海底装备步履式支撑装置设计与分析*
2021-07-15王周洋刘德顺郭勇金永平邓斌
王周洋,刘德顺, ,郭勇,金永平*,邓斌
(1.湖南科技大学 海洋矿产资源探采装备与安全技术国家地方联合工程实验室,湖南 湘潭 411201;2.湖南科技大学 先进矿山装备教育部工程研究中心,湖南 湘潭 411201)
海底地壳成分与陆地基本一样,蕴藏着丰富的石油、天然气水合物、金属结核、富钴结壳等具有重大经济价值的矿产资源,尤其是深水和超深水区域的矿产资源占了海底资源总量的30%左右[1].对于深海热硫化物、富钴结壳等与海底岩石共生、赋存于海底岩石表面的矿产资源,大多情况下还是只能依靠钻探船和海底重型钻机进行钻探取样.海底钻机取样与钻探船取样相比,具有取样成功率更高、取样时间更短、取样成本更低和操作更方便等优点,是最近几年海洋探测和采掘装备发展的重点方向[2].受复杂海洋环境以及钻机支撑系统的影响,钻机的实际着陆点与给定的钻探位置会有一定的偏差,造成钻探点取样不准确,钻机在完成单点钻探取样后,需要通过绞车拖动钻机到合适高度后下放至其他钻探取样点,增加了钻探取样的作业时间,为了提高钻机的定点取样精度和钻探取样作业效率,开展海底装备自行式支撑装置研究具有重要意义.
到目前为止,国内外已经研发了各种不同结构形式、不同移动方式的海底自行式支撑装置,主要分为履带式支撑装置和足式支撑装置.海底履带式支撑装置主要是利用液压马达驱动履带进行移动,典型的有海底履带式集矿车[3]、四履带行走式海底挖掘机器人[4]、铰接履带式采矿机器人[5]等;海底足式支撑装置主要是利用液压缸驱动支腿进行移动,典型的有希腊的Hexa Terra海底六足机器人[6,7]和韩国的CR200海底机器人以及日本两栖六足机器人等,这些支撑装置为本文研究提供了参考.国外代表性的支撑装置有:20世纪90年代初德国锡根大学研制的采矿机器人[8],为保证在海底作业的性能要求,采用履带式支撑装置;1995年,美国提出一种采用8条三角形行走履带的海底采矿机器人方案,以适应海底复杂地形的要求,其空气中重11 t,最大行驶速度为0.4 m/s[9],主要适用于平整的多金属硫化物海底矿床;2013年韩国海洋科学技术中心研制的CR200样机进行了水下实验,前2条腿用于作业操作或行走,后4条腿仅用于行走,所有关节由电机驱动,水中重量为200 kg,最大行走速度0.5 m/s,承受的水流速度为2 kn[10].国内对履带式支撑装置的相关研究较多,2018年我国研制的富钴结壳采矿车“鲲龙2000”在大西洋进行了海试,其支撑系统采用四履带支撑结构[11],但国内对水下足式支撑装置的研究主要处于实验室阶段,并没有得到实际的应用,所以目前需要加快相关技术的研究.
为了更有效地实现海洋环境探索,满足海底装备在非连续性地面支撑和行走的要求,本文设计了一种海底装备步履式支撑装置,能在海底复杂环境下移动,可搭载小型的海底钻机、机械手之类的海底探测装备,并为其提供稳定快速的支撑平衡系统.与传统的钻机支撑装置相比,该装置定点取样精度高、支撑稳定性好、自动化程度高、模块性强、体积小、适应性强.
1 步履式支撑装置总体方案研究
1.1 步履式支撑装置方案设计
通过参考传统海底钻机支撑装置的工作原理,采用可重构的设计思路,在原有支撑系统上再增加一个辅助支撑系统,以满足交替行走的要求;同时,设计了一种回转、平移机构,用于驱动步履式支撑装置上下平台的轴向旋转以及直线移动.
