仿生四足机器人的结构与步态分析*
2021-07-03徐镔滨
□ 郭 建 □ 徐镔滨
华南理工大学广州学院 机械工程学院 广州 510800
1 研究背景
仿生机器人中比较典型的有类哺乳动物四足机器人和类昆虫六足、八足机器人。四足机器人因自身具有独特的特点,一直是研究的热门,国内外学者针对四足机器人的研究取得了一系列成果。Jusufi等[1]研发了一种基于气缸驱动的四足机器人,具有触地缓冲功能和跳跃动作,能够完成对角小跑和跳跃步态。Libby等[2]研发了四足步行机器人,初步设计了步态切换,结构稳定。林阿斌等[3]研发了一种四足机器人,运动速度快,机构较为复杂,能耗低。Cham等[4]设计的四足机器人对环境具有良好的感知和适应能力,在受到侧面冲击时,能通过调整步态恢复平衡状态。徐轶群等[5]详细分析了四足机器人步态和腿机构的运动关系。王国彪等[6]按照工作环境将仿生机器人分为三类。陈佳品等[7]研发了一种四足机器人,结构简单,质量轻,体积小,灵活性高。李贻斌等[8]基于液压驱动研发了一种四足机器人,可以快速小跑,具有一定的负载能力。
为了研究四足机器人的运动学和动力学特性,笔者通过观察四足哺乳动物的身体形态和运动形态,设计了一种仿生四足机器人,单腿有三个自由度,共计十二个自由度。对仿生四足机器人进行了运动学和动力学分析、计算,通过ADAMS软件仿真,对得到的数据和计算结果进行分析,确定影响仿生四足机器人步态稳定性的原因,为仿生四足机器人物理样机的制作提供数据支持,有助于缩短研发周期,提升研发效率。
