适用于无源网络的模块化多电平柔性直流启动控制研究
2021-07-14周东游郝正航唐文博
周东游,郝正航,唐文博,刘 涵
(贵州大学电气工程学院,贵州 贵阳 550000)
0 引言
模块化多电平换流器(MMC)是近年来国内外众多学者和工程人员研究的热点。国外专家目前研究热点主要集中在电容电压均衡策略以及换流器桥臂的二陪频换流抑制上,对于向无源网络供电的研究较少。本文主要依据MMC在海岛输电,城市和孤岛供电及大范围分布式DG接入的优点进行研究。由于MMC的拓扑结构的改变,常规的两电平VSC的控制也不能完全适用。文献[1-2]对MMC的运行以及发展前景作出了明确的介绍。文献[3]提出了坐标变换和dq解耦的控制办法。文献[4]提出了一种桥臂能量均分控制和电容电压稳压控制。文献[5]提出了一种电网电压不平衡时的MMC无差拍直接功率控制,其优点是省略了电流内环控制,从而规避了多个PI的调节,使控制速度大幅上升。但是应用范围收到了限制,仅在电网电压不平衡时具有较好的效果。文献[6]提出了一种基于传感器的控制策略,但是增加了系统的投资和对测量元件的依赖。文献[7]提出了一种通过逐步递减投入子模块个数的直流侧主动充电策略,该方法实现了无缘端换流阀从不控预充电到解锁投入正常运行的平滑过渡,但是子模块频繁的投入和切除又增加了器件的损耗。文献[8]从换流器桥臂功率脉动与能量脉动角度,结合子模块电压纹波系数,对其子模块电容参数进行合理设计。文献[9]提出了基于电压斜率控制的充电策略以避免产生换流器输出过流,但是带斜率控制的定电圧既能够使换流器解锁时产生较小的冲击电流,同时也能在抬升直流电压时起到减小电压波动的作用。文献[10]设计了一种通过环流抑制的方法来解决电容电压波动的问题,但是控制策略较为复杂。文献[11]提出了一种基于MMC内部换流的二次分量来抑制电容电压波动,从而引入了PR(准比例谐振控制),但是其根本的数学模型仅是基于上下桥臂子模块的,不具备系统性。文献[12]提出一种基于负向电流支路部分子模块切除的可控充电策略,但是主要用于全桥子模块和半桥子模块混合的电路中,并且启动速度不佳。
1 换流站自励启动的原理
启动初期IGBT缺乏必须的能量而无法触发,处于闭锁状态。其一个桥臂的电气特性和该桥臂中任意一个子模块的电气特性一致,对于闭锁状态下的任意子模块,定义其电压usm和电流ism的正方向由A到B,闭锁状态下的等效电路与其电流方向密切相关,当电流为正时,子模块处于充电阶段,当电流为负时,子模块处于旁路状态对外等效为短路,如图1所示。