1.2 步履式支撑装置工作过程逻辑分析
为了保证工作效率和装置的安全,需要制定一套完整的行走逻辑过程.装置的工作过程主要包括水下的探测、平移、转向和调平等,如图1所示.
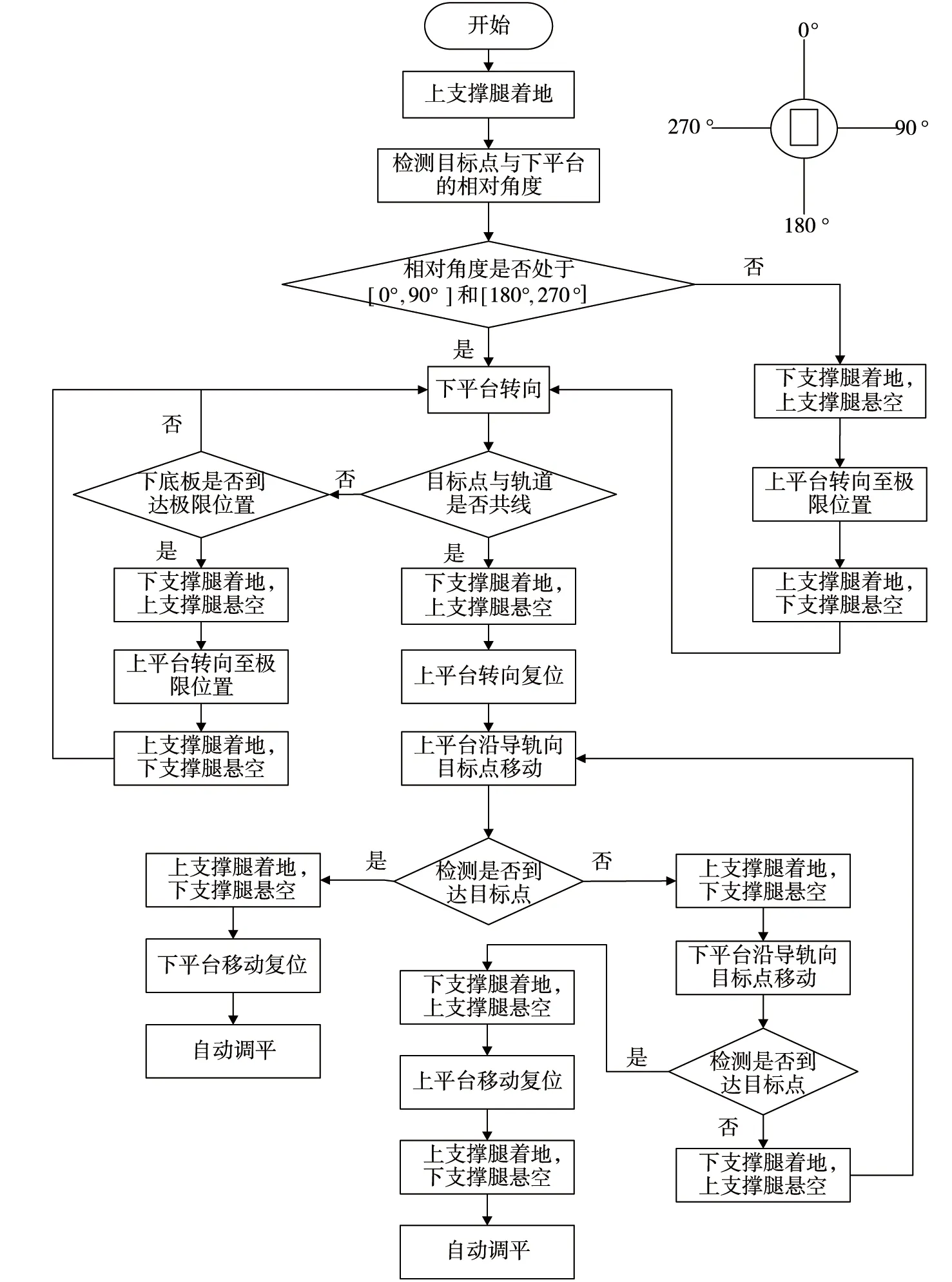
图1 步履式支撑装置工作过程逻辑
母船航行至预定海域后,调整到预定航速,开始布放海底装备,步履式支撑装置实时反馈深度和姿态信息,根据这一信息控制液压系统使上平台支撑腿打开,使海底装备着地后达到稳定状态.