2 整体结构
仿生四足机器人的整体结构如图1所示,外形尺寸为300 mm×250 mm×263 mm,机身质量为2.5 kg。仿生四足机器人由机身结构和腿部结构两部分组成,机身结构采用铝合金材料,腿部结构主要由腰关节、髋关节、膝关节、足部组成。由舵机充当腿部结构的关节,由舵机架、腰关节支架、髋关节支架、膝关节支架充当腿部结构的肌肉骨骼。仿生四足机器人左前腿、右前腿、左后腿、右后腿结构完全一样,均匀分布安装在机架两侧。每条腿有三个舵机,用于驱动三个关节。通过控制舵机的转动,实现腿部结构的起落、前进、后退运动。仿生四足机器人的足部为平底面,有利于足部更好地与地面接触,仿生四足机器人在站立时更为平稳。行走时,仿生四足机器人通过腿部关节的转动实现直线行走、定点转弯和避障。
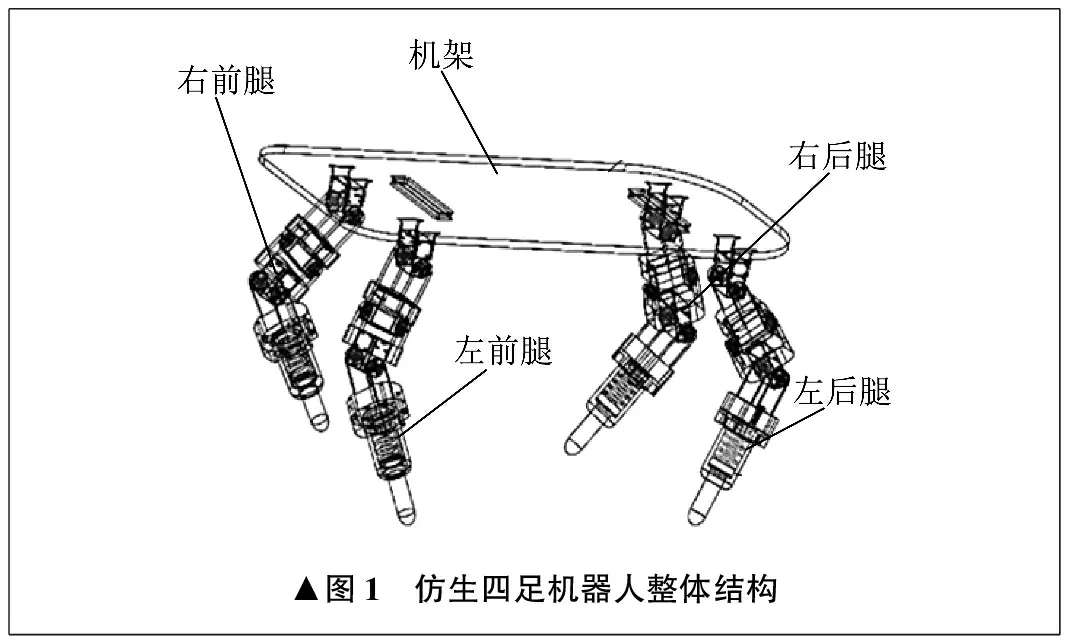
▲图1 仿生四足机器人整体结构
仿生四足机器人的单腿结构如图2所示。髋关节、膝关节、踝关节依次由一号舵机、二号舵机、三号舵机驱动。
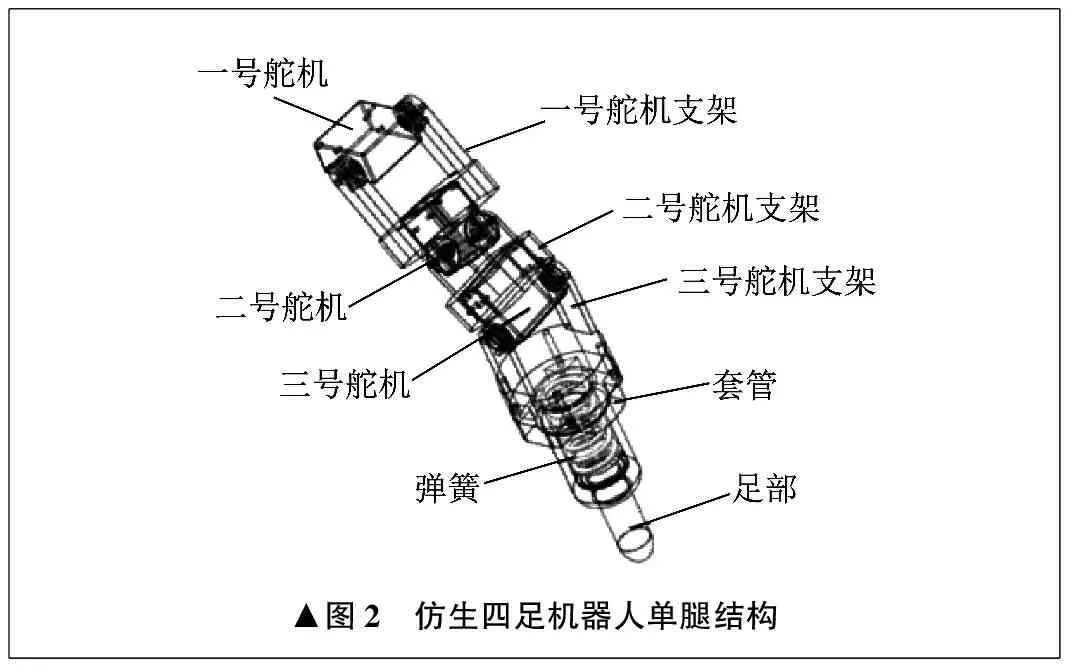
▲图2 仿生四足机器人单腿结构
3 运动学分析
