测控设备自跟踪状态稳定性分析及对策
2021-07-14许江来
许江来,韩 磊
(中国人民解放军32039部队,北京 102308)
0 引言
随着航天事业的蓬勃发展,通信卫星在国民经济建设发展中发挥了重要作用。卫星测控是航天系统任务的重要组成部分,是保证通信卫星正常运转的重要手段,卫星地面站测控设备天线能够时刻对准测控目标是实施卫星测控任务的一个首要前提条件[1]。在测控设备中,跟踪接收机的自跟踪交叉耦合系数是描述刻画跟踪天线对准测控目标的一个重要技术指标[2]。在卫星测控实践中发现,自跟踪交叉耦合系数是随着和差信道相位、环境温度变化而变化的,一旦这个不稳定性超出预期,交叉耦合系数不满足设备最低的跟踪指标要求后,测控天线无法完成对目标的自动跟踪。例如,在某型号卫星地面站安装测试中,Ka频段测控设备自跟踪交叉耦合系数调整后,自跟踪状态正常,但保持的周期较短。重新调整交叉耦合系数后,自跟踪状态又能满足要求。但过了一段时间周期后,自跟踪状态又变差,导致测控天线无法对准目标,无法开展卫星测控任务。这是因为自跟踪状态稳定性变差引起的,变差后导致交叉耦合系数不能保持在指标要求的范围内,导致测控天线无法对准目标[3]。
国内外早期的做法是,在实施测控任务前,先调整好跟踪接收机的交叉耦合系数指标,使其小于一定要求后(例如1/10),再开展测控任务。但是如果能找到一种方法,改善跟踪接收机自跟踪状态稳定性,使得交叉耦合系数在较长的时间下能够保持在技术指标要求的范围内,这样就不必经常反复调整检查交叉耦合系数,能够更好地完成测控任务[4]。
通过对自跟踪状态稳定性进行分析,当和差通道相位差变化时,交叉耦合系数也会产生变化,相位差变化与自跟踪状态稳定性是正相关的,通过使用采集的工程实验数据,验证了环境温度变化、传输链路变化对相位差变化的影响。
1 自跟踪状态稳定性分析
自跟踪状态稳定性是提高双通道接收机捕获性能的首要条件,当跟踪天线对准目标后,接收机载波环路以一定的扫描速率进行扫描,采用预检测通道的双通道捕获方法实现接收机环路锁定[1]。因此,只有跟踪天线对准目标后,接收机接收的和模信号幅度才能达到最强的信噪比,可以减少扫描时间,使载波环路锁定,提高接收机的捕获性能。在双通道跟踪接收机中,和模信号用来实现载波锁定,差模信号用来析出方位、俯仰误差信号,驱动天线向减小误差的位置移动,保证跟踪天线时刻对准目标,实现系统的自动跟踪。接收机载波锁定之后,本地VCO经过移相器,产生差路鉴相器的参考信号,通过鉴相,就可以单独提取方位俯仰误差电压[5]。一种典型的差模信号提取方位俯仰信号示意图如图1所示。

图1 差模信号提取方位俯仰信号示意
差模信号经分路器分别送入方位和俯仰鉴相器,与VCO产生的参考信号鉴相出误差电压,低通滤波器的作用是滤出高频分量,极性开关调整误差电压的正负极性[6-7]。当天线偏开电轴零点时,就会产生差模信号,差模信号与方位鉴相参考信号、俯仰鉴相参考信号在各自的鉴相器进行鉴相后,再经各自的低通滤波器输出方位、俯仰误差电压,方位、俯仰误差电压被放大后,驱动跟踪天线向减少跟踪误差的方向运动,使测控设备始终保持自跟踪状态[8]。
当方位正向拉偏时,按理应该只产生正方位误差电压,俯仰误差电压为零[9],但是事实上,由于电路器件本身的原因,方位、俯仰2个支路不可能做到真正的正交,因此,俯仰误差电压不可能为零,工程应用采用交叉耦合系数刻画二者的相互影响,定义为:
自跟踪校相的过程就是在方位、俯仰信号垂直正交的条件下,调整可得到方位、俯仰移相器移相值,使得θ=φ[10]。为了满足某型号卫星地面站测控设备自跟踪的要求,需要对设备进行自跟踪状态校相,而所谓的自跟踪校相,就是对和差相位、正交鉴相进行调整,使交叉耦合系数q满足指标要求(<1/7)。
从自跟踪校相的过程看,自跟踪状态是一个动态的稳定过程,要保持该状态稳定,首先是要和差相位的变化的差尽量小,即和差相位的稳定性会直接影响到自跟踪的稳定性。
假设和差相位值差由φ变为φ+Δφ,则自跟踪状态的交叉耦合系数变为:
当相位差Δφ变化时,如何影响交叉耦合系数[11],如图2所示。
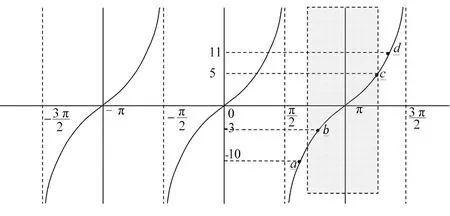
图2 相位差变化对交叉耦合系数影响示意
当第一次建立的自跟踪状态的交叉耦合系数是1/10,假定φ-θ>0,通过极性开关取方位、俯仰误差电压绝对值,则:
对应的自跟踪稳定点是图2中a点位置,此时q=1/10,显然满足交叉耦合系数指标要求。
而当和差相位差变化为φ+Δφ时,则:
对应的自跟踪稳定点是图2中b点位置,此时q=1/3,显然不满足交叉耦合系数指标要求,在这种条件下,自跟踪状态将变差。

