基于法向量和投影平面的点云特征提取方法
2021-07-03贾丁凡谢晓尧
贾丁凡 谢晓尧 刘 嵩
(贵州师范大学 贵州省信息与计算重点实验室, 贵阳 550001)
利用3D测量技术可以获得物体的三维表面信息。3D模型的特征提取,在数字模型的表示、理解和识别中起着重要作用[1]。点云模型特征提取关键的问题是构造特征点识别算子。目前,已经有许多学者对此进行了研究。现有的检测算法可分为2类:一是基于曲率或表面变化的检测方法。比如刘致远等人提出的地下管廊特征线提取方法[2],首先使用LiDAR获得地下管廊原始点云数据,然后利用所提算法找出含有管廊整体轮廓信息的面状点云,最后基于PCA算法,通过设定角度阈值去提取轮廓数据。二是基于法线量的检测方法。比如Wang Lihui等人提出的基于曲率和法向矢量的特征点检测方法[3],赵春海提出的基于法向量波动情况划分关键点的方法[4]。
为了提高点云特征提取的准确性和计算速度,现提出一种基于法向量和投影平面的特征提取方法。首先根据矢量分布和聚类的性质提取轮廓点,然后根据矢量偏转角和距离对特征点进行排序,从而提取点云特征。
1 特征提取方法
首先,使用加权主成分分析法(WPCA)计算法线向量,由此构建投影平面。然后,搜索检查点的最邻近点,并将它们投影到投影平面上。在检查点及其每个相邻点之间构造一个矢量,分析该点邻域的几何特性。计算矢量的方位角,并将其分布用于检测物体的边界点。最后,使用k均值聚类法对检查点的相邻单位法线向量进行聚类,并根据聚类数检测折叠点。利用两个相邻向量的偏转角和两个相邻点之间的距离,来确定点的几何顺序。三维点云模型特征提取过程如图1所示。

图1 特征提取流程
1.1 边界点的提取
使用最近邻搜索(KNNS)方法,搜索检查点P0的k个相邻点,并根据WPCA确定法线向量。法线向量垂直于投影平面。投影平面上,任意一点的坐标为(x,y,z)。将投影平面在点P0处的法线向量表示为n=(A,B,C);将检查点P0的坐标表示为(X0,Y0,Z0)。于是有:
A(x-X0)+B(y-Y0)+C(z-Z0)=0
(1)
令第j个相邻点(Xj,Yj,Zj)在投影平面上的投影点坐标为(xj,yj,zj),则相邻点与投影点的关系为:
(2)
其中,
(3)
即投影点Pj的坐标表达式如(4)。
(4)
检查点P0与第j个相邻点的投影点Pj之间的向量为:
Pj=(xj-X0,yj-Y0,zj-Z0)
(5)
为了确定由检查点和相邻点构成的矢量的方位角的分布特性,在投影平面上建立二维坐标系。将P0设置为坐标系的原点,将线段从原点延伸到投影点P1(x1,y1,z1)并形成y′轴。y′轴的形成要满足x′轴、y′轴和法线向量n之间的右手定则,即x′坐标单位矢量e1为:
(6)
使用正交关系,可通过以下公式计算y′坐标单位向量e2:
(7)
(8)
(9)

(10)
然后,通过式(11)计算相邻方位角的差。
(11)

1.2 折叠点的提取
关于图像中折叠点的提取方法,国内外诸多学者已经对其进行了研究。基于投影的提取方法,投影错误就会导致特征点检测错误。基于曲率的提取方法[5],计算曲率又需要大量时间。我们认为,可以按下述方法来提取3D折叠点。
第一,通过最近邻搜索,确定每个检查点的最近邻点。相邻的三角形,由检查点和2个最近的相邻点组成。
第二,检查点P0和最近的相邻点Pi及Pi-1形成的平面,其法线向量由式(12)确定。因此,可按式(13)得到单位法向矢量ej。
(12)
(13)
第三,采用基于最小生成树的改进法向量矢量[6]重定向的方法,来确定法向量的方向。
第四,采用k均值聚类算法对单位法向矢量进行聚类,然后根据最佳聚类数确定折叠点。当检查点在平面上时,最佳群集数为1。
第五,利用聚类有效性指数判断聚类的有效性,从而进一步确定聚类的最佳数量。
2 实验及结果分析
通过实验主要分析上述方法在ModelNet数据集上的有效性。ModelNet数据集共有662种目标分类,127 915个CAD,10类标记过方向的数据。实验在一台装有Ubuntu 18.04系统的计算机上进行,计算机的配置为:英特尔i7-6700 CPU,英伟达GTX 1080 GPU,8 GB运行内存。实验中提取的点云均使用Open3D进行可视化。
对ModelNet数据集中的凳子、书架、椅子、杯子、吉他的mesh模型,随机抽取100 000个点云,采用我们提出的方法(简称“法向量和投影平面法”)对其进行特征提取,同时也用文献[7]的“基于曲率”的方法和文献[8]的“基于法向量”的方法来进行特征提取。实验结果如图2至图6所示。相对而言,法向量和投影平面法具有更好的特征识别度,对凳子的凳脚、平面的梁,书架的整体框架、边框、藏书格子,椅子的把手、靠背,均做到了更为准确的识别和提取。对于杯子,各种算法都没有提取到杯子底座,但法向量和投影平面法提取到了杯子边缘特征。对于吉他,只有法向量和投影平面法提取到了其边缘特征。可见对生活中常见物体表面轮廓特征的提取,法向量和投影平面法有一定的优势。

