广州地铁江街隧道结构自动化监测与分析
2021-07-09陈建京
陈 建 京
(北京城建勘测设计研究院有限责任公司广州分公司,广东 广州 510375)
1 概述
随着城市的建设发展,为了缓解交通拥堵,各大城市大力发展地铁建设,目前广州地铁运营千米数已达到530 km。随着地铁兴起,地铁周边地段商业价值越来越高,引起众多开发商投资建设。在地铁保护区域内建设施工极易引起地铁隧道结构发生变形,从而影响地铁安全运营。地铁隧道内作业条件对于传统的人工监测手段而言,无法做到随时了解地铁隧道结构发生变形情况。测量机器人自动化监测具有全天候24 h连续地自动监测,实时进行数据采集、数据处理以及将处理好的数据成果通过4G信号传输至远程控制计算机,随时能够了解地铁隧道结构变形情况。
2 自动化监测系统介绍
2.1 硬件部分
系统主要硬件设备包括:具有ATR功能的自动智能全站仪、参考基准目标棱镜、变形监测目标棱镜、计算机、网络通讯设备等,自动化监测系统硬件组成部分如图1所示。

1)自动智能全站仪:全站仪在监测系统中扮演着重要角色,它具备自动搜索、辨别跟踪以及精确照准目标棱镜等功能,并且能获取目标的角度、距离以及三维坐标。
2)基准及监测目标棱镜:基准点目标棱镜采用的是徕卡的全棱镜,变形监测目标棱镜是采用徕卡L型小棱镜,它们是监测系统中全站仪主要自动识别的目标。
3)网络通讯设备:主要由远程数据通讯接口、ADSL/光纤专线及路由器三部分组成,它们是实现全站仪与计算机双向通讯、控制以及监测数据传输的不可或缺部分。
4)计算机:实现远程控制全站仪,监测系统远程维护、数据管理及信息发布的主要设备。
2.2 软件部分
1)实时测量控制及解算软件。全站仪安置于变形监测区域内。主要采用自由设站方式,由全站仪自动精确照准影响区域外的基准点,通过该软件自动控制全站仪进行基准点的数据采集并实时对采集后的数据进行处理,计算出测站的准确坐标以及确定测站的变形。2)变形监测软件。变形监测软件是控制全站仪自动对变形监测点进行周期性地数据采集,同时能完成数据处理及分析、报表及时间关系曲线图自动生成输出等。3)远程控制。远程控制是通过安放在观测房中的ADSL有线通讯方式实现,由计算机通过ADSL专线与互联网连接,计算机通过IP地址或者通讯端口与之连接实现远程控制发送控制指令。4)信息发布管理系统。监测成果数据由全站仪采集完成后,自动上传到远程控制的计算机中,通过软件自动处理及分析后进行信息发布。
2.3 系统优点
1)建立高精度的参考点,采用自由设站测量方案,通过拟稳平差的方法可以最大限度利用参考点,分时段处理可以有效地减弱大气误差的影响,从而提高测量精度。2)简化了气象等附加设备,为系统在计算机的控制下实现全自动、高可靠的变形监测,创造了有利条件。3)在无人值守的情况下,可以实现全天24 h连续地自动监测,实时进行数据采集、数据处理,节约了大量的人力。4)在短时间内同时求得被测点位的三维坐标,可作全方位的预报[1]。
3 工程概况
从化大道下穿北星路隧道基坑设计起讫里程K3+061.5~K3+586.5,全长525.0 m,基坑底边宽30 m~31.5 m(泵房局部37.96 m),基坑深度为0.34 m~7.82 m(泵房局部深10.79 m)。基坑支护结构主要采用部分放坡、800 mm地下连续墙支护以及两道钢筋混凝土支撑的支护方式形成密封的止水系统。基坑安全等级为:基坑泵房处为一级,其他基坑区域为二级。基坑位于广州十四号线江街区间地铁隧道的正上方,对应地铁隧道左线里程起讫ZDK64+175.776~ZDK64+700.776;右线里程起讫YDK64+185.494~YDK64+710.494,基坑与地铁隧道结构间距为8.95 m~17.47 m,泵房位于地铁左线上方,与泵房最小距离为7.12 m。根据相关规范以及广州地铁安全运营管理条例要求,在地铁运营隧道安全保护范围内进行施工时,需要对该影响范围内的运营隧道结构进行变形监测。本次监测里程范围为:广州地铁十四号线一期江街区间隧道左线ZDK64+750 m~ZDK64+125 m;右线YDK64+760 m~YDK64+135 m。
4 监测网的合理布设
4.1 基准点的布设
十四号线江街区间隧道结构自动化监测采用独立坐标系统监测基准网,在受基坑开挖影响的范围外于地铁隧道左线里程ZDK64+770及ZDK64+105处和地铁隧道右线里程YDK64+780及YDK64+115处各安装2个徕卡圆棱镜作为基准点,共安装了8个基准点。以8个基准点的坐标作为左右线的监测系统基准数据。测量方法采用自由设站方式进行。测量技术要求详见表1~表3。

