长距离单车道隧道无轨运输智能避让系统研制及应用
2021-07-05赵海雷曾垂刚王利明李凤远
赵海雷, 曾垂刚, 王利明, *, 李凤远, 张 兵
(1. 盾构及掘进技术国家重点实验室, 河南 郑州 450001; 2. 中铁隧道局集团有限公司, 广东 广州 511458)
0 引言
近年来,西部地区高埋深长大隧道的建设方兴未艾,距离也越来越长[1-6]。在隧道修建过程中,必须处理好快速掘进与出碴进料的关系,否则将会导致修建效率低下,造成工期延误的后果[7-8]。借助特定环境条件,在长大隧道设置斜井是提供一种解决碴料快速运输的可靠方法[9]。目前,斜井碴料运输大多采用皮带机与无轨车辆相结合的方式[10]。由于斜井断面较小及皮带机的布置方式所限,往往造成斜井运输单车道多车辆行驶的情况,给现场施工车辆调度管理带来了巨大的安全隐患。
针对长距离大坡度隧道行车安全,许多专家和学者都进行了研究。如: 赵喜斌等[11]在龙岩至厦门铁路象山隧道斜井有轨运输施工中,通过运输管理实践,总结分析了有轨运输斜井溜车的各种原因,提出相应的针对性防控措施,确保了斜井有轨运输的安全; 徐正帅[12]以兰渝铁路西秦岭隧道罗家理斜井为背景,对斜井溜车主要原因进行深入分析,从防溜墩设置、道路设计、管线布置、车辆及司机管理和行车安全等5个方面的安全技术措施进行了探讨; 宿喜红[13]研究了交通隧道联动控制方案,通过交通监控系统和隧道监控系统的使用,确保了隧道运营和车辆安全行驶; 梁峻海等[14]研究了长距离大直径盾构隧道洞内单车道段车辆调度模型; 陈鹏等[15]以苏通GIL综合管廊工程为例,对长距离大直径泥水盾构隧道洞内无轨运输模型优化进行研究,为苏通GIL综合管廊工程洞内物料运输方案提供理论指导。 以上研究在隧道车辆无轨物料运输研究方面取得了一定的成果,但大部分以车辆防溜车以及理论研究和数值模拟层面入手,对隧道施工无轨运输智能避让系统研究较少。
本文针对长距离隧道幽暗湿滑环境司机视线受阻、物料运输效率低、单车道多车辆行车风险大等问题,对长距离单车道隧道无轨运输智能避让系统进行研究,以期提升物料运输速率和行车安全。
1 研发背景
随着我国隧道工程突飞猛进的发展,超长距离隧道工程施工不可避免。如: 新开工建设的川藏铁路工程,其中色季拉山隧道长度近38 km。目前施工的长距离隧道工程,多采用皮带运输机和传统的无轨运输车辆相结合的碴料运输方式。
依托工程新疆YE供水2期输水工程喀双段V标T2斜井长度为2 987 m,斜井坡度为12%(倾角6°50′34″,约6.84°),斜井断面直径为7 m,13个错车洞,间距约为200 m,内部轴向架设有风道、出碴用胶带输送机、输水管道、电力线缆、通信线缆、照明灯等设备,实际留给车辆安全行驶的有效空间仅4 m×4 m(截面尺寸),车辆运输方式只能采用单车道无轨运输。在幽暗湿滑环境下,司机通过机车灯光进行避让车操作,容易造成对向行驶避车效率低、同向跟车追尾的风险,尤其在冬季洞口水蒸气弥漫段。
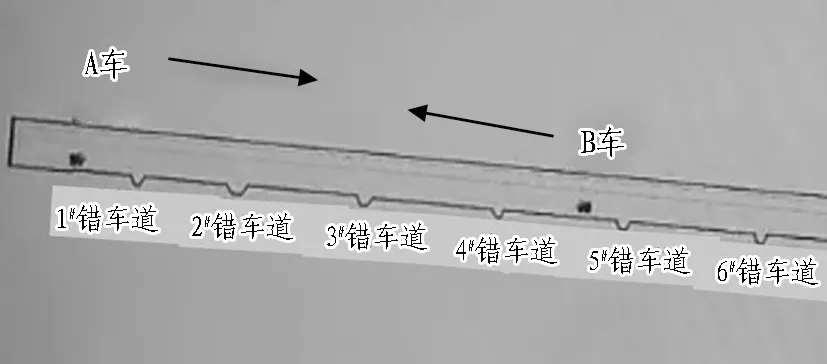
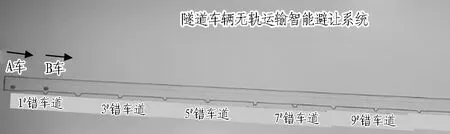
基于此,研发深埋长距离单车道隧道无轨运输智能避让系统,解决目前存在的问题,提高其工作效率,降低车辆行驶安全风险显得很有必要。单车道隧道如图1所示。

