系留多旋翼无人机及其军事应用
2021-07-01张帅张鑫李志华
张帅 张鑫 李志华
摘要:为解决多旋翼无人机无法长时留空的问题,可以通过系留综合缆绳将多旋翼无人机和地面站组合起来,构成一种新型无人机系统——系留多旋翼无人机。本文梳理了多旋翼无人机的发展历程,采取对比分析的方法总结了系留多旋翼无人机的系统组成和应用特点,对多旋翼无人机在战术通信保障、军事侦察监控、电子干扰与防护3个方面的军事应用前景进行了分析。
关键词:系留多旋翼无人机;发展历程;组成;特点;军事应用
引言
当前,军用无人机的种类也越来越多,应用范围越来越广,成为不可替代的“战场新宠”。系留多旋翼无人机是一种新型的无人机系统,它解决了普通多旋翼无人机续航时间较短的问题,能够广泛应用于应急救灾、电磁监控等民用领域,同时也可以在军事领域发挥重要作用。
1多旋翼无人机的发展历程
多旋翼无人机的英文为Multirotor unmanned aerial vehicle,缩写为MUA,也称为多旋翼无人直升机,是一种没有搭载驾驶人员的旋翼飞行器,具有垂直起降、空中悬停、低空飞行和原地回转等独特飞行技能,在民用和军用市场上都大有用武之地[ 1 ]。相对于固定翼飞行器来说,多旋翼飞行器的发展经历了一个比较漫长的过程。
1.1 探索阶段:20世纪90年代初之前
在1903年莱特兄弟发明固定翼飞机后,人类就开始了对多旋翼飞行器的探索。真正意义上的第一架多旋翼飞行器来自于法国的Breguet兄弟,他们在 1907年设计了一个4旋翼飞行器原型,进行了旋翼式直升机的飞行试验[ 2 ]。而后在1921年,美国人Dr.George de Bothezat建造了一个可载3人的大型4旋翼飞行器,实现飞行距离5米、留空时间2分45秒[3]。1956年,M.K.Adman设计出一架4旋翼飞行器并试飞成功,然而由于这种飞行器在速度、载重量、续航等方面无法与传统单旋翼直升机竞争,这项研究工作再没有继续推进下去。在这一时期,多旋翼飞行器研发面临的主要问题是自动控制等相关技术的不成熟,导致多旋翼飞行器难以实现预想功能,加上基于单旋翼的带尾浆式直升机技术不断完善,使得多旋翼飞行器的研究慢慢被冷落。
1.2 起步阶段:20世纪90年代至2010年
20世纪90年代后,微机电系统(MEMS)、多旋翼动力、自动控制、非线性控制算法、传感器、陀螺、锂电池等技术的高速发展,为多旋翼飞行器奠定了技术和硬件基础。在2005年,稳定可靠的多旋翼无人机自动控制器研制成功,使得越来越多的科研机构投入到多旋翼无人机研发中。其中,德国Microdrones GmbH公司在2006年推出md4-200 4旋翼无人机,美国Spectrolutions公司也于同年推出了搭载稳定航拍视频系统的4旋翼无人机。这一时期,多旋翼无人机在突破技术瓶颈后,逐步拉开了大规模发展的序幕。
1.3 大发展阶段:2010年至今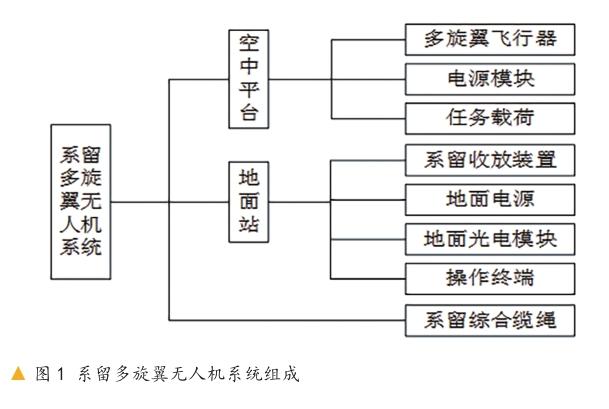
2010年,法国Parrot公司发布了4旋翼无人机AR.Drone,這款无人机操控简单,可以实现空中悬停,还能搭载相机把图像传送到手机上,在民用市场上大获成功。2013年,中国大疆公司发布精灵4旋翼无人机,相比AR.Drone,大疆的产品尺寸更大,可以有效抗风,具有内置GPS导航功能,还搭载了GoPro运动相机的连接架,使其成为“会飞的相机”。从这款产品开始,大疆的多旋翼无人机产品迅速成为世界上销量最大的4旋翼无人飞行器。此后,多旋翼无人机掀起了商业化的热潮,进入大规模快速发展期。多旋翼无人机还开始广泛应用于军事领域,其军事效用也越来越广泛,成为各国军队青睐的无人机选型。
2 系留多旋翼无人机系统组成
系留多旋翼无人机是通过系留综合缆绳将多旋翼无人机与地面设备组合起来的一种新型无人机系统,它采用地面电源直接供电,主要解决多旋翼无人机的持续供电问题,以使多旋翼无人机能够不受电能限制而长时间停留在空中。系统组成主要包括三个部分:
2.1空中平台
