多构型上肢外骨骼与肩复合带旋转中心一致性的研究
2021-07-02杜妍辰张洪源喻洪流林俊文
杜妍辰,张洪源,喻洪流,林俊文
上海理工大学 医疗器械与食品学院(上海,200093)
0 引言
据《中国脑卒中防治报告(2018)》显示,我国40岁以上人口中脑卒中患病人数已高达1 242万人[1]。在脑卒中幸存者中,70% ~ 80% 会伴有由偏瘫引起的不同程度的上肢功能障碍[2-5]。 传统康复训练需要患者在医院或康复机构由康复医师手把手进行治疗。上肢康复训练设备的出现弥补了康复医院医师资源短缺的问题,但如今的许多康复外骨骼由于自身自由度和机构构型可能限制人体本身的运动,产生机构运动旋转中心与人体关节旋转中心不对准,在人体穿戴外骨骼运动时产生距离和角度的偏移[6-7]。上臂的自然运动与肩带的运动高度协调,以肩胛骨节律(SHR)为代表。通过肩带从胸部到肱骨的肌肉连续驱动的自然结果,将这种协调运动纳入上肢的康复过程中可能有助于取得有效的临床效果[8-10]。
通过解剖学研究可知,人体上肢是个十分复杂的系统,由肩复合带、肘部、腕手部等组成。其中肩复合带由基座胸骨、锁骨、肩胛骨、肱骨组成,由胸锁关节SG、肩锁关节AC、肩胛胸关节ST、盂肱关节GH串并联。为了令外骨骼与人体上肢尽可能实现一致性运动,需要其构型不限制人体运动,且与人体保持一致的机构自由度,但是这样的上肢外骨骼结构极为复杂,稳定性差,造价昂贵,适用性很低。因此目前的上肢外骨骼机器人大多简化了机构自由度,使用较少的自由度去拟合人体的多自由度运动一直是研究者们的追求方向。使用准确的人体上肢模型与其进行协同运动对比人体关节与机构关节的运动一致性是上肢外骨骼设计与研究的基础与重点[11-12]。
1 上肢肩复合带模型
1.1 上肢肩复合带运动配置
从运动配置而言,锁骨可视为球副SAC 和球销副SSC 联接肩胛骨和躯干(或胸骨)的中介。肩胛胸关节通过两个接触面间(肩胛下肌和前锯肌)的相对运动来实现,从而保证了肩胛骨相对躯干的平移和旋转,从运动配置上可用平移副TST1 、TST2和1 个旋转副RST 来表示肩胛骨与躯干间的自由度总和为f=3+3+1+1=9。其中连杆数目N=4,关节数目n=5,由G/K公式(1)计算肩胛骨相对自由度总和F为3。

λ在空间中取值为6,表示肩胛骨相对躯体三个方向的运动。由此简化上肢,根据光电追踪肢体实验可以看出于盂肱关节旋转中心相对躯体拥有三个方向的位置变化,通过简化为二自由度万向节U与一个移动副P表示盂肱关节在空间中的位移变化。通过确立准确且简化的人体UPS运动学模型,能够更加直观地反应肩复合带的运动情况,使用采集的人体运动参数能够使得模型的运动按照人体的实际运动路线运动,其运动情况与人体的实际运动情况相符。
1.2 上肢肩复合带运动学模型
上肢模型UPS,U模拟锁骨带动的肩胛骨内收外展,上抬下压。P模拟肱骨抬升时的锁骨旋转中心到盂肱关节的位移变化。球副S模拟盂肱关节。则上肢盂肱关节空间位置为三个变换坐标系的连乘即M=U·P·S.为盂肱关节末端位置的运动矩阵。即可定义末端运动矩阵。串联两个旋转自由度模拟肘关节、腕关节的两个旋转自由度。即手部末端的空间位置为:

2 肩复合带的运动耦合关系