对应的自跟踪稳定点是图2中c点位置,此时q=1/5,仍然不满足交叉耦合系数指标要求,自跟踪状态继续变差。

对应的自跟踪稳定点是图2中d点位置,此时q=1/11,又满足了交叉耦合系数指标要求,自跟踪状态将向稳定方向发展。
因此,当和差相位差变化时,将引起交叉耦合系数产生变化,使原先通过自跟踪校相建立的自跟踪状态变得不稳定,甚至导致不能进行自跟踪,图2中阴影区域为自跟踪交叉耦合不稳定的区域。只有保证和差相位差Δφ变化较小,才能保证交叉耦合系数不受影响,从而保证自跟踪系统的稳定性[3]。
2 和差相位测试实验
在测控设备安装验收的工程实践中发现,温度变化、和差传输电缆长度变化这2个因素对和差相位差变化影响较大,进而对自跟踪稳定性产生重要的影响,为了分析Ka频段和差通道相位稳定性,选择固定的传输电缆长度,进行温度实验,然后再选择不同的传输电缆长度,进行温度实验。
在固定的传输电缆长度下进行无线测试的结果如图3所示,考察了温度变化状态下的和差相位变化情况,图中纵坐标轴将相位差量化单位弧度(rad)和中心体温度量化单位(℃)进行了归一化折算,以便使用相同的坐标刻度,图中横坐标时刻表示时间,量化单位是时分(hh:mm)。可以看出,中心体温度由8 ℃变化到30 ℃时,和差通道相位差在-108~18 rad变化。
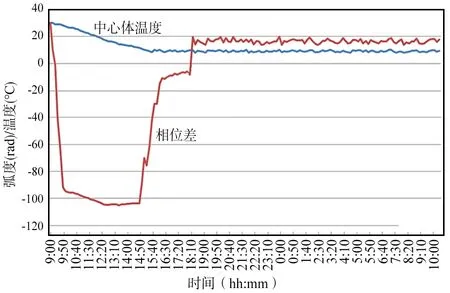
图3 中心体温度与和差通道相位差的关系实测曲线
图4示意了用矢量分析仪测量1 m长度射频(RF)电缆的相位与温度变化规律[11],图中纵坐标轴表示相位差值弧度(rad),横坐标表示温度(℃)。