空中平台部分以多旋翼飞行器机体搭载电源模块、任务载荷等组成。飞行器机体可以根据所搭载负荷重量、体积等不同需求选择不同型号的多旋翼无人机,在这方面,国内外许多生产商的产品可以满足不同的订制需求,其主要功能是实现有效空中承载。电源模块替代了多旋翼无人机的电池部分,包括备用电池、机载降压/稳压电路、光电接口、交直流转换电路等,主要功能是向多旋翼无人机供电。在使用过程中,主要由地面电源实现供电,备用电池在系留线缆供电出现故障时自动切换,从而保证无人机安全返航[4]。任务载荷根据功能需求进行搭载,可搭载如侦察、监控、通信、测绘、环境监测等设备,既可以实现单一功能搭载,也可以多个功能复合搭载。
2.2 地面站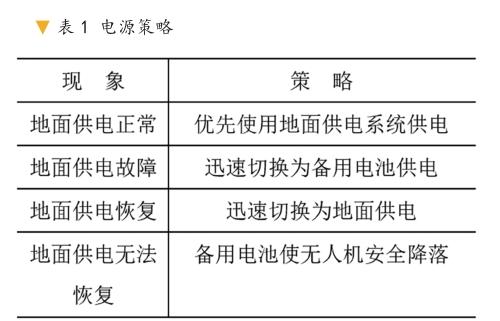
地面站由系留收放装置、地面电源、地面光电模块和操作终端组成。系留收放装置内设置有自动控制绞盘,对比无人机升空/降落速度实现对综合缆绳的自动收放。地面电源可以选择发电机、蓄电池组或者市电,向空中平台输送电力。地面光电模块包括升压模块和光电接口,升压模块主要功能是将220V交流电转换为高压电,以减少电力在综合缆绳传输中的损耗,光电接口一端连接地面电源和操作终端,另一端连接综合缆绳。操作终端用来控制多旋翼无人机飞行和任务负荷工作。整个地面站可以通过综合集成为一个地面站箱体,它既可以固定放置在底面上,也可以固定在车船等运载工具中,可以让整个系留多旋翼无人机系统满足固定和移动两种需求。
2.3 系留综合缆绳
系留综合缆绳是由地线网、高压绝缘层、通信光纤、承力缆线、外套管、强度材料和直流电源线等组成的复合光纤电缆,主要功能是连接空中平台和地面站,为空中平台持续供电,以及实现空中平台和地面站之间的数据传输。基于多旋翼无人机系统设计要求,缆绳应具有耐高压、绝缘性好、抗拉伸能力强、质量轻等特点,以减轻多旋翼无人机升力,增加升空高度,方便绞盘收放,提高使用效能。
3 系留多旋翼无人机系统特点
系留多旋翼无人机系统是在现有无人机技术基础上发展而来的,在应用层面,主要是补充、优化现有各类无人机平台的功能欠缺。因此,这里我们采用与其他无人机平台进行比较的方法来介绍系留多旋翼无人机系统的特点。
3.1 长时留空,定点悬停
普通多旋翼无人机发动机常采用电动机或燃油发动机,要依靠机载电池或者是燃油来提供动力,除了要为无人机飞行提供动力外,还需要给云台、相机等机载设备供电,这就会让普通多旋翼无人机出现续航时间短、动力不足等问题。系留多旋翼无人机采用系留综合缆绳供电方式,不必加装重量较大的电池或者燃油发动机,既减轻了无人机自身重量,还可以利用地面电源实现不间断的持续供电,保证无人机全天24小时长时间留空。相比固定翼无人机,系留多旋翼无人机还可通过惯性测量元件对三维角速度、三维加速度及三维速度的状态进行测量使多旋翼无人机进行稳定的悬停[5]。
3.2 部署方便,机动灵活
固定翼无人机一般体积较大、地面保障系统复杂、发射回收条件要求高,大型固定翼无人机则需要专门的跑道起降,而且需要协调飞行空域。系留多旋翼无人机体积小、重量轻,采用模块化、插拔式设计,整个系统可以通过普通的皮卡车、越野车进行运输,1~2人即可完成转场任务,单人徒手就可以完成部署、展开和回收等任务。加之多旋翼无人机特有的垂直起降和定点悬停等特点,降低了对场地的要求,适用于多种地形地貌环境下,如山地、丘陵、城镇、丛林等,可以实现灵活部署、快速响应等需求。
3.3 性价比高,运维简便
大中型固定翼无人机和无人直升机等空中搭载平台虽然具有负载大、飞行高、距离远等优点,但同样存在着体积庞大、系统复杂、维护保养复杂、训练成本高、起降条件要求高、操作灵活性不够、需要协调飞行空域等诸多限制因素[6]。与之相比,系留多旋翼无人机系统体积小、重量轻、设计简单,操作人员在学习2~3小时后即可上手;系统相关配件价格低廉,使得维护成本大幅降低;多旋翼无人机的升空高度一般不超过200米,且不需要特定的场地,也不需要专门协调空域,训练和使用保障要求低,便于收放使用。
当然,系留多旋翼无人机也有其固有的缺点和不足,比如:受系留综合缆绳长度限制,无人机只能在有限的高度内运动;因为载荷能力有限,无人机可搭载设备有限,对设备和系留缆绳材料的轻量化技术要求比较高;另外,地面站的接入在一定程度上也给系统的携带和运输带来不便。