人体上肢在解剖学机构上具有耦合关系,肩部各个关节之间的运动呈现一定的关联性。当肱骨抬升时,盂肱关节(CGH)的旋转中心会随之变化,在笛卡尔坐标系中的O-xyz三轴都具有关联性的偏移运动。Klopcar等[13]用在人体肩复合带黏贴标志点采用光电追踪的方法,采集多名受试者的上肢肩复合带运动数据。
锁骨在矢状面角度与冠状面角度关于盂肱关节夹角的变化关系,在单双臂模式下有不同的运动曲线。采用插值法确认拟合单双臂模式下盂肱关节的运动曲线计算单双臂函数的相似函数:使单双臂误差<5 mm,使用这条曲线作为盂肱关节变化的经验曲线。
可以计算出当肱骨抬升时,胸锁关节到盂肱关节的向量的伸长量d_SG以及盂肱关节相对基座产生的xyz方向偏移量变化:
3 上肢多种构型与肩复合带向量相似度对比
3.1 多种上肢外骨骼构型
根据准确运动学模型和人体上肢肩复合带的运动参数分析可知,上肢外骨骼的设计要尽可能地使人体达到较大的运动范围,需要自由度与构型转心拟合人体转心作为设计依据,本研究设计五种不同自由度的机构构型,3-RRR三正交转动副机构使用三个正交的旋转副机构对准肱骨无抬升时的盂肱关节旋转中心。4-RRRR四正交转动副机构采用一个旋转副对准胸锁关节旋转中心再串联三个正交的旋转中心对准盂肱关节旋转中心。5-RRRRR 万向节-三正交转动副机构使用万向节的两自由度模拟肩复合带模型锁骨角度变化。5-RRRRR-平行四边形机构-三正交转动副机构[14],使用旋转副对其胸锁关节串联水平放置平行四边形机构来补偿肱骨抬升时锁骨角度 φed和φpr的变化。5-RRRR为R-模拟移动副-三正交转动副机构,采用竖直放置的末端双臂驱动2自由度五杆机构来补偿肱骨抬升时锁骨角度变化和锁骨向量dSG变化,5-RP1'RRR机构,如图1所示。 5-RP2'RRR机构,如图2所示。
图1 5-RP1'RRR机构Fig.1 5-RP1'RRR mechanism
图2 5-RP2'RRR机构Fig.2 5-RP2'RRR mechanism
以上五种构型采用齐次旋转矩阵建模,计算从胸锁关节指向盂肱关节的SG-GH向量,对比人体肩胛带RSG-GH向量,运用向量相似性分析计算机构向量与人体向量的欧氏距离p和余弦变化cosine,分析机构与人体在配合运动过程中的偏离程度,得出优选构型。
角度偏差对比为:
RRR:42.74°>RP1RRR17.69°> RRRR:13.14≥RP2RRR:13.1°>RRRRR:3.46°
欧氏距离偏差对比为:
RRR:122.48 mm > RRRR:61.92 mm >RRRR:60.16 mm > RRRRR:57.41 mm >RRRR:28.03 mm
计算数据表明,RRR机构在肱骨运动30°时开始与人体模型发生欧氏距离偏移,当协同运动超过150°时达到122.48 mm的欧式距离偏移,对于对准盂肱关节旋转中心变化的效果最差。RRRR没有拟合dSG长度变化的移动副故产生较大欧式距离偏移。RRRRR机构与RRRR机构欧氏距离表现相似,因为多出的一个自由度用于拟合y轴距离的变化,而在肱骨抬升过程中CGH在y轴方向的偏移量较小,这一个自由度的提升达到的优化程度较小。RRRR机构由于水平放置的四连杆机构在肱骨抬升时产生不期望的y轴位移偏量,故产生较大欧式距离偏移。RRRR在人机运动过程旋转中心向量相似度最高,故拟合度较好。
