一种高速多体船的有限时间减纵摇控制方法
2021-07-07刘志林戴小康李国胜
张 军 刘志林 戴小康 李国胜
(江苏大学电气信息工程学院1) 镇江 212013) (哈尔滨工程大学自动化学院2) 哈尔滨 150001)
0 引 言
高速多体船具有良好的横向稳定性、耐波性、机动性等优点[1],是现代高技术船舶的重要发展方向.然而在恶劣海况航行时,高速多体船独特的线型和结构使得纵向倾覆力矩较大,恢复力矩较小,导致纵摇和升沉变化幅度过大.剧烈变化的纵摇和升沉进而产生了过大的垂向加速度,造成船上人员极易晕船,严重影响适航性和工作效率[2].因此,如何有效抑制的升沉和纵摇幅度成为多体船研究的重点.目前高速多体船通常安装T形翼和压浪板实现协同减摇,其中加装T形翼降低多体船的垂向运动响应,加装压浪板改善船舶运动姿态,达到减阻的目的[3-4].高速多体船减摇控制的目标是同时控制升沉/纵摇运动,减少升沉/纵摇运动幅度.但是,多体船属于多输入多输出系统,并且升沉和纵摇运动模型具有多耦合特性,水动力学系数很难精确获得,系统存在不确定动态和其他未建模特性,这给减摇控制带来了困难.
目前,多体船减摇控制方面的研究文献较少.针对多体船的非线性耦合模型,文献[5]采用纵摇/升沉分离设计比例微分控制律,通过传递函数的解耦矩阵实现升沉和纵摇的解耦,大幅限制了升沉和纵摇运动幅度,但是该方法需要花费大量的时间离线调试参数,鲁棒性较弱.为了解决鲁棒减摇问题,文献[6]基于Golubev算法建立了从T形翼和压浪板到升沉、纵摇运动的传递函数,设计高阶定量反馈纵向减摇控制器.但是,该方法不能减小纵摇/升沉系统之间的强耦合非线性关系,无法解决多体船在整个航迹内的控制问题.文献[7]提出了高速多体船升沉和纵摇的多变量H∞鲁棒控制策略,设计出了满足系统鲁棒性能要求的控制器,但是需要求解高维线性矩阵不等式,计算复杂很难应用于实际中.
扩张状态观测器是解决含有模型不确定情况下控制问题的有效手段,能够有效估计和补偿模型不确定性带来的影响[8-11],但是对于复杂多通道系统的耦合运动量观测及补偿问题研究较少.针对多体船升沉和纵摇的多耦合、不确定性的控制问题,本文采用反馈+补偿的策略,即提出了有限时间反馈控制+有限时间扩张观测器在线估计方法,设计解耦的减摇控制方法.首先,建立由T形翼和压浪板作为减摇附体的多体船控制模型,将控制模型分解为解耦模型和耦合量两项.其次,将纵摇和升沉运动的耦合量作为不确定量,采用有限时间扩张观测器快速在线实际估计进行补偿;对解耦的纵摇和升沉模型设计有限时间反馈控制律来补偿扩张观测器观测状态和干扰的误差,以此提高闭环系统抑制干扰的能力和鲁棒性.最后,将反馈控制和补偿控制量进行综合,获得了虚拟的控制量,通过减摇附体控制分配矩阵得到T形翼和压浪板的攻角.最后,通过仿真验证所提算法的有效性.
1 高速多体船的垂向运动模型
1.1 高速多体船的耦合垂向运动模型
T形翼和压浪板利用翼面产生的恢复力和力矩用来抵消波浪的力和力矩,从而减小升沉和纵摇的幅度.假设多体船以稳定航向和定常速度在无限深水域航行,水下部分的片体足够细长,波浪扰动引起的船体运动微辐,不考虑风和流对运动的影响.在海浪扰动作用下,关于升沉和纵摇耦合运动的数学模型为
(1)
(2)
(3)
MT-foil=FT-foillT-foil,Mflap=Fflaplflap
式中:ρ为海水密度;A为T形水翼面积;CL为水翼的升力系数;V为流体相对水翼的速度;CL1为压浪板升力系数;S为压浪板的有效面积;α1为压浪板攻角;α2为T形翼攻角;lflap,lT-foil为压浪板和T形翼的力臂.从式(3)可见:多体船运动模型的纵摇和升沉运动具有相互耦合特点,并且水动力学系数是通过船模或实船试验测得,具有较强的不确定性.高速多体船的减摇控制目标是同时控制升沉/纵摇运动,减少升沉/纵摇运动幅度,并抑制参数不确定和海浪扰动.
1.2 建立解耦的垂向运动模型