步履式支撑装置转向操作的具体步骤:步履式支撑装置达到稳定状态后,位置跟踪传感器开始检测目标点与导向架的相对角度,当相对角度处于[0°,90°]和[180°,270°]时,液压马达驱动下平台转动到与检测目标点共线后,下平台支撑腿着地,上平台支撑腿在支腿油缸的驱动下开始悬空,液压马达驱动上平台转动复位.当相对角度处于[90°,180°]和[270°,360°]时,下平台支撑腿着地,上平台支撑腿在支腿油缸的驱动下开始悬空,液压马达驱动上平台转动到与检测目标点共线后,上平台支撑腿着地,下平台支撑腿在支腿油缸的驱动下开始悬空,液压马达驱动下平台转动复位.
步履式支撑装置移动操作的具体步骤:上下平台转动到指定位置后,平移油缸驱动下平台向目标点方向移动到指定位置,下平台支撑腿着地,上平台支撑腿在支腿油缸的驱动下开始悬空,平移油缸驱动上平台向目标点方向移动,上下平台在平移油缸的驱动下交替移动,直到步履式支撑装置达到目标点后停止.
步履式支撑装置调平操作的具体步骤:当下平台支撑腿着地后,上平台的支撑腿悬空时,下平台支腿油缸驱动支撑腿对机身姿态进行精确调平;当上平台支撑腿着地后,下平台的支撑腿悬空时,上平台支腿油缸驱动支撑腿对机身姿态进行精确调平.
2 步履式支撑装置设计
步履式支撑装置主要由上平台支撑系统、上机架、动力及控制系统、下平台支撑系统、平移机构、下机架和转向机构组成,如图2所示.步履式支撑装置支腿伸展时整机体积(长×宽×高)3.7 m×3.2 m×0.8 m,支腿收缩时整机体积(长×宽×高)2.1 m×2.1 m×1.8 m,空中重量1 000 kg等.
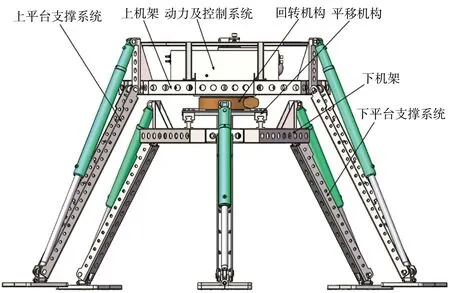
图2 步履式支撑装置结构组成
2.1 步履式支撑装置支撑系统设计
步履式支撑装置的支撑系统分为2部分:上平台支撑系统和下平台支撑系统,下平台支撑系统结构如图3所示,采用3腿支撑,由下平台、液压缸、腿支架以及支腿脚板4部分组成,3条支腿铰接点均布在下平台内接圆上.液压缸缸筒与上平台铰接,缸杆通过虎克铰与支腿脚板相连;腿支架一端与上平台铰接,另一端通过销轴与缸杆相连;支腿脚板通过虎克铰与液压缸及腿支架相连.步履式支撑装置的上平台支撑系统构件总数为11个,运动副总数为12个,其中包括6个转动副,3个移动副,3个万向副.由机械结构自由度计算公式(Kutzbach-Grubler公式)可知:
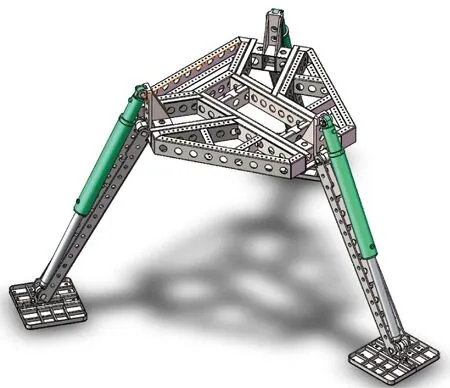
图3 下平台支撑系统结构
(1)
式中:n为构件数;g为所有构件之间的运动副数;fi为第i个运动副的相对自由度数.