仿生四足机器人腿部结构处于摆动相时,可以看作由一串转动关节连接的刚体连杆构成。基体坐标系建立在仿生四足机器人腿部侧摆转动关节轴处,X轴正向为仿生四足机器人运动方向的相反方向,Y轴方向与重力方向平行,Z轴方向用右手法则判定。利用Denavit-Hartenberg方法建立仿生四足机器人右前腿坐标系,如图3所示。θ1、θ2、θ3为各关节的转动角度变量,L1为基坐标系原点与坐标系{2}原点之间的距离,L2为坐标系{2}原点与坐标系{3}原点的距离,L3为坐标系{3}原点与坐标系{4}原点的距离,L2、L3即为大腿关节与小腿关节的等效长度。定义仿生四足机器人足端位姿为{noap},足端在基坐标系中的位置为p0=[pxpypz]T,R为足端姿态矩阵。右前腿的Denavit-Hartenberg参数见表1,αi-1为关节扭转角,ai-1为关节长度,di为关节偏距,θi为关节转动角度。
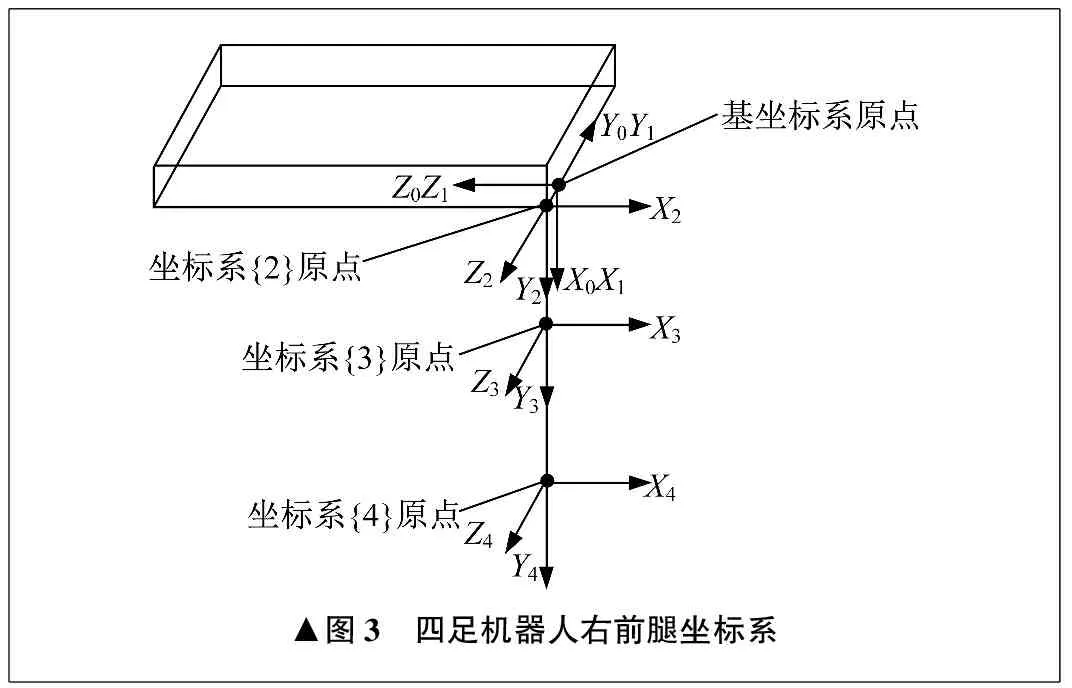
▲图3 四足机器人右前腿坐标系

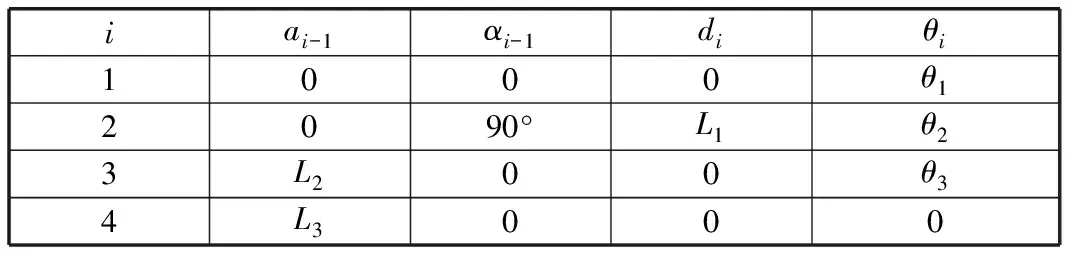
表1 仿生四足机器人右前腿Denavit-Hartenberg参数
(5)
式中:si=sinθi;ci=cosθi;sij=sinθicosθj+cosθisinθj;cij=cosθicosθj-sinθisinθj。
(6)
px=L3c1c23+L1s1+L2c2c3
(7)
py=L3s1c23-L1c1+L2s1c2