(4)
式中:x11,x22为纵摇和纵摇角速度,这里作为解耦升沉模型的不确定项;Δf1为升沉运动模型的参数不确定项.解耦的升沉模型(4)改写为下面的一般不确定形式
(5)
采用图1的反馈+补偿的策略设计解耦减摇控制,其中有限时间扩张观测器估计补偿纵摇和升沉运动和耦合量,有限时间反馈控制提高闭环反馈控制的减摇性能.
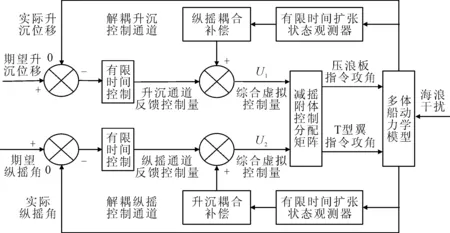
图1 多体船的纵向减摇解耦控制框图
2 解耦纵摇和升沉的扩张状态观测器

(6)
设计了一种非齐次的有限时间内收敛的扩张状态观测器.
(7)

(8)
构造Lyapunov函数[12]
(9)
写成下面形式
V=ξTPξ
(10)

由式(10)得
(11)
对ξ求导可得
(12)

对式(10)求导可得
(13)

(14)
由式(14)可得
(15)
根据式(11)可求得
(16)
则式(16)可写成
(17)
根据有限时间稳定引理1,如果λmin{Ω1}‖ξ‖2≥L‖Γ‖2,则误差系统是有限时间稳定的,且在有限时间内收敛到
(18)
因此,可选择合理的参数使得L‖Γ‖2/λmin{Ω1}<1,则误差系统‖ξ‖2在有限时间内充分小.
3 有限时间控制器设计
采用有限时间扩张观测器在线快速估计升沉和纵摇运动的耦合量,但是扩张状态观测器在耦合量和海浪随机扰动变化过大时观测能力下降,影响整体减摇控制效果.为了进一步提高减摇控制效果,减摇反馈控制律采用有限时间控制,这是因为有限时间控制器中带有分数幂项,使得有限时间闭环控制系统与非有限时间闭环控制系统相比,具有更好的鲁棒性能和抗扰动性能[13-14].
对于解耦的升沉运动系统模型为
(19)
设计如下形式有限时间控制输入
u1=(m+a33)[-k1siga1x1-k2siga2x2-
(20)

证明:将控制律式(20)代入系统式(19),得到
(21)
选定Lyapunov函数为
对其求导得到
(22)

将解耦的纵摇和升沉反馈控制量和耦合项估计值进行综合,获得纵摇和升沉的虚拟控制量为
(23)
(24)