2.2 步履式支撑装置转向、平移机构设计
转向、平移机构如图4所示,由回转支撑、滑动平台、液压马达和液压油缸等4部分组成,回转支撑一端与上平台连接,另一端通过滑动平台与下平台连接,实现上下平台的相对转动.平移机构采用液压缸-连接板-回转支撑安装板的驱动方式,这种方式精度高,摩擦系数小,且能够提供较大的驱动力,使得机构在大的偏载载荷下能够有效运转.
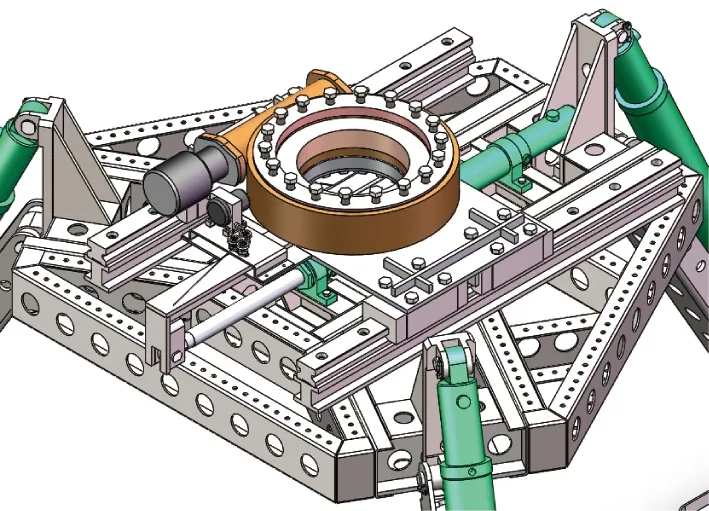
图4 转向平移机构
2.3 步履式支撑装置液压系统设计
液压系统因具有功率密度大、体积小、重量轻、动作灵敏等优点而广泛应用于深海装备中.步履式支撑装置液压系统采用模块化设计思想,由4个模块单元和各功能回路构成;动力单元为液压系统提供动力;补偿单元为液压系统提供压力及体积补偿;所有电磁阀集成在阀箱中,并充入液压油和补偿器连接进行压力补偿;管路集成单元将系统中的管路及接头集中在一起,使管线排布更加合理;各功能回路主要由支撑回路、回转回路和平移回路组成,分别实现装置位置调整、回转、移动等功能,其液压原理如图5所示.
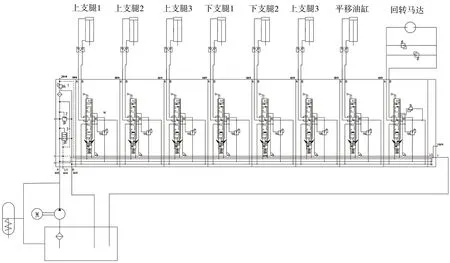
图5 步履式支撑装置液压系统原理
1)液压泵站 安装在步履式支撑装置上平台位置,主要由定量泵、浸油电机、压力补偿器、过滤器和油箱组成,其中,压力补偿器的结构形式为皮囊式,即通过弹性元件将外界海水环境压力传递到补偿器内部油液中,使整个液压系统的压力都是建立在环境压力之上,消除了环境压力对液压系统的影响.定量泵采用抗污染能力强、故障率低的齿轮泵.
