基于改进鲸鱼算法和模态柔度的两阶段结构损伤识别
2021-07-07杨雨厚成希豪朱志刚黄民水
杨雨厚,成希豪,朱志刚,罗 金,黄民水
(1. 广西北部湾投资集团有限公司, 广西 南宁 530029; 2. 广西大学 土木建筑工程学院, 广西 南宁 530004;3. 广西交科集团有限公司, 广西 南宁 530007; 4. 武汉工程大学 土木工程与建筑学院, 湖北 武汉 430074)
结构健康监测主要目的是持续跟踪和评估可能影响结构运行、可用性或安全可靠性的退化或损坏症状[1]。那么损伤识别的基础是,通常结构损伤是由于结构的截面积、质量等这些物理参数发生改变所引起的,这些变化会使得结构的刚度矩阵和质量矩阵等发生改变,进而影响到结构动态特性[2]。在实际结构中,通常结构的动态特性较于物理参数更易获取而且更精确,因此可以通过现在采集的实际结构动态特性结合有限元分析计算出来的数据对该结构健康状况进行评估。在基于结构模态参数进行损伤识别的这类问题中,首先需要设置损伤工况,然后根据这些损伤工况记录结构模态参数[3,4]的变化情况,其中最重要的是选取损伤识别指标对其进行损伤定位,最后根据优化方法计算出相应的损伤程度[5,6]。
本文结合模态柔度方法在定位损伤位置上的优势和鲸鱼优化算法在求解优化问题上的高效、准确性,将损伤识别问题划分成两个问题:损伤位置的确定以及量化其对应的损伤程度。首先,本文对基本的模态柔度方法进行了改进,提出了叠加模态柔度差曲率指标用于定位结构发生损伤的位置;其次,将削弱板结构“临近效应”的方法[7,8]引入到该指标;最后,通过改进的鲸鱼优化算法迭代求解损伤位置相对应的损伤程度。
1 改进模态柔度方法
无阻尼自由系统,其微分方程式表示为:

(1)
式中:M和K分别为系统的质量矩阵和刚度矩阵;x为位移向量。
将质量矩阵和刚度矩阵进行正交化:
φTKφ=Λ
(2)
φTMφ=I
(3)
式中:φ为整体结构的振型;Λ为系统特征值的对角矩阵;I为单位矩阵。
对式(2)做一次变换,可将刚度矩阵K表示为:
K=φ-TΛφ-1=(φΛ-1φT)-1
(4)
柔度矩阵D与刚度矩阵K的关系由式(5)表示:
D=K-1
(5)
将式(4)代入式(5)中,可以得到:
(6)
式中:φi为第i阶振型;ωi为第i阶固有频率。 本文基于现有的柔度差曲率矩阵法[9](Flexibility Curvature Matrix Based on Mode,FCMD)、模态柔度改变率(Rate of Modal Flexibility,RMF)、模态柔度改变率曲率[10](Rate of Modal Flexibility Curvature,RMFC),提出了叠加模态柔度差曲率(Superposition of Modal Flexibility Curvature,SMFC)。
该方法由结构的柔度矩阵入手,由于低阶模态所包含的模态信息较多,可通过相加的方式来扩充其信息。而且,在结构损伤区域附近,柔度值会有较大的改变,通过对坐标位置的二阶导数作用即求柔度曲率。最后对损伤前后的曲率求差,即叠加模态柔度差曲率,其变化的程度将会变得更加明显,计算得到的局部极值可直接用于识别损伤位置。
计算步骤如下:
(1)对模态柔度矩阵逐行相加
Fu=sum(Du,2)
Fd=sum(Dd,2)
(7)
式中:D为结模态柔度矩阵;上标u和d分别表示损伤前和损伤后;sum(D,2)表示对矩阵的各行元素求和。
(2)计算SMFC指标
利用中心差分理论计算上步中两个列阵的曲率MFC:
(8)
式中:i对应于模型的第i个节点;d为相邻节点的距离,即为单元的长度。
最后,对两者作差计算得出SMFC的值:
SMFC=MFuC-MFdC
(9)
该指标的损伤位置判别方式是,损伤处的SMFC值会产生突变,突变位置即是结构中发生损伤的位置。其工作基础是:当结构中存在损伤时,会导致结构的刚度减小,由式(5)可知,结构的柔度增大,依据SMFC指标的计算方法,结构中损伤位置的SMFC会随之增大,因此所绘制的SMFC(i)曲线中,曲线的突变处即为损伤的区域。
2 鲸鱼优化算法
2.1 基本鲸鱼算法
(1)追踪猎物阶段
根据鲸鱼优化算法(Whale Optimization Algorithm,WOA)算法这个名称可知,该算法是模拟鲸鱼的捕食过程来追踪捕食猎物。但是理论与实际往往存在出入,在面对实际问题时,需要假定WOA算法中的当前种群的目标猎物为实际问题的最优解,那么种群中的所有个体将向着捕食该目标猎物进行移动改变自身位置,其数学表达式下:
(10)
(11)