图2 凳子点云特征提取的可视化效果
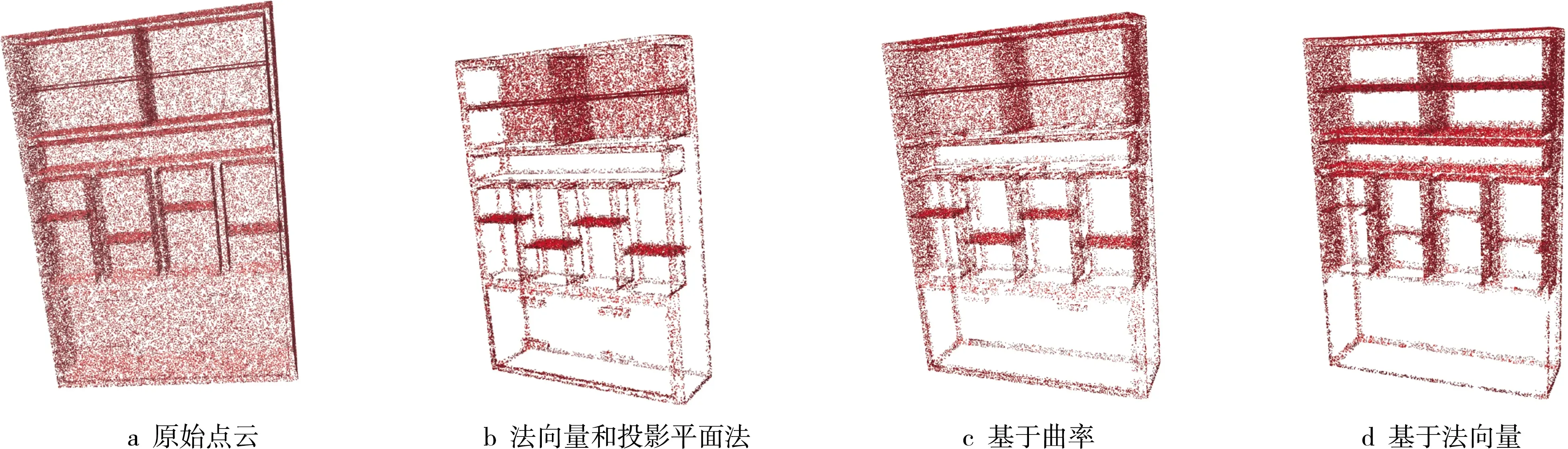
图3 书架点云特征提取的可视化效果
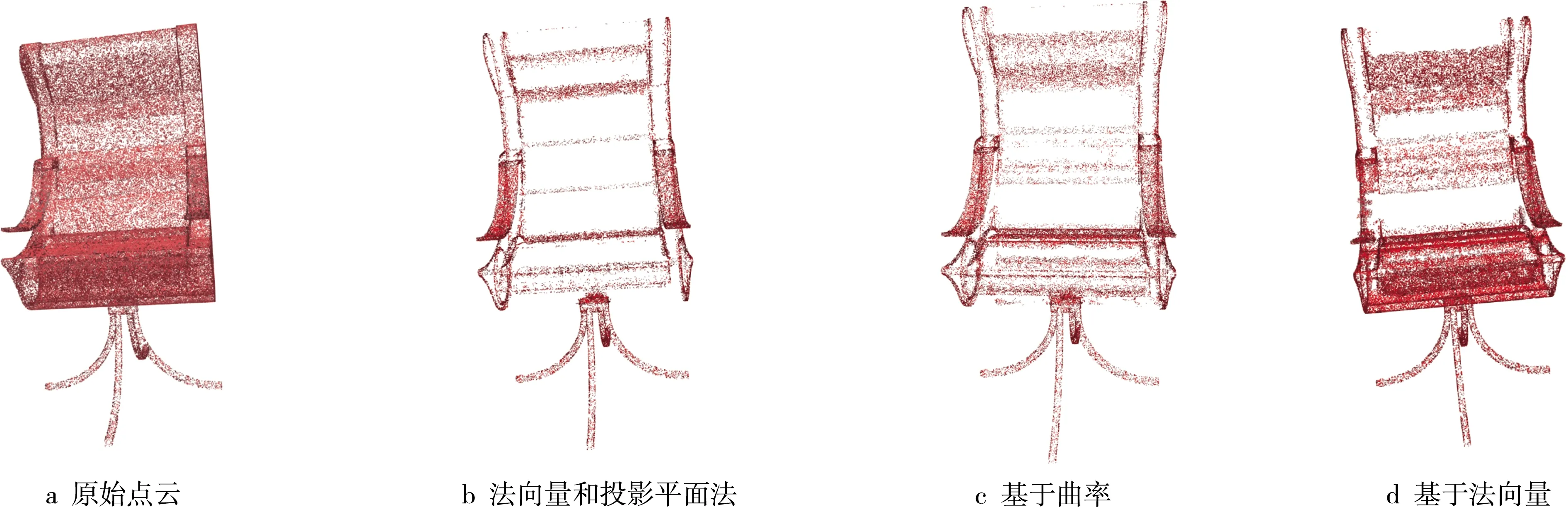
图4 椅子点云特征提取的可视化效果