图1 子模块闭锁时等效图
先以直流侧开路的MMC做简要的分析[13-14],三相上桥臂依次编号为1,3,5,三相下桥臂依次编号为4,6,2。如图2所示。
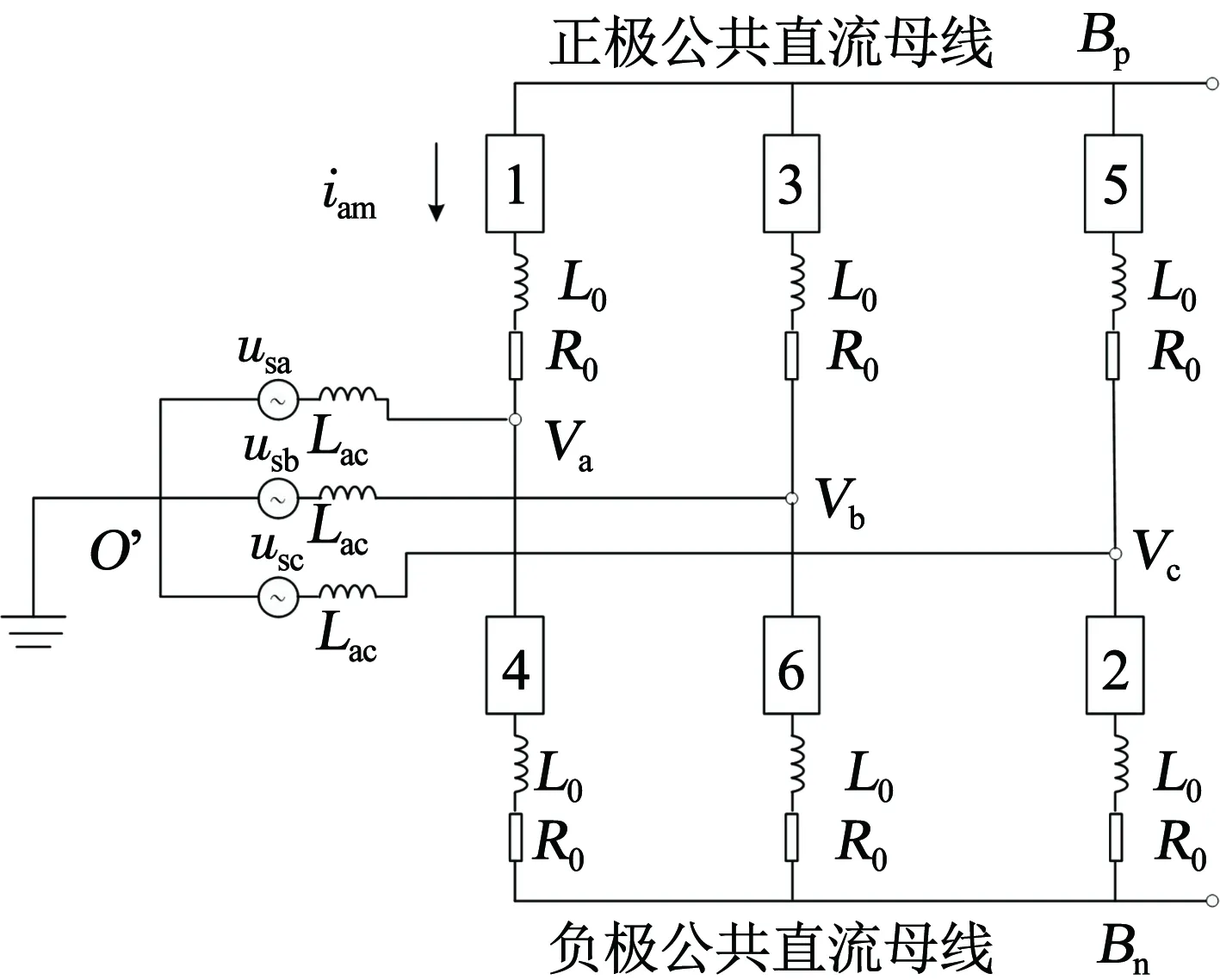
图2 直流侧开路的MMC等效图
并且定义电流正方向是从上到下。仍然采用传统的直流输电换流理论对线电压过零点的定义对直流开路侧MMC做简要的分析,即usa超过usc的相交点为C1,usb超过usc的相交点为C2,如图3所示。

图3 直流侧开路的MMC线电压波形图
实际上对于桥臂5充电的时间是从C1到C5的时间段。只要Epc在任意时刻大于upc桥臂5就会充电,其电容电压将会进一步上升,可以推断,随着充电时间的增加,