(12)
(13)


(14)
式中:Max_iter为最大迭代次数。
(2)捕食猎物阶段
WOA算法的捕食猎物阶段同样类似于鲸鱼捕食行为。首先计算鲸鱼与猎物之间的距离:
(15)
然后,用对数螺旋方程来表示鲸鱼和猎物之间的位置,如式(16)所示。
(16)
式中:b是一个常量,用来确定螺旋的形状;l为-1~1的随机数。
而且为了模拟鲸鱼捕食行为的两种方式,假设在更新个体位置时按照式(15)或(16)进行,两种方式运行的可能均相同,其数学模型如下:
(18)
式中:p为算法选择式(15)或(16)两种方式更新的概率。
(3)寻找猎物阶段
(19)
(20)

2.2 改进的鲸鱼优化算法(EWOA)
基本WOA算法并不是完美无缺的,它也存在着容易陷入局部最优,计算效率不高等不足,本文针对这些缺点在基本WOA算法的基础上提出了增强型的鲸鱼优化算法。
(20)
式中:ωmax为最大非线性权重;ωmin为最小非线性权重。
(21)
(22)
(23)
为了针对基本鲸鱼优化算法易陷入局部最优这一缺点,引入了微分扰动因子λ,可以使种群个体更易跳出局部最优实现全局最优求解。
(24)
式中:F为扰动常量。
因此,式(21)可更新为:
(25)
然而,式(23)中的对数螺旋方程可能不是最好的更新方式[12],如果螺旋步长的范围过大,基本的WOA算法将无法对整个寻优空间进行搜索。本文将式(23)中的对数项改为常数项,式(23)更新如下:
(26)
综上所述,改进后的WOA算法的具体数学模型为:
(27)
2.3 算法性能评价
引入常见的测试函数,将EWOA算法与WOA算法进行对比来展现EOWA算法的优劣。
相关测试函数为:
(28)

(29)

(30)

(31)
设种群大小为100,最大迭代次数为500次,取最大非线性权重和最小非线性权重分别为ωmax=0.9,ωmin=0.4,扰动常量F=0.6。图1为测试函数计算迭代图。
例如,教师在向学生演示了水果中维生素C的还原性实验后,鼓励学生在掌握实验原理和步骤的基础上,对生活中的水果的其他元素进行实验探究,不仅能让学生在生活中巩固化学理论知识,更能让学生在实践中锻炼实验操作技能,提高学生的化学实验水平。学生在高中阶段面临着巨大的学习压力,教师如果能在教学过程中将理论知识与生活结合起来,既能加快学生对知识的理解与接受效率,又能适当缓解学生的学习难度,让学生在相对轻松的环境中进行学习,从而提高学生的学习效率。
从图1可知,EWOA算法与WOA算法相比能够跳出局部最优,实现全局最优求解,在计算效率上能更快地计算出最佳值。

图1 测试函数计算迭代图
3 损伤识别流程
3.1 目标函数
通过测量柔度矩阵[13,14]与用数值模型计算的相应柔度矩阵之间的差异来建立目标函数。
(32)
式中:F为柔度矩阵,通过式(6)求得其上标E和A分别表示损伤模型和数值模型;x=(x1,…,xN)∈[0,1]N为设计变量,表示刚度折减系数。
3.2 损伤识别步骤
本文所提方法的主要步骤如下:
(1)运用SMFC指标判断结构损伤:1)计算整个结构的SMFC值;2)计算削弱“临近效应”后改进的SMFC值。
(2)运用改进鲸鱼优化算法(EWOA)对目标函数进行若干次优化迭代,从而计算出上步定位出的损伤位置程度。
4 损伤识别
4.1 数值算例
简支梁全长5 m(图2),结构弹性模量为30 GPa,横截面面积为0.072 m2,材料密度为2360 kg/m3,截面惯性矩为8.64×10-5m4。用刚度矩阵的折减来表示结构损伤,并虚设了单点和多点两种损伤工况,见表1。其损伤定位结果与上节所述FCMD,RMF,RMFC指标进行对比,见图3。