(25)
将控制律式(23)代入升沉模型式(5),其系统闭环形式为
(26)
选定Lyapunov函数为
(27)
对其求导有
(28)
由于在有限时间内扩张观测器的观测误差是充分小,因此|e3|是有界,升沉控制闭环系统是有界稳定.同理可证,纵摇控制系统是有界稳定.
4 仿真分析
根据文献[3]的多体船模型来验证设计的有限时间减摇方法有效性.多体船在高速航行时受到的海况等级为四级海况,海浪采用P-M谱进行仿真,为
式中:vζ为海面以上高度为19.5 m处的平均风速,m/s;g为重力加速度,9.81 m/s2;Sζ(ω)单位为m2·s.根据切片法,求得不同频率点下海浪作用于多体船的干扰力和干扰力矩,通过数据拟合和叠加的方法,仿真过程中,多体船航速为14 kn,迎浪航行,遭遇角频率取1.3 rad/s,可以得到随机海浪作用于多体船的干扰力和干扰力矩,见图2.分别用带有减摇控制器与不加控制器的多体船进行仿真比较分析,仿真结果见图3~4.
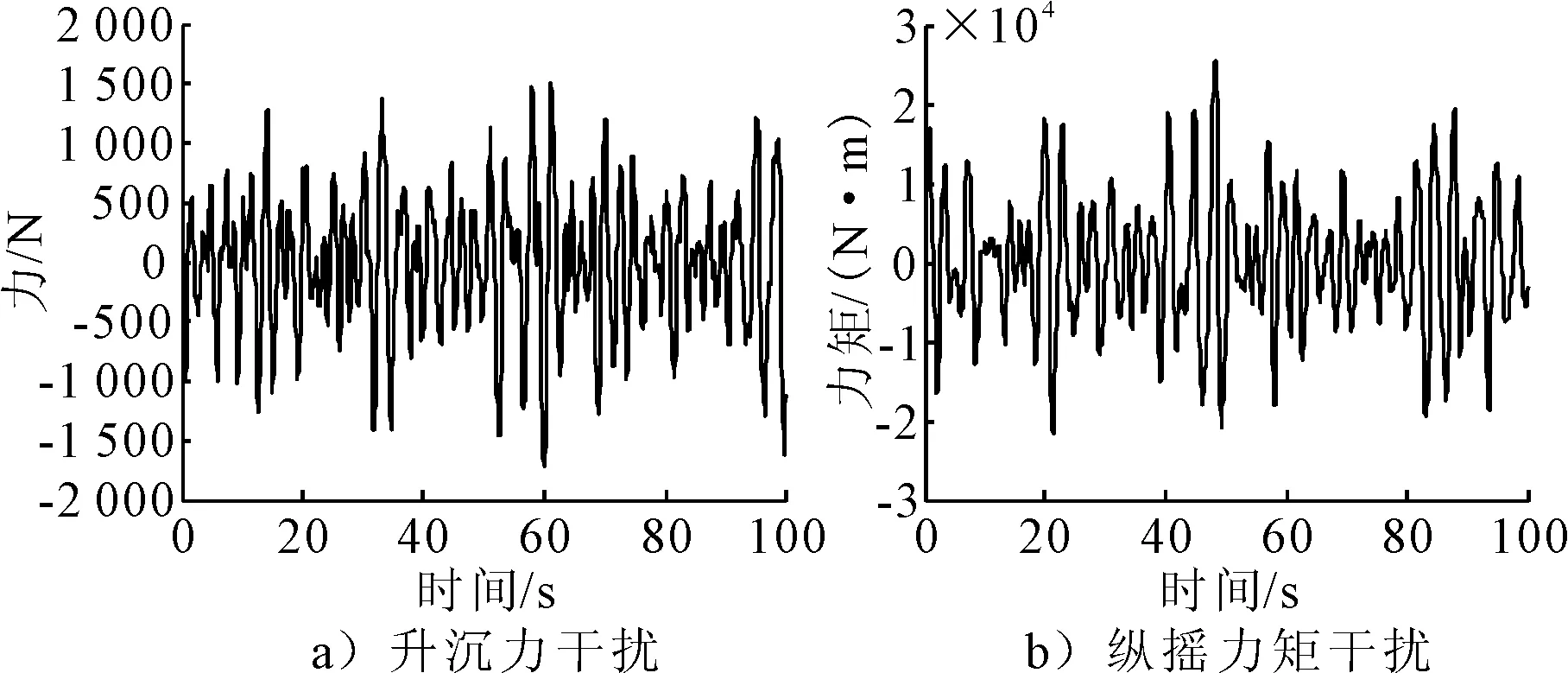
图2 升沉力和纵摇力矩干扰