(8)
pz=L3s23+L2s2
(9)

θ1=arctan(Py/Px)
(10)
(11)
A=(pxc1+pys1)2+pz2
(12)
(13)
(14)
代入数据,可以计算出一个周期内足部端点在基坐标系中的数值。
4 步态分析
4.1 直线行走步态
仿生四足机器人直线行走采用对角步态,对角步态运动机理如图4所示。仿生四足机器人的左前腿、右前腿、左后腿、右后腿依次用LF、RF、LR、RR表示。在仿生四足机器人行走过程中,定义对角线上的两条腿是一组对角腿,LF和RR为A组对角腿,LR和RF为B组对角腿,这两组对角腿的关节摆动角度具有固定的相位关系。为了研究方便,将相位分为支撑相和摆动相。黑色方块代表摆动相腿部的抬腿,白色方块代表支撑相腿部的着地,T为周期。
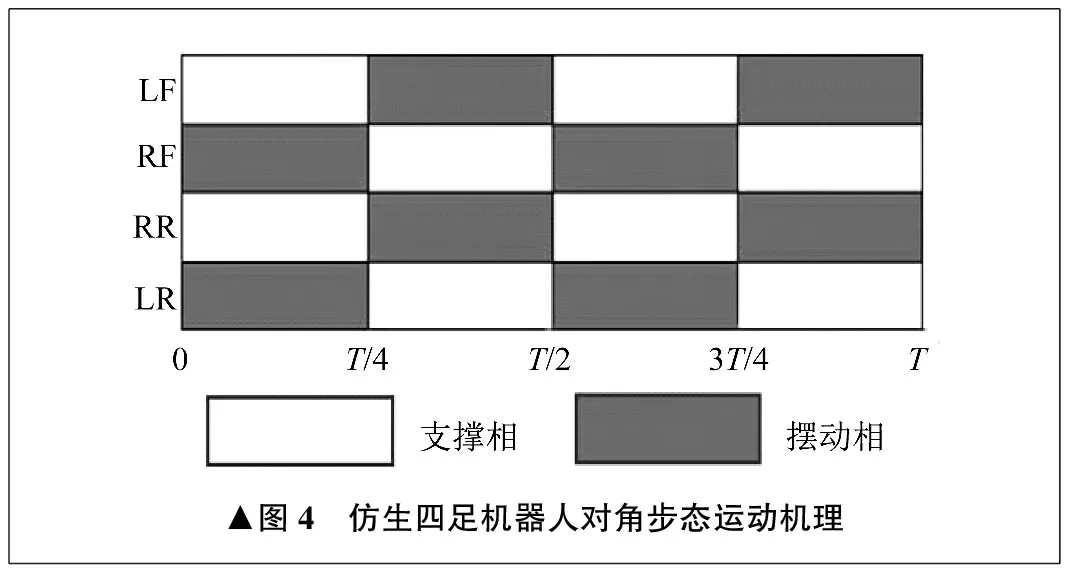
▲图4 仿生四足机器人对角步态运动机理
仿生四足机器人高姿态直线行走步态仿真如图5所示。每个步态动作的仿真时间需要0.5 s,完成一个周期高姿态直线行走步态,需要七个步态动作,所以共需要3.5 s。
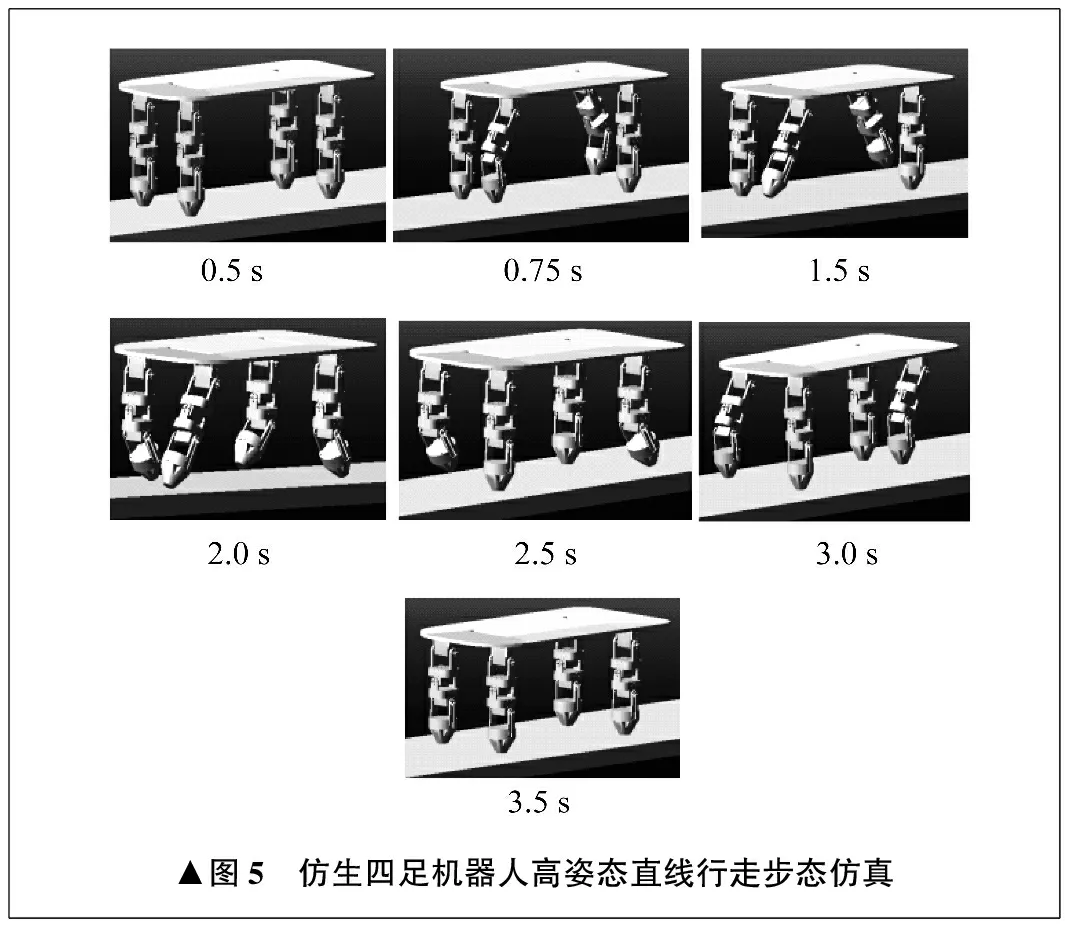
▲图5 仿生四足机器人高姿态直线行走步态仿真