2)PSL比例多路阀 主要由连接块、换向块和终极块组成,由于系统工作时每条液压缸所承受的负载、油缸的伸长变化量都不一样,为了能够与其变化的负载无关地控制执行元件的流量,使用PSL型负载敏感式比例多路换向阀,使流量在工作期间与变化的负载持续地匹配,达到系统的控制要求.
3)液压马达 驱动上下平台的交替转动,实现步履式支撑装置转向的要求.
4)平移油缸 驱动上下平台的交替移动,实现步履式支撑装置移动的要求.
5)支撑油缸 除了具有支撑步履式支撑装置机体的功能外,还能通过油缸驱动支腿的升降控制装置的倾斜角度.
3 步履式支撑装置稳定性分析
3.1 步履式支撑装置支撑系统力学分析
步履式支撑装置下放至海底后,由于海底地层的坡度和地层的松软程度不一,都会导致支撑平台的倾斜,因此步履式支撑装置在工作前应进行姿态调整,确定其初始运动的姿态.由于步履式座底支撑装置在移动过程中速度较低,所以将海水阻力和惯性阻力等忽略不计,且假设步履式支撑装置的移动速度是均匀的,对步履式支撑装置斜坡移动状态进行静力学分析,其受力简图如图6所示.
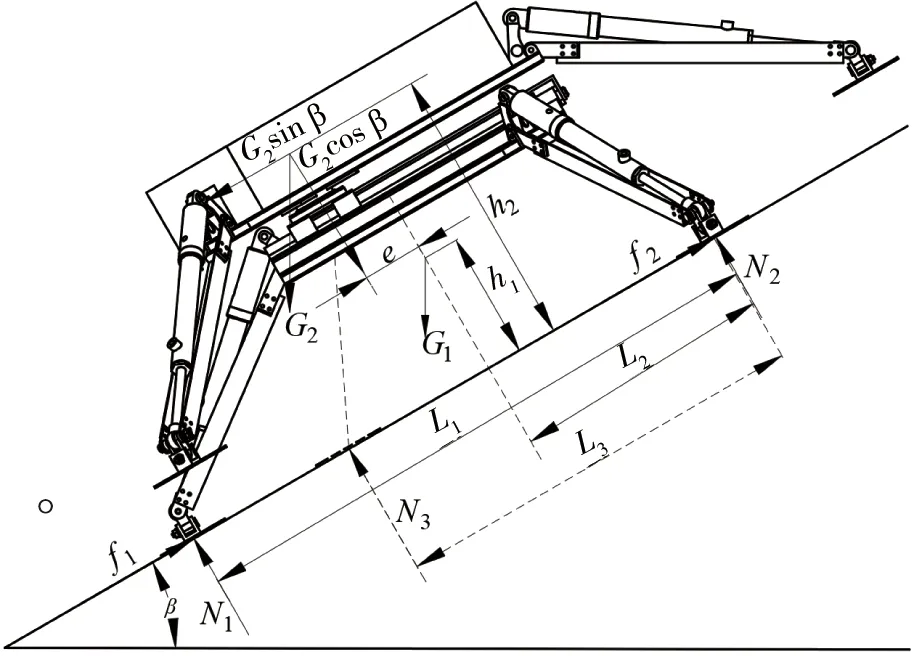
图6 步履式支撑装置斜坡纵向移动
图7为步履式支撑装置单支撑腿结构受力图,其中AB表示支腿座,AC表示支腿架,BC表示支腿液压缸,A为转轴,由力学平衡条件可得
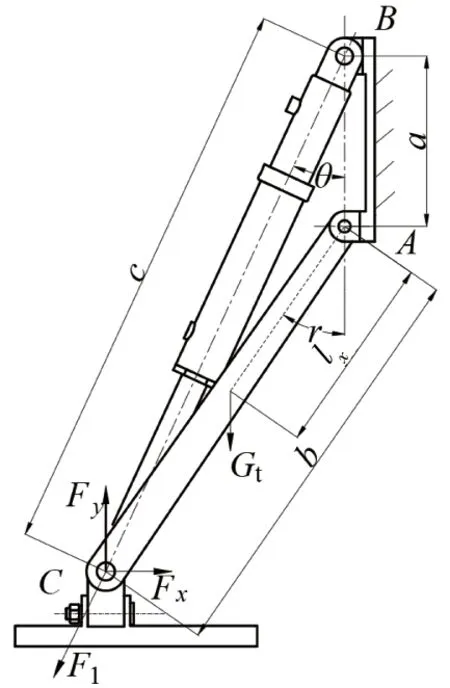
图7 单支撑腿结构受力
(G1+G2)sinβ=f1+f2+f3;
(2)
(G1+G2)cosβ=N1+N2+N3;
(3)