图2 简支梁结构简图
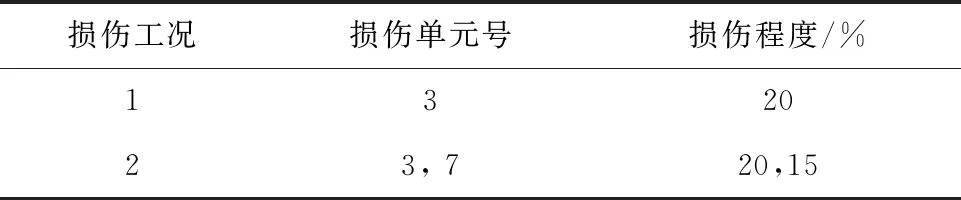
表1 简支梁损伤工况
根据SMFC曲线的突变处来确定结构中的损伤位置。从图3a~3c中可以看出FCMD和RMF中的最大值即是结构中的损伤位置,但是其临近单元的指标值相比于其他未损伤单元而言同样也很大,那么当损伤很小时就会影响损伤单元的判断;而RMFC只能粗略地定位出结构中的损伤位置。
综上所述,SMFC指标可以有效地识别出结构损伤区域位置,现有指标FCMD,RMF,RMFC也能够识别出损伤位置,但还是劣于SMFC指标。

图3 工况1与工况2下简支梁损伤识别参数对比情况
采用EWOA算法对上述两个数值进行迭代求解时,其相关参数:种群大小为100,最大迭代次数为50次,最大非线性权重ωmax=0.9,ωmin=0.4,扰动常量F=0.6。将本文中第三部分所提出的两步法和直接法进行对比,结果如图4,5和表2所示。
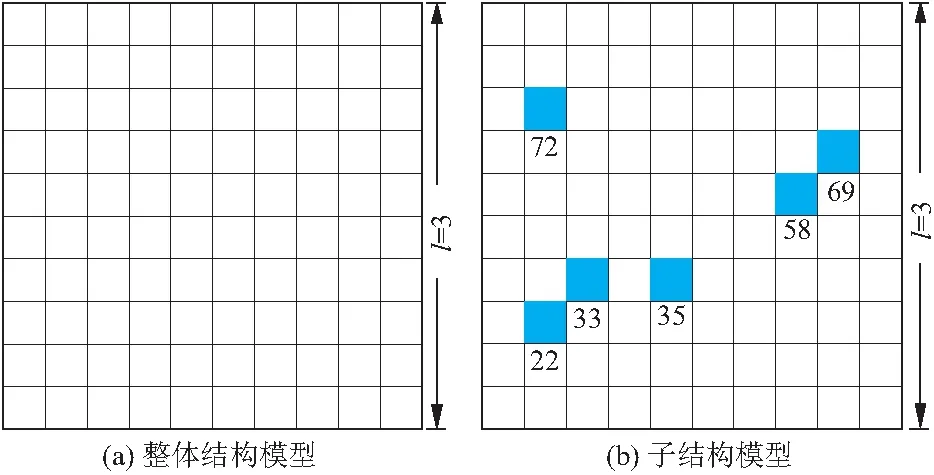
图4 四边简支板模型/m