(a) 运输框架示意图

(b) 现场照片
2 系统研制
2.1 系统整体方案及工作原理
2.1.1 系统解决方案
该系统设计方案主要以实现车载终端设计和后台软件系统实现车辆定位以及会车避让的功能,应满足以下核心需求。
1)车载终端应支持数据传输和定位功能: 集成蓝牙定位、无线通信和车载语音播报功能;整套定位系统的数据交互,应支持下行数据通讯与车载终端之间的交互,完成相关下行数据的私有协议设计,协议包括【服务器↔定位基站】、【定位基站↔车载终端】。
2)根据现场提供的斜井CAD图纸,结合实际情况,可快速完成定位现场效果地图制作,地图可在一定范围内调节长宽比例,在保障定位效果的前提下,允许图纸比例失真或用分图的形式呈现。
3)避让系统数据接口可与智慧隧道施工工程大数据平台整合对接,实现定位显示终端的数据联调测试。
4)后台软件系统包括定位数据处理与避让算法实现。
长距离隧道无轨运输智能避让系统解决方案见图2。长距离隧道无轨运输智能避让系统示意见图3。

图2 长距离隧道无轨运输智能避让系统解决方案
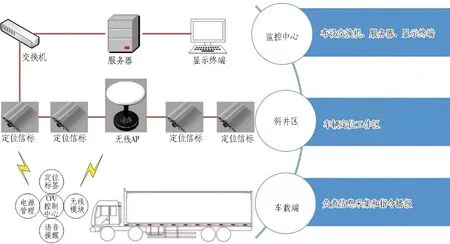
图3 长距离隧道无轨运输智能避让系统示意图
2.1.2 系统工作原理
蓝牙信标不断向外广播信标本身的相对位置信息,车载定位终端实时接收蓝牙信标广播的相对位置信息,并通过网络将车辆的定位信息发送给避让管理系统。避让管理系统通过网络通信接收车载定位终端发送的车辆定位信息,并将定位信息转换为车辆之间的运行方向和相对距离信息,结合避让管理策略,发送车辆智能避让的指令给车载终端。车载终端根据避让指令,通过语音提示司机进行避让或者通行的操作。
2.2 车载终端
按照整体方案的解决思路进行车载终端的研发工作,车载终端工作流程如图4所示。首先,打开车载终端电源开关,硬件进入初始化状态,车载终端接收信标传来的数据,进行逻辑判断,数据是否符合要求,将符合要求的数据进行整合发送到服务器,服务器进行数据处理后返回车载终端,车载终端对服务器返回的数据进行检查; 然后,基于CPU控制单元内的控制代码,根据数据指令控制车载终端的语音播报功能。具体语音播报控制部分代码如下。
if((UDP_data[6]==CAR_ID) && (UDP_data[15]== OxA5)){/**判断ID和数据正确行 */
if(UDP_data[11]== Ox01) {
voice_play(1);/** 前方会车请减速行驶 */
}else if(UDP_data[11]== Ox02) {
voice_play(2);/**前方会车请进避车洞 */
}else if(UDP_data[11]==Ox03){
voice_play(3);/**前方跟车距离200 m */
}else if(UDP_data[11]== Ox04) {
voice_play(4);/**前方跟车距离100 m */