[G1h1+G2(h1+h2)]sinβ+[G1L2+G2(L2+e)]cosβ=N1L1;
(4)
Fx(bcosθ-a)-Fybsinθ+Gtlxsinr+F1asinθ=0;
(5)
(6)
式中:G1为下平台整体在水中重量;G2为上平台及负载在水中重量;Gt为单支撑腿的重量;β为斜坡角度;f1,f2,f3分别为单支腿底板与海底土壤的摩擦力;h1为下平台重心距斜坡高度;h2为上平台重心与下平台重心的距离;e为滑动平台移动距离;θ为油缸与支腿座之间的夹角;r为支腿架与底座之间的夹角;lx为单支撑腿重心距A点的距离;u为滑轨摩擦系数;L1为下支撑腿1与下支撑腿2在竖直方向上的距离;L2为下支撑腿2与下平台重心点在竖直方向上的距离.
由平衡方程可以得出:当步履式支撑装置支腿3移动到图6所示的位置时(下支撑腿2与下支撑腿3在竖直方向上的投影重合L3=0),下支撑腿1所受到的支持力N1达到最大值;其中下支撑腿1所受到的支持力N1、液压缸载荷F1与倾斜角度β的关系曲线分别如图8和9所示.
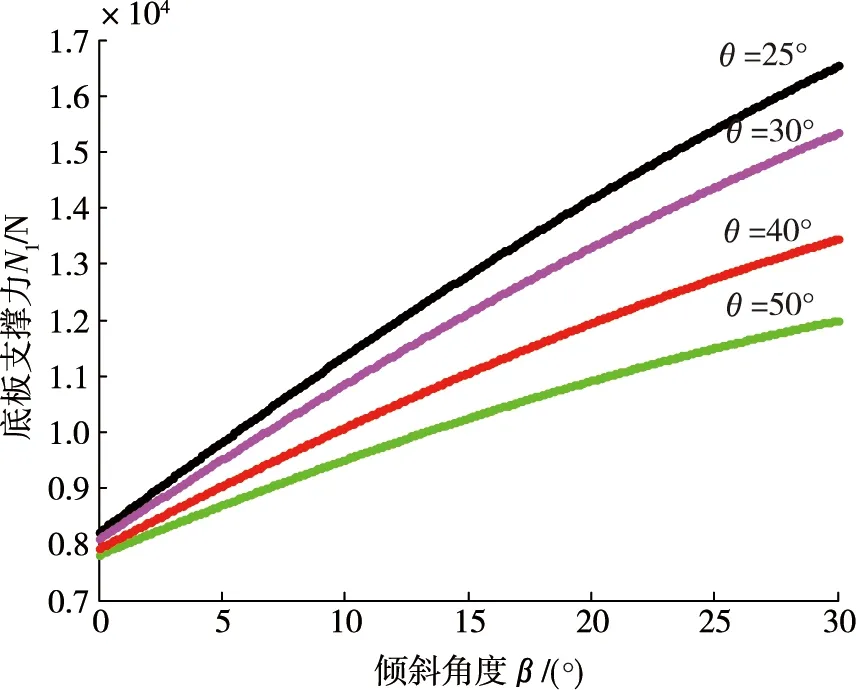
图8 N1和β的关系曲线
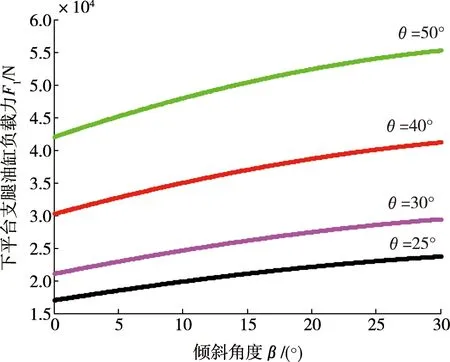
图9 F1和β的关系曲线
由以上结果可知:(1)当步履式支撑装置可以在海底纵向斜坡上正常移动,无滑移现象发生时,随着海底斜坡坡度的增大,下支撑腿1所受到的支持力N1、液压缸载荷F1都增大;(2)随着油缸与支腿座之间的夹角θ增大,下支撑腿1所受到的支持力N1减小,液压缸载荷F1增大.
