一种工业机器人打磨工作站的控制系统设计
2021-07-08李皓
李皓


摘 要:本文设计一种工业机器人的打磨工作站控制系统,打磨产品为风机机壳,从总体方案的设计,设备间的通讯设计,PLC程序几方面进行了阐述。
关键词:打磨 工业机器人 控制系统
Design of the Control System of an Industrial Robot Polishing Workstation
Li Hao
Abstract:This article designs a polishing workstation control system conducted by industrial robots. The polishing product is a fan casing. The design of the overall scheme, the communication design between the equipment, and the PLC program are described in the article.
Key words:polishing, industrial robot, control system
1 引言
随着国内传统制造产业的转型升级的需求,传统制造型企业对自动化的需求不断提高。传统的手工打磨作业存在打磨质量不稳定、效率低、且产品的均一性差。且工作环境恶劣,粉尘和噪声严重影响工人的健康。对打磨工人的技术水平要求相对比较高,产品的质量也不稳定,满足不了自动化生产需求。本文设计一种控制系统来实现对工业机器人打磨作业的控制,提高打磨作业的智能化程度以及工业生产的效率。
2 控制系统的设计要求
此设计打磨产品为风机机壳,工业机器人型号为IRB460(ABB),机器人末端执行器有打磨头和抓手用于打磨机壳和抓取机壳,实现的控制流程如下:
人工将产品放置在工装后,按下夹紧按钮后,夹紧气缸动作,将产品固定,机器人在得到产品到位信号后,开始按设定的程序进行打磨作业,打磨完成后,机器人手持工具切换为抓手,将产品搬运到指定位置。
打磨工作站有人机交互界面,使用者可在人机界面上切换手动和自动模式,自动模式下能实现整个系统的启动和停止的控制。手动模式能实现对气缸的点动控制,手动调用机器人打磨和搬运等程序的功能。
3 打磨工作站控制系统的总体方案
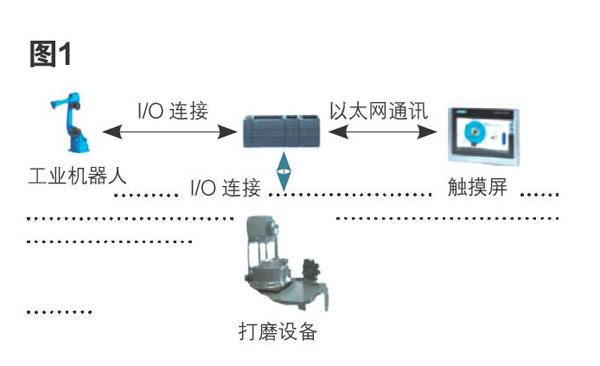
S7-1200 PLC与MCGS TPC7062TX触摸屏都有一个网口可进行以太网通讯,可实现与MCGS TPC7062TX的数据交互,实现工作人员通过在触摸屏来控制和监控现场产品的生产。S7-1200 PLC与机器人之间不需要进行数值量的传递,采用I/O连接来实现开关量的交互。S7-1200 PLC与打磨设备之间不需要进行数值量的传递,采用I/O连接来实现开关量的交互。
整体方案为:PLC作为主站,采用以太网通讯与MCGS触摸屏实现数据交互,采用IO连接与工业机器人和打磨设备实现开关量的交互。
4 打磨工作站的主要控制设备选型
打磨工作站控制系统采用S7-1200PLC,S7-1200是西门子公司推出的新一代PLC,作为 S7-200的升级替代产品,其模块化设计,扩展灵活;集成了多种强大的工艺功能,可满足自动化系统中的特殊需求;通讯模块和集成的PROFINET接口,可实现自动化领域的多种通讯机制,满足设计要求。
触摸屏采用TPC7062Ti,是一套以先进的Cortex-A8 CPU为核心的高性能嵌入式一体化触摸屏。该产品设计采用了7英寸高亮度TFT液晶显示屏,四线电阻式触摸屏。同时还预装了MCGS嵌入式组态软件(运行版),具备强大的图像显示和数据处理功能,满足设计要求。
5 打磨工作站控制系统的通讯连接
5.1 S71200PLC与MCGS的通讯
S7-1200PLC与MCGS采用以太网通讯进行数据交互。他们通过各自的网口进行以太网通讯。
在各自的配置软件中使MCGS和PLC双方IP地址在同一地址段并保持一致,使双方通讯上。
PLC与机器人之间的通讯连接。
S7-1200PLC它有22个数字输入信号,10个数字输出信号。使用的IRB460工业机器人的标准IO板卡有16路数字输出信号,有16路数字输入信号。它们提供的IO点满足设计需求。PLC和机器人相关I/O分配表和IO连接图见下表1。
外部按钮及传感器与PLC通讯。
本设计PLC另需要外接一个按钮和一个传感器。它们的IO分配及接线图见下表2。
6 PLC程序设计
打磨工作站控制程序流程规划,见图3。
程序编写
(1)主程序设计
程序从主程序开始,在程序段1调用自动FC块,在程序段2调用手动FC块。
用M0.4来进行自动和手动的选择,并将M0.4与MCGS自动手动按钮关联。
(2)手动程序设计
在手动程序里,分别用M0.1调用机器人打磨程序,用M0.0调用机器人搬运程序,用M0.2调用机器人取件动作,用M0.5来控制夹紧气缸。
其中M0.0与MCGS里的搬运按钮关联,M0.1与MCGS里的打磨按钮关联,M0.2与MCGS里的机器人取件按钮关联,M0.5与MCGS夹紧气缸点动按钮关联。
(3)自动程序设计
(1)在程序段开始设计为系统启动和系统停止互锁。操作人员在自动模式下按下自动启动按钮,步骤号值被置为0。
(2)步骤号为0时,操作者将打磨工件安装在打磨工装上,按下气缸夹紧按钮,工件被夹紧,打磨传感器检测到产品,步骤号自加变为1。
(3)步骤号为1时,PLC发出机器人打磨信号,机器人打磨完后,步骤号自加变为2。
(4)步骤号为2时,PLC发出机器人取件信号,机器人切换抓手工装将打磨工件进行取件动作,机器人取件完成后,步骤号为4。
(5)步驟号为4时,PLC发出机器人搬运信号,机器人搬运完后,步骤号为0,形成步骤循环,见图4。
部分程序设计图。
7 结语
论文简要叙述了打磨工作站控制系统的设计过程,未来还有很多方面可以进行优化提升,可以从采用更先进的视觉传感器和力觉传感器,来实现复杂打磨工件的智能化打磨,可以预见未来的打磨控制系统将有更长远的发展,PLC控制系统将更加智能化。
基金项目:武昌工学院课程联动改革项目———机器人技术与应用课程模块。
参考文献:
[1]王寐.抛光打磨机器人控制系统的设计与实现[D].广东工业大学,2017.