图4 车载终端工作流程图
车载终端采用便携式设计,具体包含定位标签、语音提示单元、无线通信模块、CPU控制单元和电源(电池)管理模块。主要功能是为控制中心提供车辆位置信息,接收会车让车信息,并提示驾驶员避让、减速通过还是减速慢行。车载终端架构和实物图如图5所示。

2.3 隧道定位及应用系统
隧道定位及应用系统主要功能是运输车辆在隧道内运行时,能够提供车辆实时位置,为车辆的智能避让提供数据支持。定位系统根据功能不同划分为3个基本层次,即位置感知层、网络传输层、定位应用层。
2.3.1 位置感知层
位置感知层由定位信标组成,用于获取车辆位置的有效信息。定位信标在斜井隧道内10 m布置1个,可以实现车辆位置信息在隧道内的全覆盖。定位信标通过与车载终端的信息交互,实现车载终端在隧道内的精准定位。定位信标的现场安装如图6所示。

(a) 选位置

(b) 固定
2.3.2 网络传输层
网络传输层负责将位置感知层获得的与定位相关的信息通过有线方式和无线方式传输给后台服务器。通信网络包括定位基站和车载终端的无线方式交互,以及定位基站收到的交互数据通过有线光纤的方式传输至定位应用层。即在隧道区域布设无线定位基站AP,通过光纤连接至监控中心服务器组成环网。网络传输现场安装如图7所示。
2.3.3 定位应用层
定位应用层主要包括定位引擎、应用软件平台。定位引擎用于实时解算定位标签的位置信息,为解析车辆位置信息提供依据;应用软件平台用于实现人机交互,为用户提供各种业务功能应用,主要包括系统管理、避让管理与统计查询功能,其中系统管理可实现用户管理、角色管理和组织机构管理,避让管理可实现车载终端设备管理、车辆管理和避让规则设置,查询功能可进行车载终端的避让日志、车辆在隧道内运行工作记录以及轨迹回放的查询。定位应用层如图8所示。

(a) 光纤布设

(b) 定位基站安装

(a) 定位引擎

(b) 应用软件平台
2.4 隧道定位系统算法
隧道定位系统的核心是无线定位技术,其功能实现的路径如下: 获得位置相关的变量,建立定位数学模型,然后利用这些参数和相关的数学模型来解析坐标位置。根据测量参数的不同,隧道位置解析方法主要有信号强度法(RSSI)、角度法(AOA)、时间法(TOA/TDOA)。该系统主要运用的是信号强度法,此方法是根据在待测点接收到的信号强度值,利用信号传播模型反求距离,由至少3个参考节点间的距离就可以求出待测点的坐标。相对于AOA、TOA、TDOA这几种方式,基于信号强度的定位方法比较简单,成本较低。基于RSSI的隧道定位技术具体模型如图9所示。

图9 基于RSSI的隧道定位技术
2.5 基于现场的系统避让规则
本系统以新疆YE供水2期输水工程喀双段V标T2斜井为应用基础,为解决车辆在斜井隧道运行时的会车避让问题,首先对斜井进行区段划分,每2个避让车洞之间为1个区段。如果相向运行的2车之间只有1个完整区段时,根据避让车规则选择优先级较低的车辆进入避让区。系统设计时给出避让车规则配置界面,可以配置某类车型的优先级,从而改变避让车规则。现场车辆保障级别如表1所示。