桥臂5上的电压会越来越大,直到Epc在任意时刻都不大于upc时充电结束,桥臂5上的电压必将等于Epc的最大值,即交流线电压的幅值,根据数学公式的推导不可控充电阶段的充电率可以达到71%,到器充电的充电率大概为35%到37%[15-16]。
2 产生冲击电流的数学机理
目前系统预充电常采用抬升直流电压到额定值后再解锁从站,根据如下的数学推导发现依旧会产生冲击电流[17],具体如下:电流不控充电的等效电路图如图4所示,电流不控充电时系统交流电压加在直流正负极之间,当不控充电结束时,桥臂电压几乎等于阀侧交流电压的峰值,桥臂充电电流为0,所以
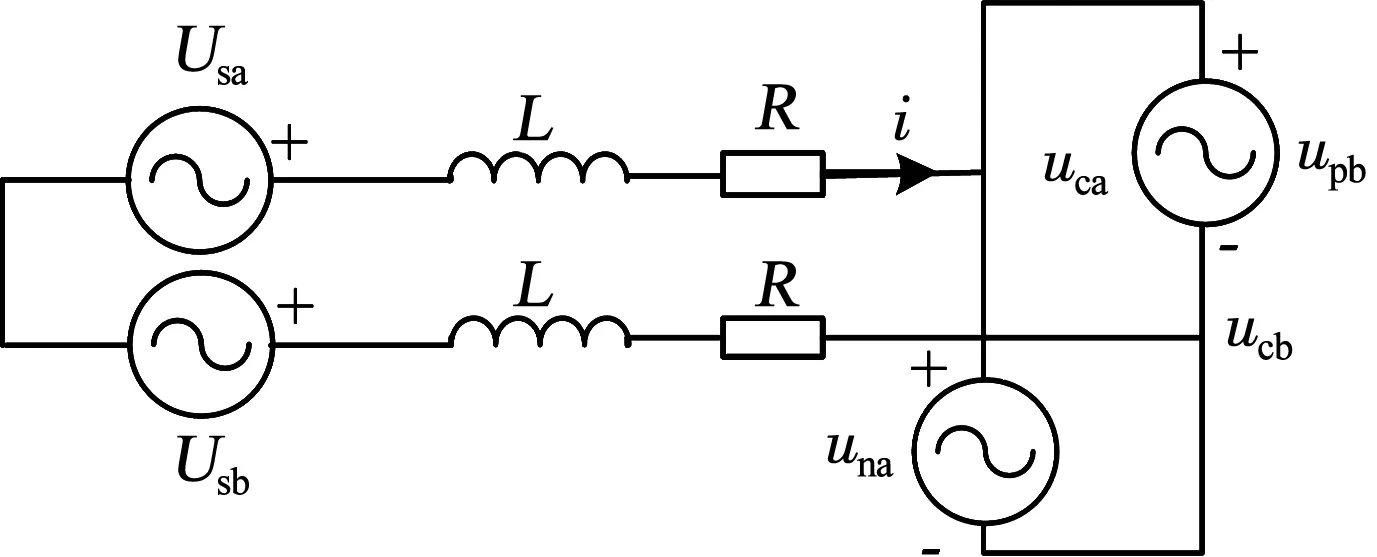
图4 电流不控充电的等效图