采用ADAMS软件对仿生四足机器人进行高姿态直线行走步态仿真,可以得到仿生四足机器人机身质心位移变化曲线,如图6所示。在X轴方向上,初始值为-293.75 mm,终止值为-409.3 mm,可以得到仿生四足机器人完成一个周期运动的前进位移是115.55 mm,平均速度约为33 mm/s。在Y轴方向上,初始值为0,终止值为0.049 15 mm,左右偏差值为0.049 15 mm。可以看出,仿生四足机器人在直线运动时机身质心左右偏移不大,完成数个周期的高姿态直线行走步态后,仿生四足机器人机身质心不会严重偏离设定的直线轨迹,符合预期要求。在Z轴方向上,初始值和终止值为3.697 mm,最小值为-8.5 mm,最大值为4 mm,高度差值为12.5 mm,反映出仿生四足机器人在直线运动时机身整体的高度变化不大,有利于仿生四足机器人在承载物体时保持物体平衡。
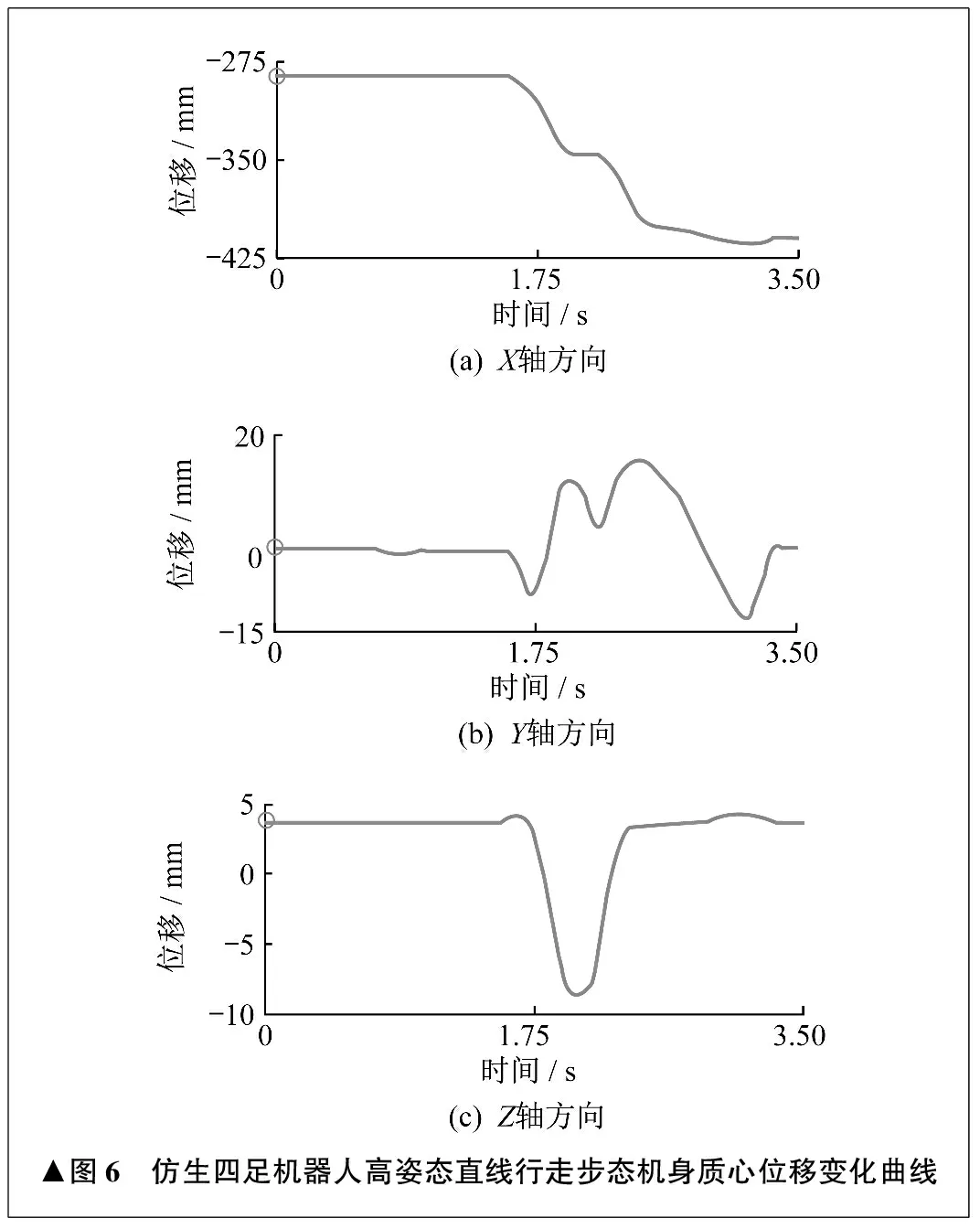
▲图6 仿生四足机器人高姿态直线行走步态机身质心位移变化曲线
仿生四足机器人低姿态直线行走步态仿真如图7所示。低姿态直线行走步态的大部分动作都与高姿态直线行走步态相似,只是开始时的站立动作不一样,总体的运动规律也相似。仿生四足机器人低姿态直线行走步态运动周期为4 s,因为在高姿态转换成低姿态的过程中添加了一个降低机身质心的步态动作。