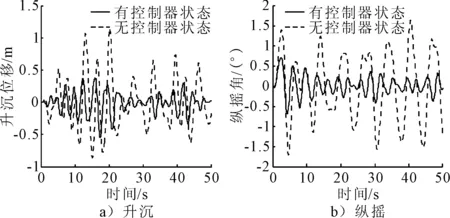
图3 多体船的升沉和纵摇运动曲线
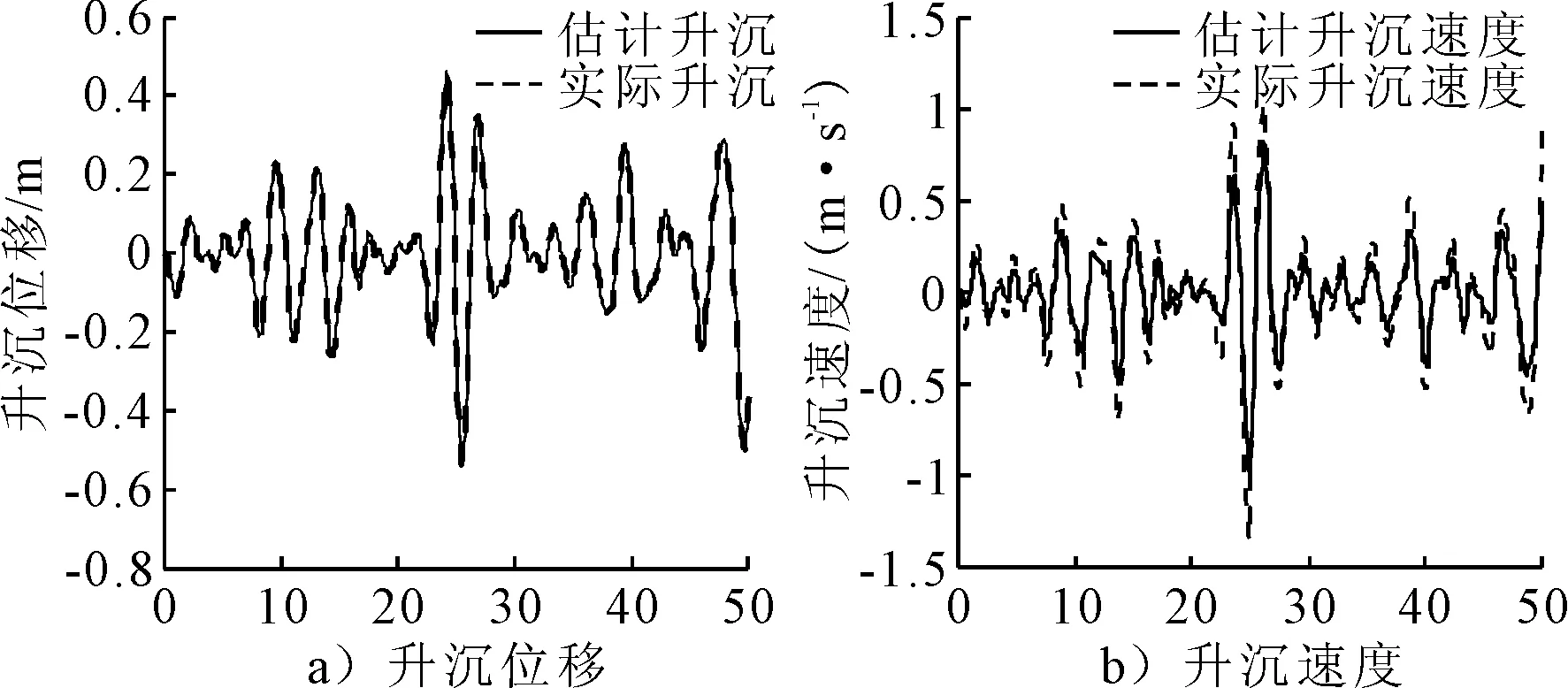
图4 实际和估计的升沉位移和速度
由图3可知,多体船在解耦减摇控制作用下下,升沉运动量减少20%~35%,纵摇运动量减少40%~50%,升沉与纵摇的减摇达到预期效果,这说明对于升沉和纵摇的耦合处理策略合理有效.由图4可知,设计的有限时间扩张状态观测器估计升沉位移的观测误差很小,但是估计升沉速度时观测能力下降,有明显的观测误差,在本文提出的有限时间反馈控制律作用下,可有效抑制了观测器误差和模型不确定性,保持较好的减摇效果.
5 结 束 语
为了解决高速多体船在航行中纵摇和升沉运动幅度过大的问题,提出一种有限时间减纵摇控制方法.建立由T形翼和压浪板作为减摇附体的解耦纵摇和升沉的控制模型,设计有限时间控制律提高了闭环系统的鲁棒性.提出有限时间扩张观测器快速在线估计纵摇和升沉的耦合项,将反馈控制量和补偿量进行综合,通过减摇附体控制分配矩阵得到T形翼和压浪板的攻角,并通过数字仿真验证所提算法的有效性.