图5 简支梁损伤识别结果

表2 四边简支板的损伤识别结果
由最终量化损伤程度的结果可知,对于单点及多点损伤,该方法能在准确定位出损伤位置的同时也能精确地量化出对应的损伤大小。在单点损伤情况下,直接法对梁结构的损伤识别有1.14%的误差,对板结构的识别效果较好,在多点损伤情况下,直接法均不能得出较好的识别效果,最高误差高达2.5%。
4.2 简支梁试验
简支梁全长为5 m,共划分为10个单元,每个单元长0.5 m,所用单元为2结点6自由度单元。结构的弹性模量为30 GPa,横截面面积为0.072 m2,材料密度为2360 kg/m3,截面惯性矩为8.64×10-5m4。如图6所示,本试验采用加质量块方式来模拟损伤。质量块的重量为20 kg,长0.3 m,宽0.2 m,厚0.15 m。通过增加梁质量百分比来估计真实损伤程度[15]。
以简支梁模型为例,假设其约束条件不变,考虑质量变化对其自振频率的影响,简支梁第n阶无阻尼自振频率的数学表达式为:
(33)
式中:l,b,h分别为简支梁的跨度、宽度与高度;E为混凝土弹性模量;M为简支梁质量。
由式(33)可知,当质量越大时,简支梁的自振频率越小。用加质量块方式来模拟损伤,当加的质量块越重时,其损伤程度也就越大。
图6 试验设置
本试验设置了3种损伤工况,见表3。加质量块的位置选在距离左端支座2.5 m处。从表3可知,频率随着损伤程度加剧而减小,本试验选取前四阶测量频率与振型进行损伤识别。
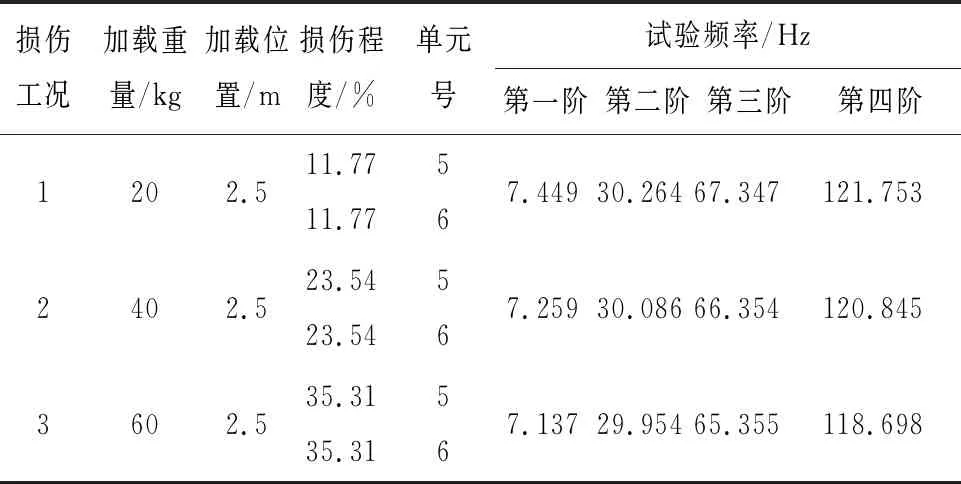
表3 结构损伤工况
将损伤工况1~3的损伤数据分别引入基准有限元模型,并与基准有限元模型计算的模态数据相结合形成目标函数,通过改进的鲸鱼算法对SMFC指标所判断出的可能损伤单元进行识别,并与直接法(即不用叠加模态柔度差曲率指标进行损伤定位,直接运用改进的鲸鱼算法对简支梁共10个单元进行损伤识别)进行比较,损伤识别结果如图7所示。

图7 损伤识别
与直接法相比,本文提出的方法(两步法)可以大大减少识别出的损伤单元数,并能准确识别损伤的严重程度。对于损伤工况1~3而言,采用两步法时,其识别最大误差为0.82%,而直接法的最大误差为4.87%。因此,采用两阶段方法对结构进行损伤识别时具有更准确的特点。
5 结 论
根据数值算例的结果,可以得出以下结论:
(1)提出了SMFC指标来确定梁结构和板结构的损伤位置。与FCMD,RMF,RMFC指标相比,SMFC指标可以更好地定位出梁结构中的损伤单元。同时,提出了一种减少“临近影响”引起板结构虚假报警的方法,以进一步改进SMFC。
(2)通过四个基本测试函数证明了EWOA算法在计算效率与计算精度上均有一定的改善,其收敛速度加快且能够跳出局部最优,实现全局寻优求解。
(3)数值算例结果表明本文方法能够有效识别出二维梁结构和板结构的损伤位置及其对应程度。
(4)用简支梁试验来验证了本文所提出方法的有效性,为实际结构的损伤识别提供了一种新思路。
