分布式驱动电动汽车转向失效控制研究*
2021-07-12朱文静李刚郭增江
朱文静 李刚 郭增江
(辽宁工业大学汽车与交通工程学院)

分布式驱动电动汽车采用线控技术替代传统的传动结构,具有驱动传动链短、效率高、结构紧凑等优点[1-3],线控技术将驾驶员输入转化为电信号实现汽车操纵,其控制方式灵活,响应快速精确,高度符合现代汽车电动化、智能化的发展需求[4]。但线控系统由大量的电子器件组成,器件的不稳定性增加了系统出现故障的概率,降低了汽车行驶的安全性,因此线控系统的失效控制研究具有重要意义[5]。文献[6-7]采用硬件冗余的方式提高转向系统的可靠性,文献[8]采用模型预测等算法处理执行器失效的问题,文献[9-11]针对传感器失效设计了包括故障诊断的容错控制策略。文章针对转向系统失效提出了差动转向力矩分配控制策略,经实验验证,该策略能有效解决单个转向电机失效时汽车无法正常转向的问题。
1 失效控制原理
分布式驱动电动汽车4轮独立驱动、独立转向,是典型的过驱动系统。当转向系统发生故障时,通过差动控制合理地对驱动或者制动力矩进行重新分配,将扭矩输送到4个车轮上,产生附加横摆力矩,实现车辆转向失效控制,完成转向,以确保车辆行驶的安全性和稳定性[12]。分布式驱动电动汽车转向控制流程图如图1所示。
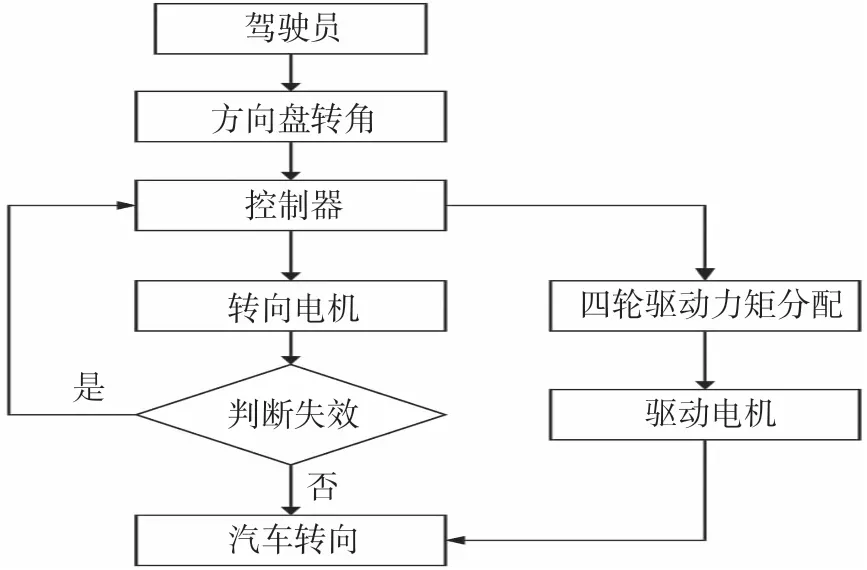
图1 分布式驱动电动汽车转向控制流程
2 失效工况策略
对于分布式驱动电动汽车,当4个转向电机同时故障时,车辆将无法进行转向。当某一个或多个转向电机发生故障的情况,此时转向系统不能完全实现正常转向,车辆转向不完全可控。以下为转向电机失效的3种情况:1)1个转向电机故障。只有1个转向电机失效时可能会出现4种工况:左前转向电机失效、右前转向电机失效、左后转向电机失效、右后转向电机失效。如果是前轮出现故障,则前轮采用差动力矩的方式实现汽车的转向功能。如果是后轮转向电机出现故障,则对2个后轮电机进行断电,只采用前轮进行转向;2)2个转向电机出现故障。当有2个转向电机出现故障时,会有3种工况:2前轮电机,2后轮电机以及异侧前后转向电机失效。前轮或者后轮电机失效时,采用纯前轮转向或者纯后轮转向方式,进行汽车转向功能的实现。异侧前后转向电机出现故障情况时,则使汽车停止行驶;3)3个转向电机出现故障。3个转向电机同时失控,只有1个转向电机能够转向,此时汽车失去转向功能,应立即停止汽车驱动或转向,避免危险情况发生。文章主要针对单个电机出现故障情况进行失效控制研究。
3 差动转向力矩分配
根据车辆行驶时实际横摆角速度与理想横摆角速度的差值,计算保证车辆稳定行驶的附加横摆力矩,然后把驾驶期望需求的总驱动力矩和附加横摆力矩值重新分配至4个驱动电机。整车控制原理图如图2所示。