图5 杯子点云特征提取的可视化效果
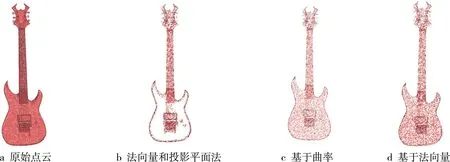
图6 吉他点云特征提取的可视化效果
在点云特征提取算法中多数是针对稀疏点云的,往往不适合百万点云以上的大规模点云。为了验证法向量和投影平面法在密集点云特征提取中的性能,我们运用三维激光扫描仪得到的佛像点云数据进行了实验。扫描得到的佛像外观表面共计有1 501 455个点。实验结果如图7所示。从图中可以看出,法向量和投影平面法对佛像的整体轮廓具有更好的特征识别度,能够提取出佛像佛光的特征。另外,从计算结果来看,采用法向量和投影平面法,提取的点云数量相对较少、运行时间较短、运算效率较高(见表1)。

图7 佛像点云特征提取的可视化效果
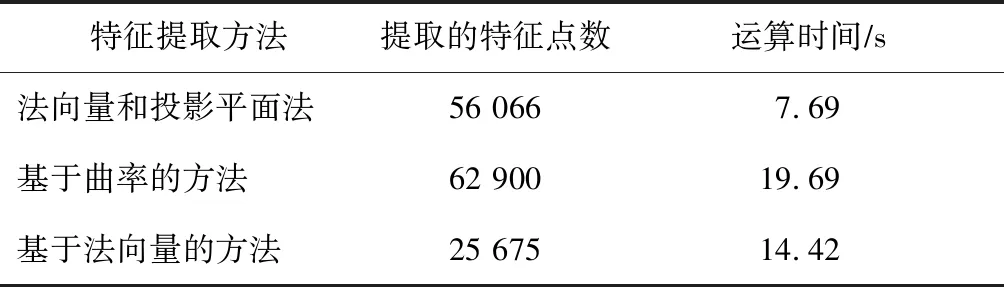
表1 计算效率对比
3 结 语
为了提高点云特征提取的准确性和运算速度,采用基于法向量和投影平面的提取方法,首先根据矢量分布和聚类的性质提取轮廓点,然后根据矢量偏转角和距离对特征点进行排序,从而提取点云特征。在ModelNet数据集上的应用结果表明,对于生活中常见物体的表面轮廓,这种方法具有较好的特征识别度;在三维激光扫描的佛像密集点云上,这种方法对佛像的整体轮廓具有相对更好的特征识别度,而且提取的点云数量相对较少、运行时间较短、运算效率较高。