在余弦变化方面,RRR机构无法拟合锁骨和肩胛骨造成的运动故运动,肱骨抬升至150°,旋转中心向量偏移角度可达42°,RRRR机构会因为人体旋转中心向量特定变化产生ed方向的抬升,但其平行四边形机构会在抬升过程中产生不期望的y轴变化,故角度变化大。由此我们可以得到最优选的构型。
3.2 工作空间验证
当人体与机构耦合运动时,因为二者向量偏移互相产生力的作用和距离限制,无法到达150°的抬升角度。本研究采用设立偏差阈值的方法,来得出不同机构间的运动空间,借以分析不同构型的奇异性和能够达到的ROM。过大的偏移会使患者不适,故使用角度偏差超过13°、欧式距离超过40 mm作为偏移距离的阈值,通过阈值建立各关节运动范围,通过各关节位移矩阵旋转矩阵变换建立机构运动学表达。使用蒙特卡洛法在空间随机50 000个点绘制不同构型运动空间。人机耦合运动空间仿真,如图3所示。
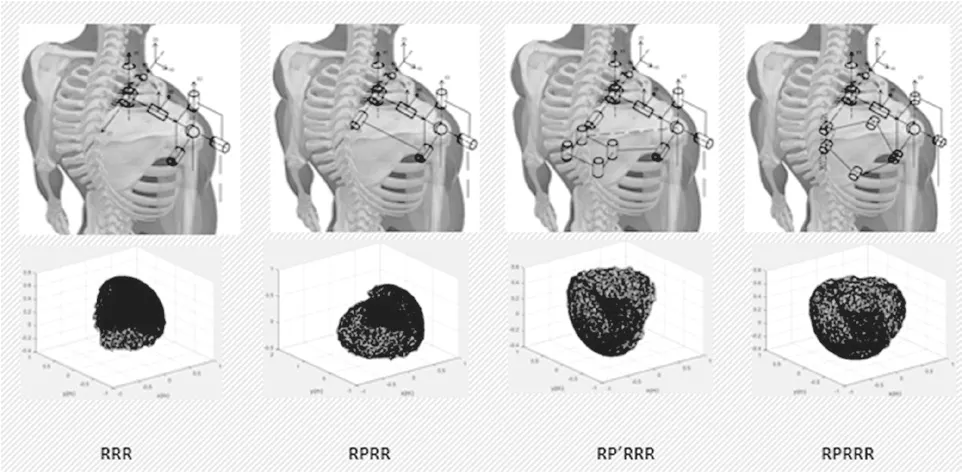
图3 人机耦合运动空间仿真Fig.3 Simulation of man machine coupling motion space
阈值范围下RRR机构限制肱骨运动角度为71°,RPRR机构限制肱骨运动为116°锁骨抬升28°。RP1'RRR限 制 肱 骨119°,锁 骨 抬 升30°。RP2'RRR机构肱骨运动150°,锁骨抬升40°。
通过对比分析可知,上肢外骨骼对于肩复合带运动限制作用在RRR机构上限制程度最大,对于RRRR机构和RP1'RRR机构有近20%的限制。上肢外骨骼优选构型RP2'RRR在奇异性对比方面表现较好,使得在人机耦合运动下拥有更好的顺应性和运动范围。
4 优选构型RP2'RRR动力学分析
通过上一章节,优选出RP2'RRR构型作为上肢外骨骼的设计,作为能够拟合dSG也可使用移动副产生单自由度运动使外骨骼的运动具有唯一性,而在实际生产中,移动副的加入使得上肢外骨骼强度下降,灵活度下降。在生产中一般使用转动副作为上肢的驱动。本章节对优选构型进行动力学分析,研究机构的速度雅克比矩阵,惯性矩阵和势能方程。确定本优选构型的驱动方式。对图4优选构型的驱动方案验证,验证单独驱动两杆件末端运动具有唯一性。
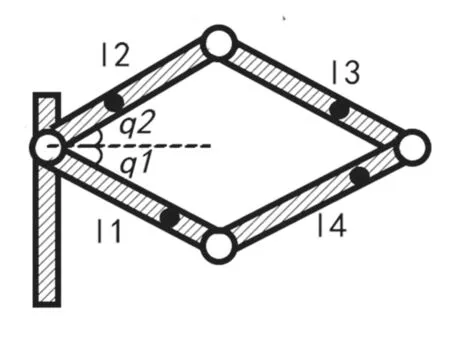
图4 RP2' 机构示意图Fig.4 RP2' Schematic diagram of mechanism
经过计算通过g1取决q1,g2取决q2。则本机构可用以下解耦方程组描述:

则当驱动杆q1与杆q2,可实现确定的运动,不会发生期望之外的运动。故优选构型RRRR能够在工程中得到较好的稳定性且运动具有确定性。
5 结论
提出了一种准确的人体上肢肩复合带建模方法,将使用光电追踪发采集的人体运动数据与上肢肩复合带模型进行匹配,得到准确的上肢肩复合带运动方式。并提出多种自由度的上肢外骨骼构型,对它们与人体肩复合带的运动相似性进行了研究,选择出合适的构型。对人机耦合运动空间进行了分析,得出了不同构型的奇异性与运动范围表现,优选出最具顺应性的构型。并且对优选出的构型进行了运动唯一性的验证,并对未来的样机加工进行了动力学驱动的指导。