图2 整车控制原理图
选取车辆线性二自由度模型为参考模型[13],在忽略车身及车轮侧偏角的情况下,可以计算出理想的横摆角速度:

式中:ωr——理想横摆角速度,(°)/s;
vx——纵向车速,km/h;
K——稳定性系数,s2/m2;
δ——前轮转角,°。
L——轴距,m;
计算横摆角速度时,考虑到路面的影响,则分布式驱动电动汽车的横摆角速度的范围为:

则可得知理想的横摆角速度模型为:

式中:μmax——路面峰值附着系数。
在分布式驱动电动汽车的转向电机出现故障的情况下,通过差动转向,重新分配4轮力矩保证车辆的操纵稳定性,以保证行驶中汽车的安全性与稳定性。横摆力矩决策控制器用来计算保证车辆稳定转向所需要的附加横摆力矩。在控制器设计上,选择了在实际工程中普遍使用的PID控制。将车辆行驶时实际与理想横摆角速度的差值输入到PID控制器中,计算出所需要的附加横摆力矩与横摆角速度的差值满足以下关系:

式中:Kp——比例因子;
KI——积分因子;
KD——微分因子;
ΔT——附加横摆力矩,N·m;
e(t)——横摆角速度差值,(°)/s。
分布式驱动电动汽车正常安全稳定行驶时,4轮驱动力矩是采用4轮平均分配方式。当转向系统出现单个转向电机失效的情况,进行差动力矩控制,根据横摆力矩决策控制器计算的附加横摆力矩值,对4轮进行力矩重新分配[14]。具体分配方案见公式:
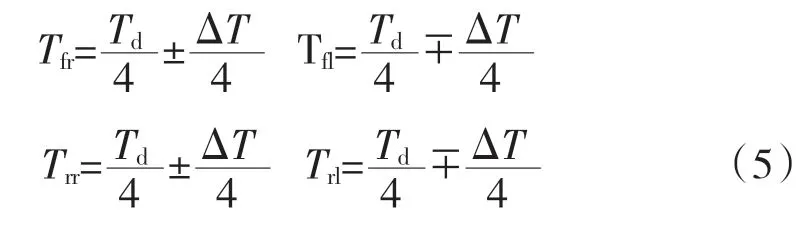
式中:Tfl、Tfr、Trl、Trr——左前轮、右前轮、左后轮、右后轮的驱动力矩,N·m;
Td——总的驱动力矩,N·m。
4 仿真验证
在CarSim和Matlab中建立的联合仿真模型,对控制算法进行实验验证。设置单轮电机出现故障(右后轮电机故障),分别选择圆周工况和单移线工况进行仿真。
工况1:右后轮电机失效,选择32 N·m定转矩输入,道路设置为圆周路面,半径150 m,附着系数为0.85。开环操纵车轮转角车速。
圆周工况仿真实验结果见图3。如图3a、3b所示:设置右后轮转向电机失效,此时的右后轮转角为0,有无差动控制下的其他轮皆能正常转向。如图3c所示:无差动控制时,汽车4轮力矩平均分配。如图3d所示:有差动控制时,控制策略分配4轮力矩,形成附加横摆力矩,实现汽车的差动转向。如图3e所示:电机故障无差动控制时,理想与实际横摆角速度有很大的差距,车辆行驶的稳定性下降。如图3f所示:电机故障有差动控制时,理想与实际横摆角速度基本保持一致,能够保证车辆按照期望转向。

工况2:车速为80 km/h,右后轮转向电机失效,单移线仿真实验,仿真时间为15 s。仿真结果如图4所示。图4a、4b为有无差动控制下的车轮转角曲线。图4c所示:转向失效时,无差动控制的汽车4个车轮的力矩分配曲线基本重合。图4d所示:转向失效时,有差动控制的汽车4个车轮的力矩分配曲线明显产生差别。图4e所示:在转向电机失效时,无差动转向控制的汽车理想横摆角速度与实际横摆角速度相差很大,汽车行驶相对危险。图4f所示:在有差动控制下的理想横摆角速度与实际横摆角速度基本一致,表明所设计的差动力矩控制策略能够保证汽车的正常行驶。


图4 高速工况仿真验证
分析图3、图4仿真结果可以得出:采用差动转向控制的汽车能够在转向电机失效后按照驾驶员的意图完成转向,并提高汽车的安全性和稳定性。
5 结论
文章提出的差动力矩控制策略在汽车中高速行驶、单电机失效的情况下,仍能良好地控制汽车转向行驶,提高了汽车行驶的稳定性与安全性。电机故障存在一定偶然性,因此只对单电机故障的工况进行了仿真验证,下一步研究应集中于2个或3个转向电机同时故障的工况,这对线控转向系统、分布式驱动电动汽车的发展意义重大。