图4 1 m射频电缆相位随温度变化曲线
从图4可以看出,电缆在平稳降温过程的相位变化曲线是连续变化的,从16~27 ℃这仅仅11 ℃的温度范围内,1根1 m长的电缆的相位变化已经达到58 rad。
由以上实验数据验证可以得出,环境温度、传输电缆长度变化会引起和差信道相位变化,因此,考虑到在某型号卫星地面站安装测试中出现的自跟踪状态稳定性变差的问题,提出了采用温度相位补偿与传输电缆长度相位补偿的方法,减小Ka频段和差信道相位的相对变化量。由于一本振混频以下的链路受温度变化影响较小,所以仅对单一频率采取混合补偿的方法(即温度和传输链路相结合的相位补偿的方法)进行实验。实验过程如下:通过采用调节高频房环境温度(16~30 ℃)以及和差通道传输电缆长度(保持和差信道电缆相对长度差1 m),对和差相位变化进行补偿,在有线和无线状态下分别进行测试,记录和差相位与温度间的变化情况[11]。有线状态和无线状态下,混合补偿后和差相位与温度变化的测试结果如图5所示,图中纵坐标轴表示相位差值弧度(rad),横坐标表示温度(℃)。从图5(a)可以看出,当高频房环境温度在16~30 ℃变化时,有线状态下,和差相位变化量3~6 rad,实测的自跟踪交叉耦合系数均小于1/10。从图5(b)可以看出,当高频房环境温度在16~30 ℃变化时,无线状态下,和差相位变化1.5~9 rad,实测的自跟踪交叉耦合系数均小于1/7。实际工程实践表明,只要交叉耦合系数均小于1/7,自跟踪状态无需调整。

(a) 有线状态
3 措施与对策
工程实践表明,信道设备环境温度、传输线长度这2个环节要素与测控设备和差信道相位变化紧密相关,它们对和差信道相位差值影响较大,在使用Ka频段的测控设备中显得尤为突出,这是因为频率越高,信道设备受环境温度变化的影响越大[12];另外,由于Ka频段的跟踪天线波束非常窄,方位俯仰的偏离范围越小,自跟踪状态的稳定性要求越高,对相位变化更敏感[13]。因此,从测控设备安装部署开始时就要采取如下的应对措施。
① 测控设备安装部署后,跟踪天线接收空间信号在天伺馈下行旋转关节后分为和差2路信号通道,由于波导架设等原因,和差通道到达跟踪接收机时的等效电长度是有差别的[14],这个电长度差等效于前文分析中的相位值,它的取值与自跟踪交叉耦合系数有关,如果等效电长度不匹配的话,交叉耦合系数无法满足技术要求。可采用高频段稳相电缆,对和通道电缆适度加长或缩短,补偿和差通道相位差变化,最终使和差通道相位差满足交叉耦合系数的稳定要求。具体增加的电缆长度20 cm~1 m进行选择,每10 cm为一步进测试区间,找到合适的交叉耦合系数对应的相位差后,固化和通道电缆设备状态。
② 信道设备环境温度的变化对和差信道相位影响巨大,特别是Ka等较高的频段。由以上试验数据可知,保持中心体和高频间的温度一致是十分重要的,和路场放(LNA)和变频器安装在环境恶劣的天线支套内,而差路场放(LNA)和变频器安装在中心体内,温度变化会引起和差通道相位稳定性的变化。可以采取在天线支套中间加装保温隔离墙措施,同时在支套内壁加装保温材料,并在中心体与高频房之间安装轴流风机,以加强中心体与高频房之间的空气交换,从而达到热平衡,使和差2路场放都工作在温度比较合适的温度环境中,保持和差通道相位差的稳定性。
③ 完善高频房、设备机房的环境温度的监测与控制,与设备监控一体化设计故障报警处置,在温度出现变化时,及时启动备用空调及散热设施,减小温度变化引起的和差相位变化,保证自跟踪状态的稳定性。
④ 按照工程实践,只要更换测控链路设备或改变传输链路,都会引起和差相位的变化。因此,维护、维修、更新设备时,应重新调整和差通道至跟踪接收机的等效电长度,匹配自跟踪交叉耦合系数要求,防止稳定点移除到自跟踪可控范围,导致卫星测控任务失效。
4 结束语
由自跟踪状态稳定性分析可以看出和差信道的相位差变化引起自跟踪交叉耦合系数的变化,使得自跟踪状态稳定性产生变化,它们之间是正相关的。在和差相位测试实验中,可以看出温度变化、和差传输电缆长度变化这2个因素对和差相位差变化影响较大,进而对自跟踪稳定性产生重要的影响。试验验证了采用调节高频房环境温度以及和差通道传输电缆长度的混合补偿方法可以保证和差信道的相位差变化在一定的范围内,自跟踪交叉耦合系数可以控制在1/7以内,大大提高自跟踪状态的稳定性。在Ka频段下,由于星地天线波束窄,卫星地面站测控设备对自跟踪状态的稳定性要求更高,更需要采取相应的应对措施保证温度变化和传输链路长度变化始终在自跟踪系统可控范围内,最大限度地保证设备自跟踪状态的稳定性,提高执行测控任务的效能。