3.2 步履式支撑装置移动稳定性分析
当步履式座底支撑装置在倾斜角度较大的海底移动时,容易发生沿斜坡横向滑移或倾覆.由于步履式支撑装置在移动过程中速度较低,所以将海水阻力和惯性阻力等忽略不计,且假设步履式座底支撑装置的移动速度是均匀的,根据海底沉积物力学特性对步履式座底支撑装置进行分析.
如图10所示,当步履式支撑装置在海底斜坡上移动发生侧翻时,距离水平面较高的支腿支撑板作用力N2为0,装置绕支腿支撑板1和支腿支撑板3与地面接触点旋转产生倾覆,根据受力平衡得

图10 步履式支撑装置斜坡横向移动示意图
N2L1+(G1h1+G2h2)sinβ+N3L2=[G1L2+G2(L2-e)]cosβ.
(7)
由平衡方程可以得出:当海底斜坡坡度小于倾覆极限角度时,步履式支撑装置可以在海底斜坡上移动,无侧翻现象.由式(7)可知:若步履式支撑装置上平台的重心距离地面的高度h2越小,支腿支撑板1与支腿支撑板3之间的水平距离L2越小,上平台重心距离水平面较低的支腿支撑板1的距离L2±e越大,则步履式支撑装置的移动稳定性越好.
步履式支撑装置在坡道上还可能产生滑移现象,其平衡方程为
Gsinβ=Ac+Wtanφ.
(8)
式中:G为步履式支撑装置整体重量;W为步履式支撑装置支撑腿正向压力;φ为对应的土壤内摩擦角系数.由步履式支撑装置发生横向倾覆、滑移的平衡方程可以得出: 当海底坡度小于滑移极限角度时,步履式座底支撑装置可以在海底纵向斜坡上正常移动,无滑移现象发生,而滑移极限角度只和步履式座底支撑装置的支撑板侧板面积A和底质土剪切强度c有关.
根据步履式支撑装置性能要求,计算得出纵向行驶和横向行驶的理论倾翻角,如表1所示.

表1 步履式支撑装置稳定性评价指标
表1得出的步履式支撑装置稳定性指标满足设计指标及性能要求,横向移动极限翻倾角、滑移角和纵向极限翻倾角、滑移角的值大于其设计的最大越障坡度值.极限翻倾角和滑移角相比,无论在纵向坡道还是在横向坡道上,步履式支撑装置都先发生滑移现象.
4 结论
在调研目前国内外有关海底装备支撑装置的有关资料后,为了提高钻机的定点取样精度和钻探取样作业效率,创新性地设计了一种海底装备步履式支撑装置,能在海底复杂环境下的移动,可搭载小型的海底钻机、机械手之类的海底探测装备,并为其提供稳定快速的支撑平衡系统.对步履式支撑装置进行了斜坡移动静力学分析,并计算了装置支撑过程中支撑腿液压缸的受力和支腿支撑板作用力与斜坡倾斜角度之间的关系,为液压系统的计算选型及关键零件的校核提供了依据.
