基于车道线消失点检测的车距测量方法研究*
2021-07-12杨清峻侯忠伟
杨清峻 侯忠伟
(1.重庆交通大学机电与车辆工程学院;2.重庆交通大学土木工程学院)

在智能交通系统中,先进驾驶辅助系统里的前方车辆距离测量是热点问题之一。目前,国内外主要的环境感知手段有激光、雷达、超声波和视觉传感器等,视觉传感器成本较低、信息量丰富,应用更为广泛,已经成为驾驶辅助系统获取外界信息的主要手段。在车辆行驶过程中,由于道路环境存在水平或垂直方向上的激励,摄像机的外部参数会发生变化,进而影响单目视觉测距的精度。针对上述问题,文章提出一种改进的车道线消失点检测的算法,实现前方车辆距离的测量。该方法使用车载摄像机拍摄的图像获取车道线信息,通过检测车道线消失点并实时更新消失点坐标,结合建立的单帧静态图像车距测量模型完成前方车距测量。
1 车道线检测
车道线无论是对传统汽车,还是智能交通系统中的车辆的行驶都能起到约束保障的作用,是道路中最主要的交通标志之一,不但可以减少交通事故的发生,而且在以后智能交通发展中,车道线检测都是一个必不可少的功能模块。近几年来,针对车道线检测的问题,国内外进行了大量的研究,而通过机器视觉的主要检测方法有2种,一个是基于模型的车道线检测方法[1],利用车道线几何特征建立匹配的数学模型,常见有直线型、曲线型和抛物线型等模型。然后根据模型对车道线进行拟合,但一种模型只适应于一种道路场景。另一个是基于特征的车道线检测方法[2],通过阈值分割和边缘检测等方法,将道路中车道线特征信息与其它特征信息的分割并提取。根据不同类别的特征信息,又分为颜色特征的检测、纹理特征的检测以及多特征融合的检测方法。
文章采取基于特征的车道线检测方法,摄像机采集到的初始图像因为噪声和边缘灰度化等因素的干扰,对边缘检测算法的检测结果有较大影响,因此选用Gauss滤波器来降噪以达到改善边缘检测的效果[3]。将初始图像进行灰度化处理,并利用Gauss滤波消除图像噪声,提高检测算法的效率,如图1所示。

图1 灰度化并Gauss滤波消除图像噪声
获得预处理图像通过OTSU算法进行分割得到车道线较为明显的图像。这里采用改进的OTSU算法。传统的OTSU算法灰度遍历包含整个灰度级,计算量较大[4]。当目标与背景的类内方差差别较大时,因阈值的偏向会降低分割效果。文章OTSU算法中阈值的选取根据图像中目标所占权重来调节,避免因目标与背景方差差别较大,阈值偏向目标之外的部分而过高[5]。因车载摄像机拍摄的前方道路图像中车道线占据较小比例,即图像灰度化均值靠近背景峰,故背景部分的灰度均值大于目标部分的灰度均值,初始分割阈值处于灰度最小值与图像灰度均值之间。将初始阈值以目标所占权重进行修正,使其位于双峰图像的谷点附近,即在灰度均值与白色灰度值之间,如图2所示。即调节最佳阈值,减少灰度级的遍历范围。分割效果如图3所示。

图2 一维灰度直方图

图3 OTSU算法检测车道线
2 ROI区域选取
简单预处理后的图像包含了如天空、树木和房屋等许多与车道线检测无关的信息,这些多余的信息不仅会影响算法的处理速度,更是影响车道线和车道线消失点的坐标的检测[6]。因此将图像中天空、树木、房屋等不影响检测结果的区域去除,减少图像中需要处理的像素数量,提高测量速度与精度。文章借鉴文献[7]中感兴趣区域确定方法,分析图像得到其中道路水平线v=vp,即在感兴趣区域ROI中,舍弃道路水平线以上0~50 vp行像素。ROI分割原理如图4所示。分割后的效果如图5所示。

图4 ROI分割原理图

图5 ROI区域图
在检测出的车道线区域内检测车底有效阴影,当在有效检测范围内准确检测到的车辆在图像所在的像素坐标系中所占的像素范围是25~120像素[8],在车道线区域内,选取长度在25~120个像素点的阴影线检测其在像素坐标系中的纵坐标。
3 消失点检测
将选取后的图像通过4个方向的Gabor滤波器计算图像中车道线的显著纹理方向,确定备选的消失点,然后采取基于距离的有效投票方法快速估计消失点的位置[8],并通过图像坐标系来确定消失点的坐标。选定的Gabor滤波器的方向有0、45°、90°及135°等[9],像素点h(x,y)处的Gabor滤波器的能量响应值排序为:

如果第1个和第4个值明显不同,那么h=(x,y)的取向可靠,否则该点不在取值内,定义该像素点的置信水平如公式(1)所示,且置信水平值小于阈值0.85的点不作为备选的消失点[9]。
通过显著纹理方向的像素点能量响应值最大值计算显著纹理方向。根据像素点h(x,y)与备选的消失点k(u,v)之间的欧氏距离d(h),来确定消失点[9]。采用基于距离的有效投票方案通过像素点h(x,y)和其与备选消失点连线的延长线和图像边界的交点的最大有效距离D(h)确定出可靠的消失点。其中有效距离与图像中车道线间的距离和延长线与水平线的夹角有关。当延长线与水平线的夹角γ在90°以内,则有l(h)=(w-y)/cos(γ);当夹角为90°时,l(h)=x;当夹角处于90°与180°之间时,则有l(h)=-y/sin(γ)。则最大有效距离有:
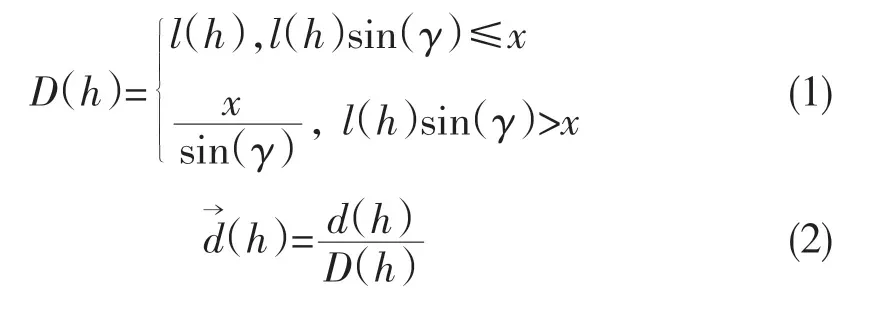
若h点的显著纹理方向θ(h)与延长线之间的角度小于给定的阈值 (tt=15°)[10],则原始消失点:

车道线消失点检测的试验效果如图6所示。

图6 车道线消失点检测
4 车距测量
传统的单目视觉前方车距测量方法是利用小孔成像模型通过透视投影变换来描述几何关系[11],先通过标定确定摄像机内部参数,然后根据摄像机安装的位置参数来推导出车距测量公式。
式中:h——车载摄像机的高度,m;
f——摄像机焦距,mm;
ω——摄像机光轴与车身纵轴线夹角;
θ——摄像机俯仰角;
y0——摄像机光轴与像平面焦点纵坐标;
y——前方车辆路面上投影点的纵坐标。
在车辆行驶过程中,路面激励与摄像机安装都对仰俯角和偏航角有很大影响,而不断变化的仰俯角和偏航角会给前方车辆的距离测量造成很大的误差[12]。
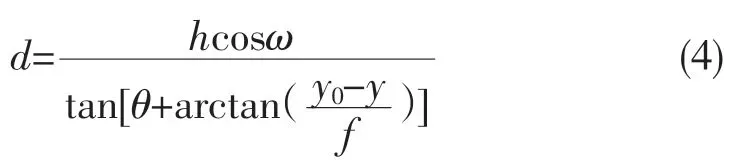
在标定出消失点在图像中的坐标后,建立基于消失点的车距测量几何模型如图7所示。
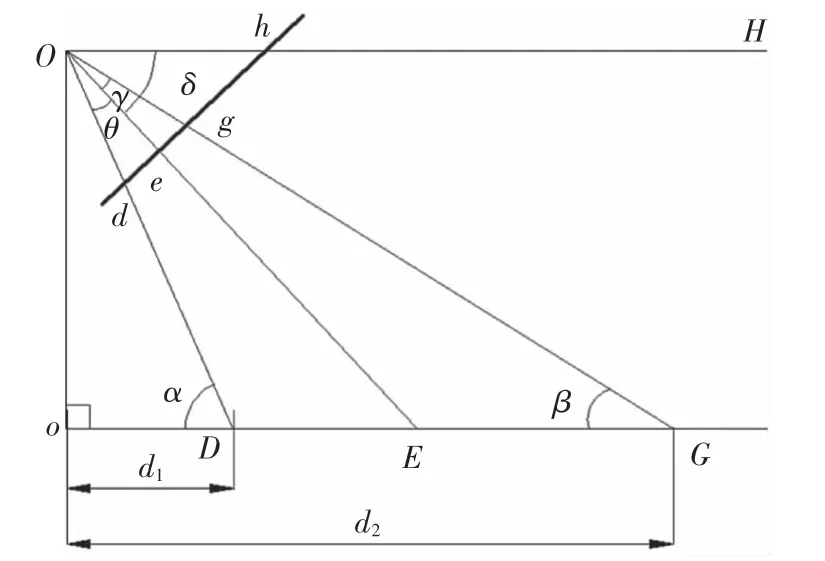
图7 基于消失点的车距测量几何模型
d1为摄像机与近视场点间的纵向距离,而在几何模型中,O e=f为摄像机焦距,在成像平面像素坐标系中,y轴的尺度因子μ=f/dy。从图像像素坐标系中获取到图像中近视场点d的纵坐标v1、点e的纵坐标v2和车底阴影上的点g的纵坐标v3,以及图像中车道线消失点p(u,v4),则有:

d1由安装车载摄像机后拍摄的图像下边沿对应路面上的点到摄像机的纵向距离测得。
5 实验与分析
为了验证上文提出的方法,通过某型号轿车上安装的摄像机获取测距所需图像,使用MATLAB标定工具箱标定摄像机内部参数及近视点坐标。如表1所示。

表1 参数标定
文章试验的运行平台为英特尔酷睿i5-2320@3.00 GHz、Windows 10、Matlab2015a。测距流程如图8所示。由于受实验条件限制,采用实际道路环境中前方车辆视频单帧车距测量。不同位置处的车距检测结果如图9所示。

图8 本文测距流程图
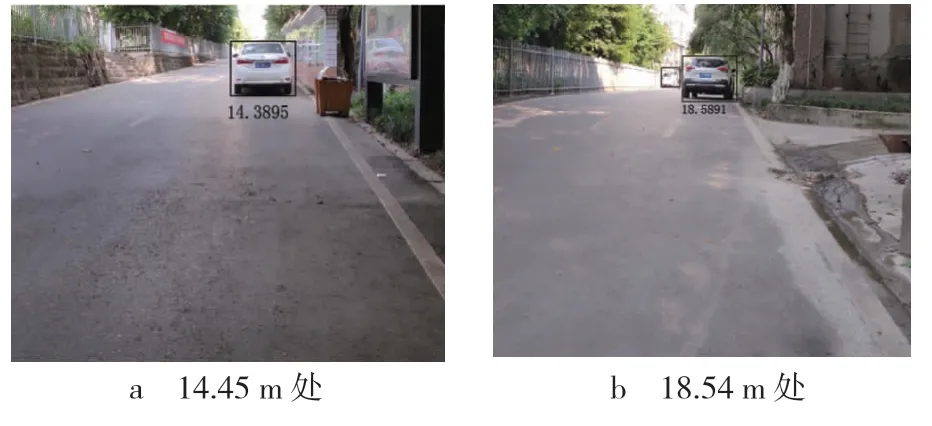
图9 车距检测结果
不同位置的测量结果如表2所示。将算法测量结果与文献[13-14]中的结果进行比较,如图10所示。

表2 测量结果

图10 误差比较
采用改进的车道线消失点检测方法,测量精度相对有所提高,误差相对较低且较为平缓。通过对比实际车距发现,还存在一定误差,产生的主要原因可能有:1)改进的车道线消失点检测在天气、阳光等的外界环境影响下,消失点坐标出现一定偏差,导致测量距离出现误差;2)采取的车底阴影范围检测导致车底阴影坐标有偏差,造成车距检测结果的偏差;3)在测距公式中,近视点d1的标定误差导致最终车距检测结果的误差。
6 结论
本文提出了改进的车道线消失点检测的车距测量,针对一些车载相机外部参数在行驶过程中发生变化,从摄像机成像的基本原理出发,利用车道线消失点的坐标,确定前方车距测量模型,不仅减少了需要标定的摄像机参数,也避免了摄像机高度和仰俯角等车载摄像机外部参数对测量精度的影响。实验表明,利用车道线消失点的车距测量方法能够较为稳定的测量前方车距。结果表明,文章设计的车距测量方法的测量结果准确率相对于改进前提高了1.61%,测量误差在3%以内,满足车距测量应用要求,对实现车辆主动安全有实际意义和应用价值。
