静态环境下边缘传感器P1和P2随时间变化的曲线,图8(c)和(d)分别为静态环境下数字相机激光倾斜测量值随时间变化的曲线。

图8 理论控制矩阵主动校正。(a)边缘传感器P1;(b)边缘传感器P2;(c)倾斜θx测量值;(d)倾斜θy测量值
从实验结果可以看出,静态环境下未校正的边缘传感器P1和P2随时间变化呈发散趋势,但已校正的边缘传感器P1和P2随时间变化收敛于一定范围内;而对于数字相机激光倾斜θx校正效果相对不明显,θy校正效果明显。表1给出了边缘传感器P1,P2和数字相机激光倾斜θx,θy测角的均方根误差值。边缘传感器均方根误差不大于7.4 nm,数字相机激光倾斜测角均方根误差不大于0.080″,满足控制要求,说明控制系统是稳定的。

表1 理论控制矩阵主动校正统计特性Table 1 Statistical characteristics of active correction of theoretical control matrix
4.2 实测控制矩阵校正实验
为验证实测控制矩阵的性能,设计实验步骤:在静态环境下使用实测控制矩阵作为校正矩阵每隔5 s进行一次主动校正,校正时长为25 min。图9(a)和(b)分别为静态环境下边缘传感器P1和P2随时间变化的曲线,图9(c)和(d)分别为静态环境下数字相机激光倾斜测量值随时间变化的曲线。
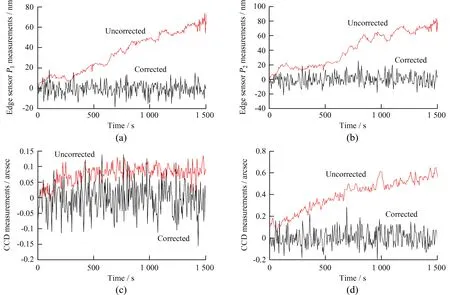
图9 实测控制矩阵主动校正。(a)边缘传感器P1;(b)边缘传感器P2;(c)倾斜θx测量值;(d)倾斜θy测量值
从实验结果可以看出,静态环境下未校正的边缘传感器P1和P2随时间变化呈发散趋势,但已校正的边缘传感器P1和P2随时间变化收敛于一定范围以内;而对于数字相机激光倾斜θx校正效果相对不明显,θy校正效果明显。由表2可以看出,边缘传感器均方根误差不大于7.3 nm,数字相机激光倾斜测角均方根误差不大于0.076″,满足控制要求,说明控制系统是稳定的。

表2 实测控制矩阵主动校正统计特性Table 2 Statistical characteristics of active correction of actual control matrix
5 结 论
本文针对巨型望远镜中环型拼接光学镜面子镜之间相对位置关系出现自由度探测不足的问题,提出了一种光学镜面位姿调整方法,通过搭建的两镜拼接实验系统计算出该系统的理论控制矩阵和实测控制矩阵,并在系统中利用控制矩阵对模拟的子镜位移进行了主动校正实验。实验结果表明,理论控制矩阵与实测控制矩阵均可对相邻子镜间的位移误差起到很好的主动校正作用。理论控制矩阵下,边缘传感器均方根误差不大于7.4 nm,数字相机激光倾斜测角均方根误差不大于0.080″;实测控制矩阵下,边缘传感器均方根误差不大于7.3 nm,数字相机激光倾斜测角均方根误差不大于0.076″,满足两镜拼接实验系统误差控制要求,为8 m环型太阳望远镜子镜位姿调整提供参考方案。