4 系留多旋翼无人机系统的军事应用
系留多旋翼无人机系统因其性能特点引起各国军队注意,并研发出数十款系留多旋翼无人机,如:美军Tether Eye侦察系留无人机,该研发项目由美国打击恐怖主义技术支持办公室(CTTSO)出资支持,主要用于情报、监视、侦查以及其他安全行动;以色列悬停灯HoverLite无人机,主要用于边界监视和新闻采访[7]。就目前来看,系留多旋翼无人机的应用范围和实战能力仍需要进一步验证,但从其性能特点而言可以搭载不同功能设备实现以下军事应用:
4.1 战术通信保障
在现有战术通信保障手段中,固定翼无人机和常规多旋翼无人机均可起到空中通信中继平台的作用。然则,二者都采用无线通信方式,通信带宽有限,很难支撑现代战争对高速数据传输的要求;且都依靠自身携带电池或油机为动力来源,无法实现长时间留空,且载荷使用效率较低。系留多旋翼无人机可通过系留综合缆绳向空中平台实现24小时不间断供电,缆绳内置光纤可以实现空中平台于地面站之间的高速宽带数据传输,且系留多旋翼无人机系统具有体积小、携带方便、部署简便、机动灵活等特点,使用其作为战术通信中继平台,将大大提高战术通信保障能力。在实际应用上,系留多旋翼无人机系统可以应用于指挥所通信保障、特种作战单元通信保障、山地丛林等复杂地域通信保障等。
4.2 军事侦查监控
现阶段,国家面临的安全威胁类型越来越多,恐怖行动、边境摩擦、局部冲突等问题突出,围绕着维护国家领土、主权的行动需要我们在安保和反恐等问题上加大力度。近年来,许多国家大量运用无人装备执行类似于边境侦察和要地监控任务。对我国而言,与有关邻国因边境领土争端而产生的纠纷、对峙等问题,且陆上边境多为高寒山地地形,更加需要利用先进无人装备执行相应侦察和监控任务。将系留多旋翼无人机系统搭载雷达或光学监视设备,部署在我国陆上边境地区或重点防范区域,可以对地面和低空区域实施24小时全天候不间断的监控。同时,在具有监视功能的系留多旋翼无人机上集成搭载通信模块,可以在边境组成有效的战术通信网络,构建集监控、通信为一体的边境防护网络。甚至,还可以在系留多旋翼无人机上搭载武器系统,通过地面控制系统对目标实施精确打击。
4.3 电子干扰与防护
目前来看,由于载荷与技术限制,各国部队主要利用固定翼无人机进行电子干扰与防护,而随着多旋翼无人机发展,将可以实现搭载电子干扰与防护设备,实施固定位置区域的电子对抗行动。如:在指挥所电子防护行动中,可以利用系留多旋翼无人机系统搭载电子防护设备,对指挥所区域范围内进行电子防护;在炮兵阵地、舰船、基地等重要区域,亦可实现相应功能。
5 结束语
系留多旋翼无人机系统可以补充固定翼无人机、多旋翼无人机等无人机在军事应用上的短板,提高在战术通信、侦查监控、电子干扰与防护等方面的效费比,减轻军事人员的工作负担。而随着技术的进一步发展进步,系留多旋翼无人机系统在未来将发挥更大的军事应用价值。
参考文献
[1] 符长青,曹兵.多旋翼无人机技术基础[M].北京:清华大学出版社,2017:8.
[2] 王宇恒.多旋翼无人机的发展历程及构型分析[J].科技传播,2019(11):142.
[3] 田宇,邹春海,周正伟,周晓东.多旋翼无人机的发展及应用[J].航空模型,2016(1):80.
[4] 杨晓伟,张德磊,陈明浩.基于系留无人机的升空通信系统设计[J].现代电子工程,2017(3-4):18.
[5] 龙文彪.系留多旋翼无人机及其应用[J].科技创新导报,2020(2):57.
[6] 黄宇,吴彦锋,周镇宇.基于系留无人机平台的应急通信中继技术研究[J].数据通信,2020(2):21.
[7] 王锋,逯振坤,周国庆,佟刚,康桂文,李凯.系留多旋翼无人机技术进展及设计方法研究[J].机械工程师,2019(4):68.
(作者單位:张帅,国防大学联合作战学院;张鑫,61035部队;李志华,78156部队)
(作者简介:张帅,78156部队助理工程师,国防大学在读博士研究生)
