一种基于SFM重构点云最优抗差匹配的坝区变形监测算法
2021-07-05刘晓露
刘晓露
上海市城市建设设计研究总院(集团)有限公司,上海 浦东新区 200125
0 引言
大坝变形监测分为地表变形监测与地下变形监测两部分,一般采用TPS、GNSS技术进行地表三维位移监测,是以关键点为监测对象的监测模式,不能反映细部坝面的变形状况,而且随着部署点位的增加,监测成本也大幅度提升;地下位移监测项一般为地下水平位移和不均匀沉降,一般采用数字化的岩土类传感器进行监测,如固定测斜仪、多点位移计等。
点云式面扫描的监测技术是近年来逐渐发展起来的,如激光扫描仪、机载激光雷达、GB-SAR等。该类技术为非接触式大面积测量模式,可按照设定的测量密度进行区域扫描,获取大量的点云数据。这些技术各有优缺点,适用于不同需求,但成本普遍高昂,不适用长期连续监测,且数据处理难度较大,不易区分关键点。
无人机倾斜摄影测量是另一种近年发展起来的非接触式点云测量与空间重构技术,其基于航空摄影技术,以无人机为拍摄载体,可快速拍摄测区影像,经重建处理后可获得厘米级精度(配合GNSS差分技术)的测区点云、三维模型及纹理、正射影像图、DEM等,其成本也越来越低,已具备日常服务大坝安全监测的要求,但其技术流程稍微复杂,点云数据处理的受限数据异常,一般还需要较多的人工干预,且点云精度比激光扫描式的精度要低。
基于无人机倾斜摄影测量SFM三维重构获取点云的技术模式,结合坝体监测的特定应用场景,研究一种点云最优抗差匹配变形监测算法,旨在实现自动点云匹配,剔除异常,获取坝面变形量,对已有的关键点变形监测方法进行补充,以更全面的了解坝体变形状态。
1 最优抗差匹配的坝区变形监测算法
1.1 水利坝区环境与点云影响分析
以水利坝区为监测目标,其应用场景具有一定的特殊性。①主要监测区域为坝体,其相对其他地物较稳定,刚性较好;②周边植被多,不同季节、不同时期呈现不同状态;③周边具有大面积水域,水面一般为动态波动,光影条件复杂;④坝面有可能有短期出现的人、物,且可能为移动状态。
因此采用无人机倾斜摄影图像重建出的点云可能具有以下问题:①随机事件导致的区域异常点云,如人、车等;②周边山体风吹树动、季节差异等非钢体特性造成的点云差异;③坝面生长的低矮植被生成的干扰点云;④水面波动、倒影、反光、水位变化等导致的水面点云异常;⑤其他光影条件变化造成的空间噪点。
1.2 数据获取与点云处理整体流程
整体流程主要步骤如下:
①根据测区测量需求制定倾斜摄影航拍方案,选择合适的无人机、飞行时段,并规划航拍路线;
②执行倾斜摄影航拍方案,获取测区倾斜影像;
③采用SFM处理软件处理倾斜影像,获取测区点云、正射影像、3D模型、DEM等成果;
④如果需要统一到已知坐标系,或提高配准准确率,可人工进行标定配准,如通过差分GNSS技术确定标志性点位构建两套点云的公共点对,实现坐标系转换;文章重点研究自动化配准方法,不需此步;
⑤点云预处理:通过聚合算法剔除由随机光影因素导致的孤僻离群点云;
⑥点云粗配准:基于平面坐标先对两套点云分别进行网格分割,并计算各网格中心,再以网格中心点点集为处理对象,采用容差乱序匹配算法进行配准计算。最后根据配准差值初步判断相对稳固区域,为随后的配准计算确定初始权值。由于乱序匹配算法采用的是全枚举对比型拓扑分析,其时间复杂度高,仅适合少数据量计算;
⑦以两期全部点云为处理对象,进行抗差ICP配准计算:排除少量植被和其他因素(运动物体带来的噪点)的影响;水面3D重建异常区域的剔除;通过统计变权方法逐步迭代,逐步聚焦坝体区域的最优配准;
⑧两套点云差异比较:获取点云差异区域集合;

图1 数据获取与点云处理流程图
⑨变形区域评估:分别分析各点云差异区域,根据区域特点判别原因,如边缘明显(点云边缘梯度计算),范围小且集中的,可能为静止的附加物,如新建设的地物或临时停放的车辆、物资等,可通过图像核实排除;边缘不规则、梯度渐变的为变形的可能性较大,则作为结果输出,提醒管理人员现场测量验证。
1.3 点云粗匹配与稳固区域评估
由于ICP算法一般要求待匹配的两套点云大致对准,而两期无人机倾斜摄影获取的点云通常在z轴方向一致,在x轴方向、y轴方向和原点坐标上差异较大,因此需高效对其自动进行粗匹配。文章采用简化网格获取网格点云中心点的方法进行处理。
X=(δxδyδzδμδαδβδγ)T
=(ATPA)-1·(ATPl)
(1)
式中:δx、δy、δz、δμ、δα、δβ、δγ为7参数改正值,P为权阵,A为点对坐标构成的运算矩阵。
1.4 抗差ICP算法

