基于机器视觉的机器人抓取实验系统
2021-07-04丁武臣
丁武臣
摘 要:为解决工业机器人成本高、开源性差、维护难度大的问题,本文利用机器视觉、深度学习、路径规划等技术探索机器人智能抓取实验系统设计,实现机器人智能识别、定位和抓取等功能。经验证,该系统具有灵活性好、可靠性高、易维护等优点,解决了成本高的问题。
关键词:机器人;视觉;抓取;系统设计;深度学习
ROS机器人操作系统具有开源的优势,丰富的资源为机器人开发提供了便利条件。本文借助ROS平台开发了基于机器视觉的机器人系统,对机器人进行运动路径规划,并实现对目标工件的识别与抓取。
1系统整体框架设计
机器人系统整体框架主要包括图像输入与识别定位系统、主从机控制和执行机构等[1]。机器人采用串联结构,具有6个自由度,包括5个机器人关节和一个末端夹爪,该系统利用无刷直流电机作为机械人关节的驱动机构,机器人关节驱动电机采用磁场矢量控制方法,以实现对关节角度的闭环控制。
基于ROS平台,机器人系统可以完成6自由度机械臂的求解与运动规划,并迁移至实体机器人。在目标工件识别上,利用Pytorch框架中深度学习模型,对工件图像进行处理并利用YOLOV3算法完成工件的识别与定位。
2系统设计
2.1系统硬件设计
系统的硬件设计主要为机器人关节驱动模块的设计,主要设计电机的控制驱动电路[2]。关节作为机器人系统的执行机构,需要选择合适的电机和控制策略保证机器人系统运动控制性能。本实验采用无刷直流电机作为机器人关节电机,机器人关节的直流无刷电机驱动芯片为LA6234三相驱动芯片,可以提供4 A的持续电流输出,工作电压为12~42 V。利用矢量控制方法实现机器人的平稳、柔顺控制。三相直流无刷电机采用FOC矢量控制,该控制策略经过三相电流的坐标变换,可以将电机的定子电流分解成磁场方向和转矩方向,分别实现控制,使三相无刷电机的控制具有类似于直流调速系统的动态性能。
2.2系统软件设计
机器人系统采用6自由度机械臂作为主体,通过机器视觉对目标工件进行识别,利用机械臂末端夹爪完成抓取任务。机器人系统的主要控制任务为目标工件抓取和放置的运动规划。开源机器人操作系统ROS提供了丰富的功能包,并在Moveit开发平台上进行了集成。Moveit平台具有多个移动操作的功能包,集成了运动规划、运动学求解、3D感知等诸多算法,易于使用,能够较好地支持完成本机器人系统的运动控制工作。
3控制策略设计
3.1关节闭环角度控制
机器人关节无刷电机的驱动控制在速度环控制的基础上加入角度PID控制方式,对关节角进行闭环控制以提高机器人关节的控制性能[3]。在机器人关节角度闭环控制中,通过构造节点实时监听ROS中的关节状态信息,将ROS中机械臂的实时关节状态角度作为闭环控制的输入。关节状态角度的采样频率为20 Hz,即串级PID控制器输出的周期为50 ms。关节电机角度闭环控制器可以实现机械臂关节快速跟随ROS中仿真机械臂的关节角度,实现关节角度的稳定控制。
3.2目标工件识别与定位
目标工件的识别定位采用YOLOV3算法,该过程需要训练识别目标工件的YOLOV3模型。目标工件的识别定位主要包括数据集标注、样本训练、训练结果选取和测试4个步骤。本文以滚轮轴承为待识别对象,设置训练样本数据集,成功对多个测试样本进行目标定位识别。随着样本的训练次数的增多,可以得到一系列损失率逐渐降低的结果文件,选取损失率较低的结果文件作为模型的参数导入YOLOV3模型中以实现对相机图像的识别,获取实验结果。实验结果会返回所有的目标对象和置信度,同时返回每个目标在图像中的像素坐标,利用坐标变换关系计算得出机械臂坐标系中的物体位置。YOLOV3深度学习模型对单个物体和多个物体都具有较高的识别定位速度和准确率。
3.3机器人系统运动规划与执行
机器人系统的运动规划与执行主要包括逆运动学求解和轨迹规划。机器人系统进行逆运动学求解时,输入的参数为目标工件的位姿,即位置和姿态。本文采用四元数姿态变量 Orientation 对工件位姿进行描述。机器人的运动学插件采用KDL解算器。KDL解算器可以求解封闭情况下的6轴机械臂运动学逆解。
4实验结果分析
4.1工件识别与定位分析
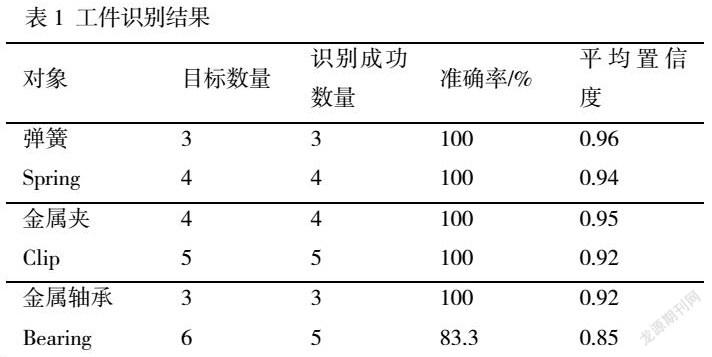
本文采用YOLOV3深度学习模型对工件进行多次识别与定位。对弹簧、家具夹和金属轴承进行识别,识别效果如表1所示,识别速度约为12~15帧/s。YOLOV3模型对不同的工件均具有较高的识别准确率和平均置信度。
实际工作环境中,由于目标工件可能存在被遮挡,光照环境变换等情况,其识别成功率置信度会受到影响。
4.2抓取实验
ROS仿真中机械臂抓取结果可以显示出逆运动学解算出的目标机械臂位姿,并将规划结果可视化。ROS系统中的机械臂模型按照规划的路径运动,同时将机械臂的关节角度通过串口实时发送至机械臂电机控制器中,实体机器人系统跟随ROS仿真中的机器人运动完成抓取任务。
多次实验结果表明,在工件定位较为准确情况下,机械臂能够很好地完成抓取任务,但是目标工件夹取的准确程度会受到目标定位误差的影响,同时机械臂末端的夹取角度也会对工件抓取的成功率造成一定影响。
5结束语
本文使用了较为简单的软硬件设计方案,利用低成本的硬件实现了基于视觉的工件抓取。该系统可以帮助学生掌握自动化、机器人、人工智能和计算机视觉相关的知识,适用于日常教学和课程实验,提升学生的动手能力和创新能力。
参考文献:
[1]孙富春.智能机器人的认知与学习[J].机器人,2019,41(5):561.
[2]占宏,李娴,杨辰光.机器人示教学习与技能泛化实验设计[J].实验技术与管理,2021,38(6):52–55,66.
[3]葛连正,赵立军.基于V-REP的機器人仿真实验系统及教学[J].实验技术与管理,2021,38(3):132–135.