表1 平面网水平方向观测技术要求

表2 平面网距离观测技术要求

表3 高程观测技术指标限差
4.2 监测点的布设
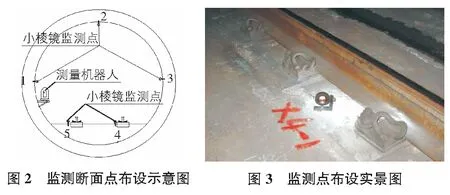
在江街区间地铁隧道里程左线ZDK64+750 m~ZDK64+125 m;右线YDK64+760 m~YDK64+135 m范围内,根据要求每10 m布置一个监测断面,监测断面两条隧道共布设126个。每个监测断面点位埋设5个监测点(见图2,图3),分别位于两条轨道旁边、隧道两侧中部位置以及隧道拱顶。两条隧道共布设了630个变形监测点,变形监测点采用徕卡L型小棱镜。
5 监测控制指标
本工程监测项目地铁隧道结构安全控制指标根据相关规范要求结合本项目的安全评估报告而定,具体数值见表4。
6 自动化监测数据采集及处理
首次数据采集时,先进行人工采集学习测量,待学习测量完成后监测数据采集通过远程控制实现,由远程控制计算机通过ADSL专线方式与互联网连接发出采集指令,根据监测频率要求,调整全站仪的数据采集时间间隔。进行数据采集、数据处理并计算出各监测点的变形量。通过网络实时传送至远程指定的服务器,最后通过网络可以下载数据进行分析(见图4,图5)。

表4 隧道结构各项监测项目预警值、控制值表 mm


7 监测数据成果分析
广州地铁十四号线江街区间隧道结构自动化监测贯穿整个下穿北星路市政隧道基坑施工过程,历时95 d。基坑开挖和结构施工结束前,监测频率按1次/d进行,基坑结构施工完成后至基坑回填覆土期间,每周监测2次,在回填覆土后一个月内进行了2次监测。整个过程共监测了46次,监测数据成果统计见表5。
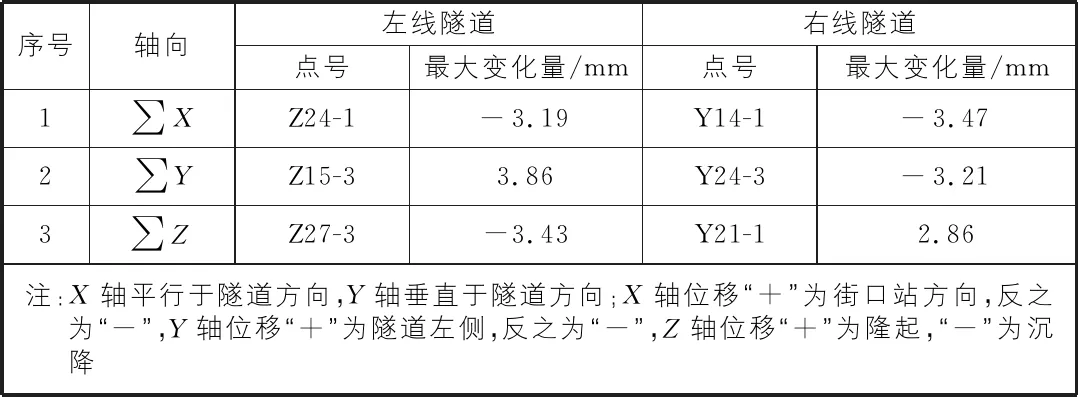
表5 监测数据成果统计表
根据数据成果显示,监测点X轴方向累计最大变形量为:左线隧道Z24-1(-3.19 mm)、右线隧道Y14-1(-3.47 mm);Y轴方向累计最大变形量为:左线隧道Z15-3(3.86 mm)、右线隧道Y24-3(-3.21 mm);Z轴方向累计最大变形量为:左线隧道Z27-3(-3.43 mm)、右线隧道Y21-1(2.86 mm)。以上各监测成果数据累计变化较小,监测数据稳定,均在控制范围内,为地铁安全运营提供高效保障。
8 结语
在运营中的地铁隧道作业人员无法随时下隧道测量作业,监测数据人工处理耗费大量时间。通过测量机器人自动化监测系统在地铁运营隧道结构监测中,介绍自动化监测系统原理、监测网的合理布设、数据采集及监测数据成果分析等。自动化监测系统具有高精度,且全天候24 h数据采集,可以有效解决人工监测在地铁运营隧道作业时间短及人工处理数据耗费大量时间的问题,大大提高了作业效率。同时也节省了人工成本,可以随时了解到隧道结构的变形情况,为地铁安全运营提供了高效保障,为今后类似工程项目提供借鉴。