仿生四足机器人低姿态直线行走步态机身质心位移变化曲线如图8所示。在X轴方向上,初始值为-293.75 mm,终止值为-422 mm,可以得到低姿态直线行走一个运动周期的前进位移为128.25 mm,平均速度约为32 mm/s。与高姿态直线行走步态相比,前进位移增大了,但平均速度降低了。在Y轴方向上,初始值为0,终止值为3.297 mm,仿生四足机器人直线运动时左右偏差值为3.297 mm,过程中最大值为10 mm,最小值为-30 mm,大小差值为40 mm。与高姿态直线行走步态相比,低姿态直线行走步态左右偏差值和大小差值都大一些,反映了仿生四足机器人在低姿态直线运动中机身左右摇摆的幅度相对明显,运动轨迹与设定的直线轨迹相比,会产生一定的左右偏差。在Z轴方向上,初始值为3.5 mm,终止值为-0.635 7 mm,大小差值为4.135 7 mm。与高姿态直线行走步态相比,低姿态直线行走步态的高度值小,更有利于仿生四足机器人在承载物体时保持物体平衡。
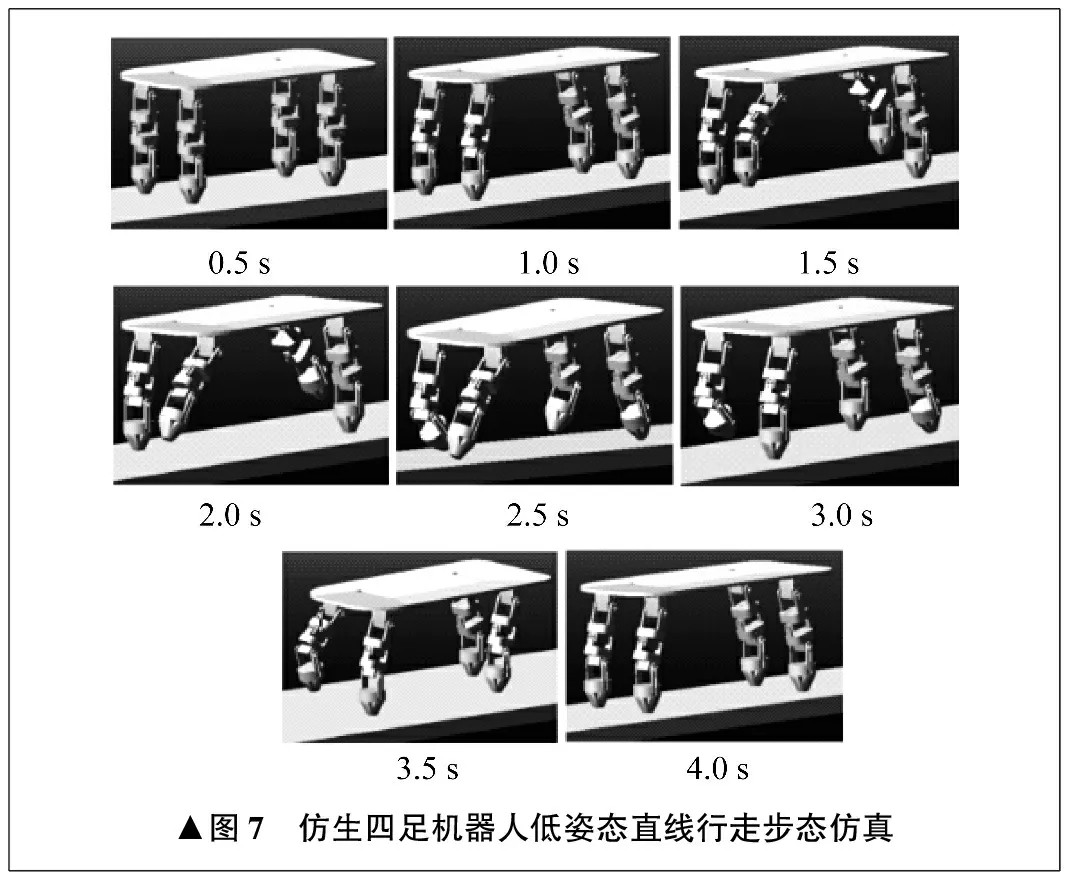
▲图7 仿生四足机器人低姿态直线行走步态仿真
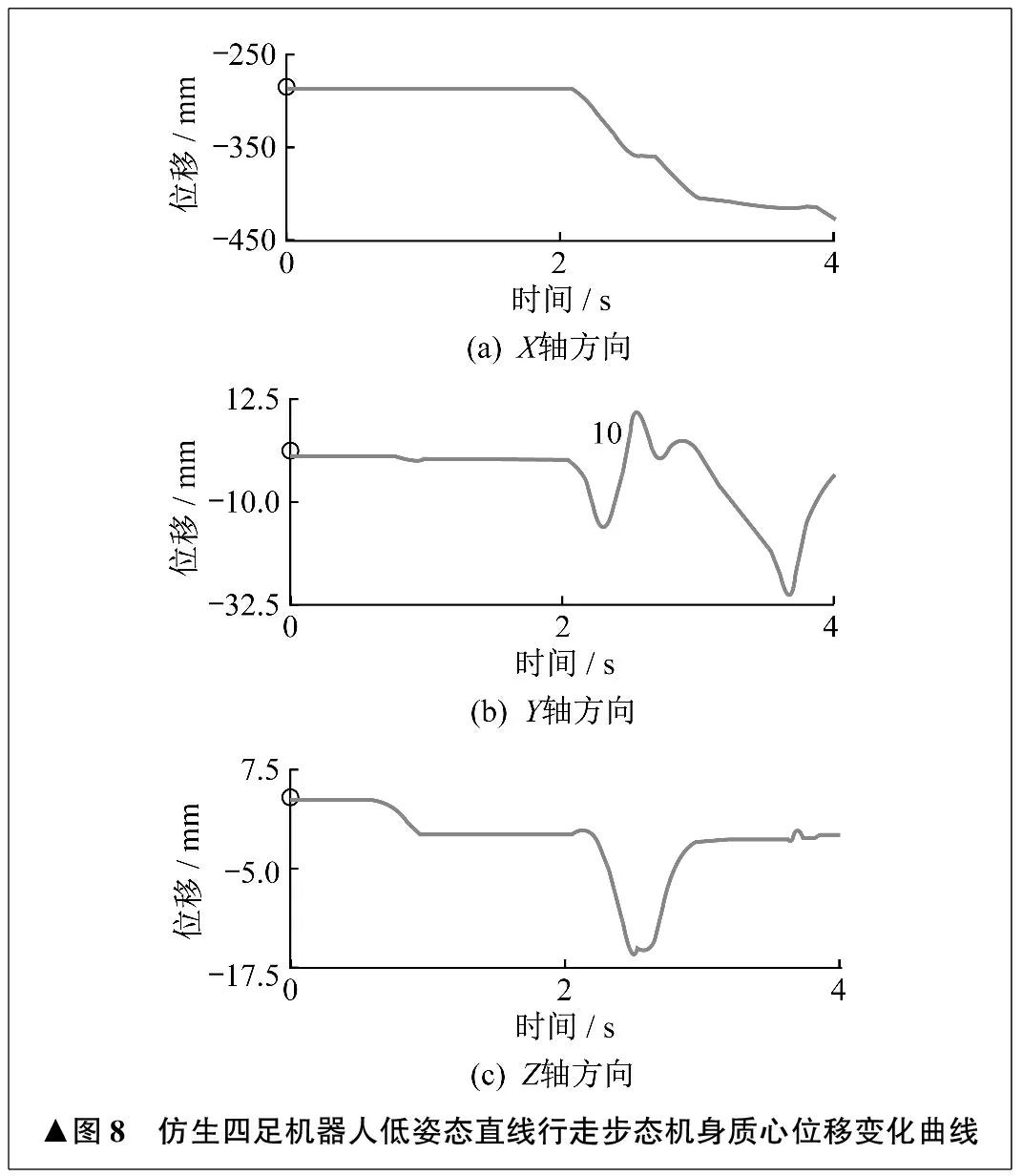
▲图8 仿生四足机器人低姿态直线行走步态机身质心位移变化曲线
4.2 定点转弯步态
转弯运动是仿生四足机器人实现自主移动和避开障碍物的重要环节,转弯步态可以分为弯道转弯和定点转弯两种。相比于弯道转弯,定点转弯具有灵活性高、周期短的优点。笔者设计的仿生四足机器人采用定点转弯步态,分为四个阶段。