表1 现场车辆保障级别分配表
根据斜井坡度、车辆类别等实际情况,设置如下车辆避让及同向跟车距离预报规则, 规定车辆从隧道洞口向洞内方向行驶为下行,车辆从隧道洞内向洞口方向行驶为上行。
1)A车辆保障级别(高)=B车辆保障级别时(高),上行车辆避让下行车辆(上行车辆进避车洞,下行车辆缓慢通过)。
2)A车辆保障级别(高)>B车辆保障级别时(低),A车辆缓慢通过,B车辆进避车洞。
3)A车辆保障级别(低)=B车辆保障级别时(低),上行车辆避让下行车辆(上行车辆进避车洞,下行车辆缓慢通过)。
4)A车距离前方B车200 m,A车距离前方B车50 m,进行跟车距离提醒。
2.6 智能避让系统的工作方式
基于现场隧道定位系统算法与避让规则,根据避让逻辑前置要求,1个完整的运行区间只允许存在1个车辆。系统每隔1 s触发避让算法引擎1次,首先获取当前在线设备信息,根据设备运行方向进行两两分组,分为同向行驶两两分组与相向行驶两两分组。根据车辆坐标位置信息判断获取前方避车洞坐标信息,当相向行驶的1组车辆前方避车洞是同一个避车洞时,将其加入预警序列中,根据设定距离前方避车洞30 m左右时触发预警提示,当某一车辆距离前方信号机距离≤30 m、>10 m时,并基于当前系统设置启用的避让规则,判断2个车辆哪个避让,哪个减速并通过;当1组车辆同向行驶时,计算2个车载终端的距离,当2车相距较近时,提醒后车减速慢行,避免追尾。智能避让系统工作流程如图10所示。

图10 智能避让系统工作流程
3 系统功能测试
3.1 地面100 m模拟测试
为了验证智能避车系统的功能,首先进行了地面100 m的模拟试验。通过在地面100 m的场地上布置虚拟避车洞、摆放定位信标,利用试验用车载终端,成功验证了系统功能的准确性,实现了会车功能。地面100 m模拟测试如图11所示。
3.2 地面500 m模拟测试
基于100 m距离的测试结果,以及为了验证较长距离避车系统的稳定性,在市内空旷道路上进行了500 m距离的智能避车系统的测试。本次测试完成了系统功能完整性验证,进行了车载终端定位信息采集、定位数据发送、避让管理系统定位数据的处理和展示、避让指令和语音的下发等功能的测试,系统各项功能正常,可以进行现场测试与应用。地面500 m模拟测试如图12所示。

(a) 模拟避车洞

(b) 摆放定位信标

(c) 试验用车载终端

(d) 避让提醒
4 现场应用效果
使用研发的长距离单车道隧道无轨运输智能避让系统,现场实现了隧道车辆相向行驶提前20~35 s的避让预警时间,实现了同向行驶跟车50~200 m的精确定位及防追尾提醒。自2020年6月以来,该系统平均每天可为现场提供避让车提醒19次,大大提高了现场物料运输效率和施工安全指数。现场应用效果如图13所示。

(a) 终端车内安装

(b) 路面测试场景

(a) 车载终端现场安装
(b) 相向避车提醒
(c) 同向跟车距离提醒

(d) 现场行驶画面
5 结论与建议
1)便携式车载终端,可为控制中心提供车辆位置信息,接收会车让车信息,并提示驾驶员避让、减速通过还是减速慢行。
2)具有位置感知、网络传输、定位应用功能的精准定位系统,能够提供车辆实时位置,为车辆的智能避让提供数据支持。
3)实现了长距离隧道无轨运输车辆智能交通指挥。
4)系统可实现相向行驶车辆提前20~35 s的避让预警时间,同向行驶可实现跟车50~200 m的精确定位及报告,大大提升无轨运输综合效率和行车安全。
下一步可将该系统进行更深一步的研发和升级,使该系统也能用于隧道施工有轨运输系统的控制和定位,从而提高长大隧道有轨运输的效率和行车安全。