(1)
式中Usa,Usb——交流线路的其中两相的电压;
Uca,Ucb——桥臂的电压,当不控充电结束时,有交流线电压峰值等于桥臂电压即:Usj=Ucj(j取a,b,c)主站解锁后,上下桥臂按正常调制规律导通,投入子模块个数按电压调制比生成可得[18]
(2)

Usm——充电过程中各个子模块电容电压实时值;
n——单个桥臂总模块数;

图5 MMC-HVDC系统直流等效图
由图5可得
(3)
在不考虑冗余保护下,主换流站解锁瞬间有:Udc=Upj+Unj,Upj为上桥臂电压,Upj为下桥臂电压,又MMC电流平均分配原则可得主站上下桥臂的电流为[19]
(4)
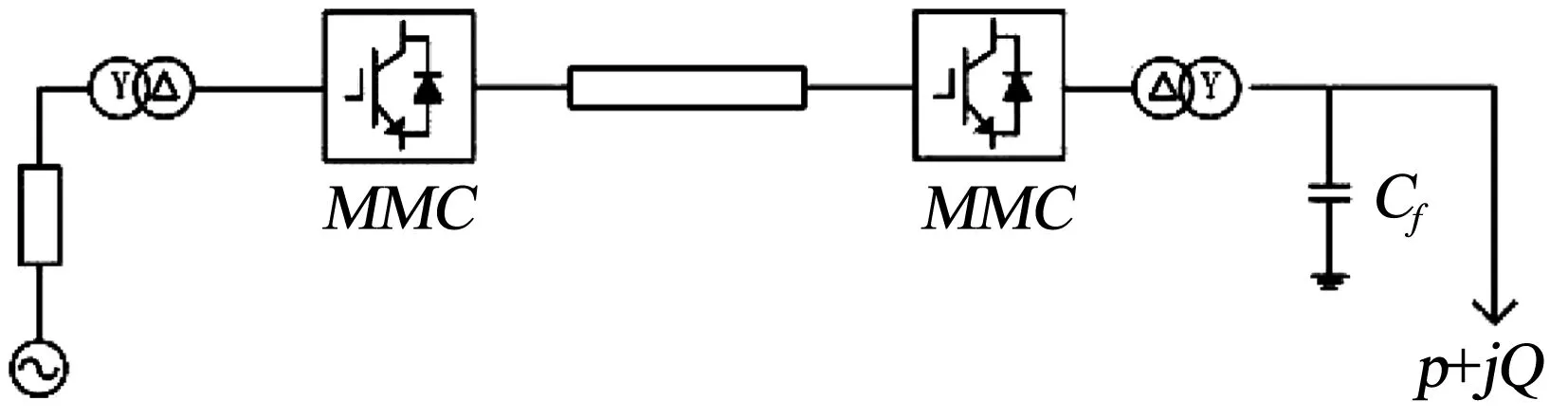
若主站解锁后直接将直流电压抬升至额定值Udcn,则定直流电压控制的换流器的电压高于另一侧,会产生一定的冲击电流[20],使得从站的换流器电容充电,到达稳定时解锁从站,则必有Upj+Unj MMC-HVDC向无源网络供电的结构图如图6所示,与有源网络相连的MMC作为整流侧,受端MMC与无源网络相连,工作在逆变方式下,为无源网络提供有功和无功。 图6 MMC-HVDC向无源网络供电结构图 图7 带斜率的定直流电压控制结构图 假设整流侧控制器定直流电压给出的斜率为K,整流站在0.1 s解锁,由带斜率控制的定直流电压控制继续给子模块电容充电,此时的子模块电容电压为:U0=GV0,U0(t)=GV0+KtV0 其中G为电容电压标幺值,V0为系统稳定后的子模块电容电压额定值,则单个的子模块随时间的电压增量为 (5) UZ=U0(t)-U0 (6) 每个桥臂包含20个子模块,两端MMC中共12个桥臂,每个子模块中含有一个电容,则总的储能增量为 (7) 为了防止逆变侧解锁时功率振荡,W必须小于交流系统对逆变侧传送的功率即 (8) 式中Uph,iph——交流系统能流过的最大相电压,相电流峰值。 作为启动控制,启动的时间也尤其关键,即在选取K值时,既要兼顾实际效果,也要兼顾启动的时间和避免产生振荡。 在Simulink中搭建两端的MMC—HVDC模型,一端为无源网络,模型采用最近电平逼近,电容电压平衡控制为:排序算法。有源侧MMC采用带斜率控制的定直流电压控制,无源侧采用定交流电压幅值和频率控制,有源侧交流电压为10 kV,额定容量为100 MVA,有源侧电阻为0.45 Ω,变压器一次侧采用三角形接法,二次侧采用星型接法,无源侧电阻为10 Ω,直流母线额定电压为22 kV,子模块个数为20个,桥臂电感为:10e-3。 不采用解锁顺序改进策略和不加入带斜率控制的定直流电压控制时:0.04 s解锁有源侧MMC,并抬升直流电压到额定值,0.2 s解锁从站MMC,仿真波形图如图8(a)(c)(e)所示。 采用逆变侧解锁顺序改进策略和加入带斜率控制的定直流电压控制后。其中相关的仿真波形图如图8(b)(d)(f)所示,其中图8(g)为改进前后整流侧直流电压对比图。 从图8(a)可看出,0.2 s解锁从站瞬间产生了1 300 A的冲击电流,过大的冲击电流对系统的稳定产生了较大的威胁,图8(b)为改进了解锁顺序后逆变侧解锁瞬间冲击电流为1 000 A,相比改进前的1 300 A降低了300 A。降低了系统的安全隐患和减低了系统制造成本。图8(c),(e)分别为整流侧阀侧的交流电流和交流电压。图8(d),(f)为改进后的整流侧阀侧的交流电流和交流电压,对比可知在采用了改进策略后对整流侧阀侧的交流电流和交流电压未产生负影响。从图8(g)改进前波形可看出改进前整流侧的直流电压在1 s时产生了较大的电压波动,峰值波动电压达到21.5 kV随后又降到接近19 kV,电压降达到2 500 V,并且直流电压2.1 s后才达到额定值,系统到达稳定所需时间较长。由图8(g)改进后波形图可知改进后的整流侧直流电压在1s时的电压波动从19.5 kV到18.5 kV波动幅度为1 000 V,相比于改进前的波动2 500 V,下降了1 500 V。并且直流电压达到额定值只需要1.4 s,比较未改进前的2.1 s快了0.7 s,而且随着斜率k值不断地靠近理想值,电压的波动将更小,启动的时间也将更短。 图8 改进前后的MMC-HVDC的启动控制波形图 本文针对两端MMC—HVDC的无源启动问题展开研究,将MMC—HVDC的预充电阶段分为不控充电阶段和可控充电阶段,分析了逆变侧解锁瞬间产生冲击电流的数学机理,改进了换流站解锁顺序,使得逆变侧解锁瞬间的冲击电流大幅度降低。改进了整流侧定直流电压控制,减少了直流电压抬升过程中的电压波动较大的问题,减少了系统达到稳定的时间。并在Simulink中搭建两端MMC—HVDC系统(一端为无源)模型进行仿真验证,根据实验仿真结果证实了上诉改进方案的可行性。3 无源启动方式的改进策略
3.1 一种无源预充电解锁顺序的改进
3.2 一种带斜率的定直流电压控制改进



4 仿真与验证


5 结论