第一阶段,左前腿的膝关节向内侧摆动,腰关节向外侧摆动,此时机身质心向左侧偏移。第二阶段,左前腿的髋关节向左侧摆动,调整机身向左转动15°,确定足端着地位置。第三阶段,右前腿的膝关节向内侧摆动,腰关节向外侧摆动,然后髋关节向左侧摆动,使机身转动15°,调整足端着地位置。第四阶段,调整左前腿和左后腿关节的角度,使机身质心回到初始位置。
仿生四足机器人定点转弯步态仿真如图9所示。仿生四足机器人完成一个周期的定点转弯步态需要执行五个步态动作,每个步态动作完成的时间为0.5 s,因此完成一个周期的定点转弯步态需要2.5 s。
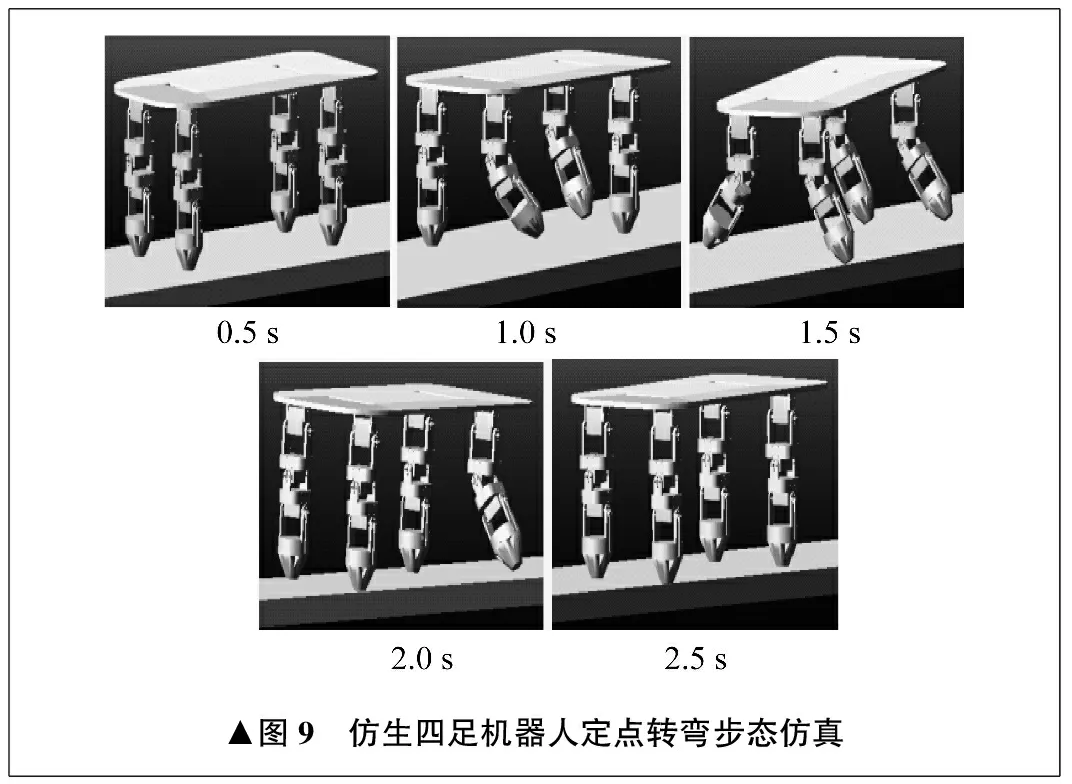
▲图9 仿生四足机器人定点转弯步态仿真
仿生四足机器人完成一个周期定点转弯步态时,角度变化如图10所示。
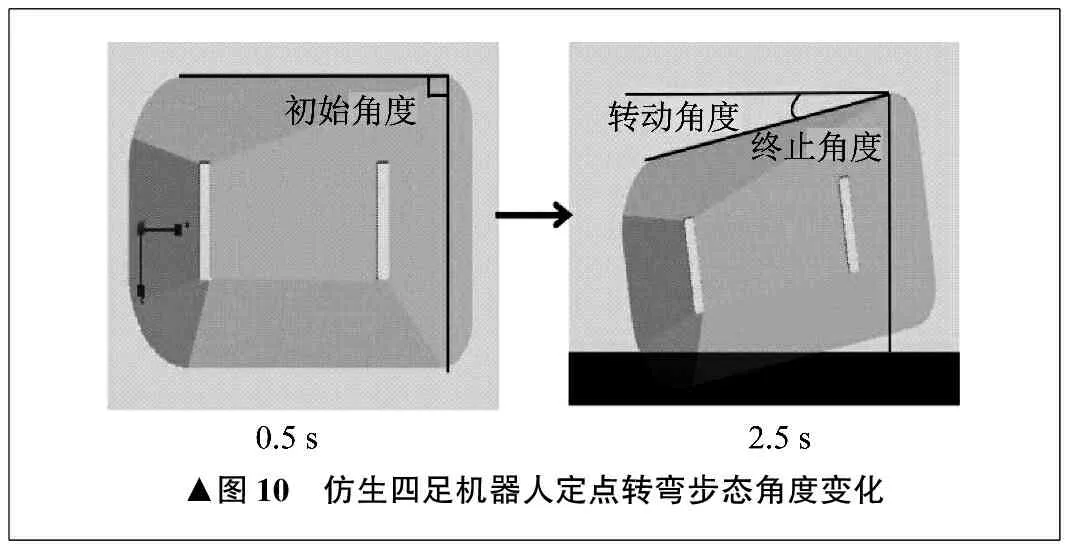
▲图10 仿生四足机器人定点转弯步态角度变化
仿生四足机器人定点转弯步态机身质心角度变化曲线如图11所示。机身质心的初始角度为91°,终止角度为79.07°,由此得到机身质心的转动角度约为12°。在完成定点转弯步态的过程中,机身质心角度的变化是波动的,在1.5~2.5 s之间,机身质心角度出现最小值,反映出转动角度的最大值出现在这个时间段,这是由于仿生四足机器人在抬腿过程中与地面产生摩擦和碰撞。