(2)


(3)

2 实验分析与算法讨论
2.1 实验分析
实验以浙江某水库为例,对其进行两期倾斜摄影数据采集,由于大坝已处于稳定运营期,且两期数据采样间隔较短,因此无法直接应用测试坝体区域的变形监测算法,于是坝体部分的变形我们采用模拟的方式进行,即对后一期的点云人为改变点云数据模拟变形,以验证坝体区域变形的监测效果,但对周边植被、地物、水面的异常处理是可正常进行的。
如图2所示,左右子图分别为初始点云模型和待比较点云模型,为方便理解算法,这里用不同颜色的曲线将地物类别进行分类,其中橙色区域相对其他地物点云刚性较好,一般为变形监测区域;黄色区域的植被区,绿色区域为水面区域,点云刚性差、异常多,为文章算法配准弱化的区域。以待比较点云为例展示点云粗配准的过程,如图3所示。以平面坐标为准进行等间隔网格划分,并计算网格中心坐标,用于点云粗配准。

图2 航拍区域地物类型划分图
然后采用所有点云进行抗差最优配准,获取变形区域热力图,进而进行变形区域评估,如图4所示。

图3 粗匹配网格划分图 图4 点云比对与变形区域评估图
图中只关注了坝体区域的点云匹配,比对出1个变形区域。这个区域是为了模拟变形人为添加的点云变形。结果显示,文章算法对其给出了准确的识别。
2.2 算法复杂度分析
该算法分为点云粗匹配和抗差最优匹配两个阶段,时间复杂度均为O(n2),但在粗匹配阶段大幅简化了点云数量,在空间需求上大幅优化。因此,该算法的时间复杂度为:T(n)=O(n2)。
2.3 监测技术比较
基于无人机倾斜摄影重构点云的变形监测有其特有的优缺点,与GNSS、TPS、扫描仪、机载雷达、GBSAR等技术特点进行比较,如表1所示。
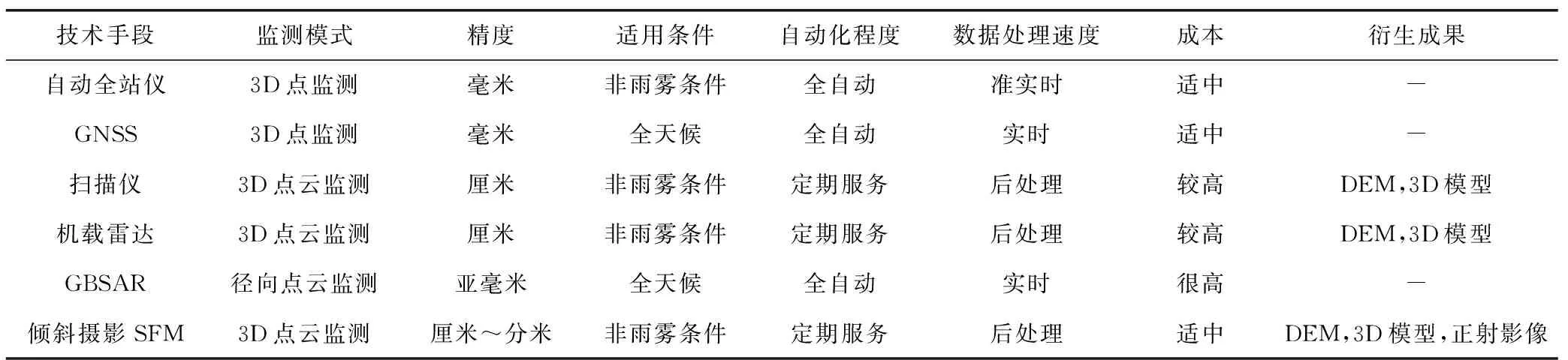
表1 不同监测技术监测比较表
3 结论与展望
阐述了坝体变形监测的技术发展及优缺点,提出了可自动配准的基于无人机倾斜摄影三维重建点云的抗差匹配变形监测数据处理算法。该模式特点如下:①航拍作业便捷,获取点云成本低,点云处理自动化程度较激光方式高;②无人机获取点云与激光方式的不同:适合野外空旷条件下获取数据,无需搬站便可获取区域全貌点云,精度比激光方式差,条件不好时可达分米级;③由于无人机SFM重构点云的精度较低,因此适合作为长期趋势性变形分析,对于符合技术监测规范精度的关键点位监测仍需使用传统方式测量,无人机点云监测是传统方式的补充,并生成比关键点测量更直观的面监测变形图;④适用于面板堆石坝等精度要求稍低、变形量大的坝体;重力坝等变形量小、精度要求高的需用激光扫描仪或全站仪的方式监测,但无人机方式可用作三维建模获取。
提升SFM重构精度的方法与多传感器监测数据融合的坝体安全评估是下一步研究方向。另外,文中提出的点云最优抗差匹配算法处理对象是点云,因此预计可以较好的移植到其他技术手段获取的点云的处理上,移植和处理效果分析也是进一步研究的内容。