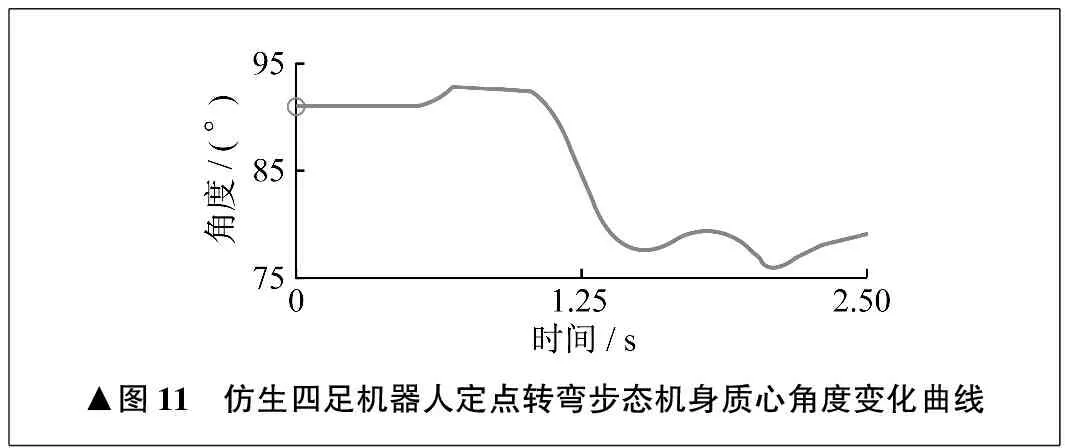
▲图11 仿生四足机器人定点转弯步态机身质心角度变化曲线
5 样机步态测试
仿生四足机器人整体步态包括高低姿态直线行走步态和定点转弯步态。在没有遇到障碍物时,执行高姿态直线行走步态。当检测到前方40 cm内存在障碍物时,执行向左侧转弯的定点转弯步态。完成每个定点转弯步态周期的角度为18°,要实现原地转弯掉头,需要执行十个定点转弯步态周期。当执行完原地转弯掉头后,仿生四足机器人执行三个周期低姿态直线行走步态,最后回到初始的高姿态直线行走步态,等待下一次避障检测。仿生四足机器人样机如图12所示。
▲图12 仿生四足机器人样机
6 结束语
采用传统的机械试验方法来设计和研究机器人时,设计周期长,成本高。笔者以四足哺乳动物为原型,设计了仿生四足机器人,同时利用ADAMS 软件进行仿真分析。
笔者介绍了仿生四足机器人的结构原理与运动机理,仿生四足机器人能够在各种地形中平稳、顺畅地运动。
对仿生四足机器人单腿进行了运动学正解和逆解计算,利用动力学方程计算了仿生四足机器人的转矩,为仿生四足机器人的稳定控制奠定了基础。
利用ADAMS软件进行了直线行走步态和定点转弯步态运动仿真,确认所设计的仿生四足机器人能够平稳地进行步态运动,顺利完成运动步态的切换。
制作了仿生四足机器人物理样机,完成了样机的高低姿态直线行走步态测试、定点转弯步态测试,测试结果符合设计要求。
