基于观测器的周期拒绝服务攻击网络化系统动态事件触发控制
2021-07-01张恒艳
黄 玲 郭 婧 张恒艳
(1.哈尔滨理工大学自动化学院,黑龙江哈尔滨 150080;2.黑龙江省复杂智能系统与集成重点实验室,黑龙江哈尔滨 150080;3.绥化学院电气工程学院,黑龙江绥化 152061)
1 引言
与传统的控制装置不同,网络化系统不依赖于传统的点对点连接,而是采用共享的通信设备来传输传感器和控制器数据.因此网络化系统的安装成本更低、更灵活、更易于维护[1].由于传感器、通信和计算技术的快速发展,网络化系统受到越来越多人们关注,在工业、交通和海洋等领域中应用广泛[2-4].然而,网络化系统广泛应用也带来了新的挑战,这些挑战主要体现在网络化系统有限的资源[5]和网络安全问题[6].
随着现代通信技术飞速发展,数据和信息传输需求越来越大,但系统的计算资源是有限的.针对这一问题,Jensen.M等人[7]首次提出事件触发的思想,在基于事件触发的控制策略中,仅当特定事件发生时才更新控制率,否则传输的信号将保持最新值,与传统的时间触发策略相比事件触发在一定程度节约了网络化系统的计算资源.近年来关于事件触发策略的研究十分丰富[8-10],Tabuada等人提出了一种基于状态的事件触发条件,通过持续监视状态判断是否传输.Heemels等人讨论了基于观测器的周期事件触发策略,并指出事件触发系统的性能可以任意逼近周期时间触发.Postoyan等人提出了一种基于自由选择的有限传感信息和内部变量对线性定常系统触发机制进行重新设计,提出一种具有最小执行时间的稳定性条件.在事件触发的研究中,由状态或输出构成的静态规则判断触发条件为静态事件触发.类似Postoyan等人研究的静态事件触发,需要保证存在非负的最小事件触发间隔时间避免芝诺行为.为了解决这一问题,Yue等人[11]提出了基于采样数据的事件触发策略.为了进一步节约计算资源,Girard[12]提出了一种新的事件触发机制,通过在传统事件触发中引入一个额外的内部动态变量,从而启发了动态事件触发名称.Liu等人[13]提出了一种新的动态周期事件触发策略,协同设计了触发条件的加权矩阵与控制增益.Tarbouriech等人[14]针对基于观测器的反馈控制线性系统,设计了一种基于局部信息的动态触发机制.以上研究结果表明,动态事件触发策略能达到与静态策略相同的控制性能,同时有效地减少传输次数且避免讨论芝诺行为.
在考虑网络资源有限的同时,也应该考虑网络化系统面临的安全问题[15],特别是在近几年工业开放网络受到攻击的事件频发.Foroush等人[16]研究表明网络化系统常见的安全问题为DoS攻击,这种攻击试图传输大量无效数据,故意干扰网络通信资源,通常会导致系统无法进行通信.Persis等人[17]证明了在保证系统渐近稳定的前提下,DoS攻击活跃时间平均不能超过一定的百分比,即系统所能容忍的DoS攻击存在能量和持续时间的限制,从攻击者的角度来看,DoS攻击也存在能量限制.近年来,关于事件触发的网络化系统安全性问题的研究已有一些进展[18-21].Hu等人研究了周期DoS攻击的网络系统弹性事件触发控制,将DoS攻击建模为开关信号,给出了保证闭环系统稳定时所需的控制器参数,但其研究在DoS攻击活跃期间没有控制信号,所应用的网络化系统存在一定局限.Jiang等人研究了网络化系统在DoS攻击下的稳定性问题,提出一种具有应答信号的改进事件触发机制,并建立了闭环系统的干扰周期、收敛速度和发散速度之间的关系,但其事件触发策略仅限于静态事件触发.Sun等人研究了输出反馈弹性事件触发网络化系统拒绝服务攻击,通过在静态触发条件中加入一个正项表示DoS攻击对系统的影响,指出了系统在容忍DoS攻击的同时存在一定的性能损失.Tamba等人研究了基于动态事件触发实现拒绝服务下的弹性控制,但其结果不具有LMI形式,不易直接设计控制器参数.尽管Hu等人在研究静态事件触发基础上提出了动态事件触发的DoS攻击协同设计[22],但其研究侧重在DoS攻击活跃时采用零输入策略.因此关于动态事件触发中考虑DoS攻击还没有得到充分的研究,仍具有挑战性.
基于上述内容,本文研究具有周期DoS攻击的网络化系统动态事件触发策略下基于观测器的稳定控制,将网络化系统分别在DoS攻击活跃和休眠周期建模为切换系统,并给出切换系统渐近稳定的充分条件,以及观测器、控制器和动态事件触发参数的协同设计.本文的主要贡献在于:1) 对具有DoS攻击的网络化系统,提出了观测器、控制器和动态事件触发协同设计方案;2) 采用保持输入策略补偿DoS攻击活跃期间对网络化系统的影响.
2 问题的提出
2.1 网络化系统
考虑如下网络化的线性系统:

其中:x(t)∈Rn是状态向量,u(t)∈Rm是控制输入,y(t)∈Rq是输出向量,A,B,C是合适维数的矩阵.
2.2 周期DoS攻击建模
如图1所示,考虑传感器到控制器,控制器到执行器之间存在无线通信信道,并且可能受到周期DoS攻击信号的影响,即在周期DoS攻击存在的情况下,数据既不能发送也不能接收,因此将其定义为开关信号

图1 基于观测器的周期DoS攻击网络化动态事件触发系统Fig.1 Observer-based dynamic event triggering system for periodic DoS attacks

其中:序列{nT},n ∈N表示第n-1次DoS攻击结束时刻;Toff>0表示DoS攻击休眠周期,集合[nT,nT+Toff)表示DoS攻击休眠时间间隔,T >0表示DoS攻击周期;集合[nT+Toff,nT+T)表示DoS攻击活跃时间间隔.

其中:n(t)为当前DoS 攻击正边缘触发次数,Ξ(t)为DoS攻击在当前触发次数n(t)内的持续时间.
假设1存在两个实标量ν≥0和Γ≥0对于所有t≥0满足[16]

假设2存在两个实标量ω≥0和ΓD≥0对于所有t≥0满足[16]

2.3 全维状态观测器设计
对系统(1)设计全维状态观测器
2.4 基于观测器的动态事件触发结构
在DoS攻击(2)存在的情况下,设计以下动态事件发生器决定估计状态传输时刻,
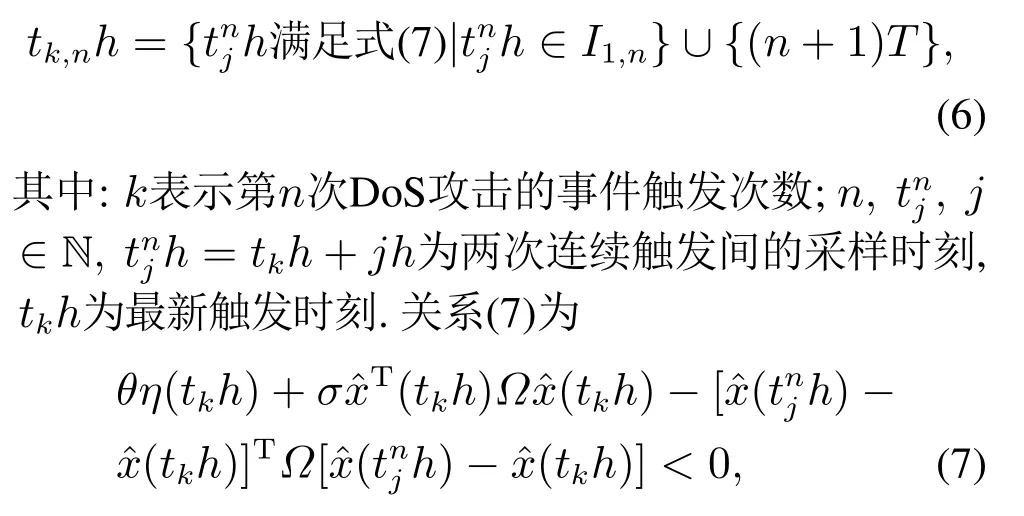
其中:θ >0,σ ∈(0,1),Ω为待设计正定对称矩阵,动态参数η(t)满足

其中:Λ是待设计的正定加权矩阵,β是K∞类函数,并满足Lipschitz连续性.
注1DoS攻击休眠起始时刻是触发时刻,在一次休眠间隔可能有多次触发,这里用k表示.


由上述推导可知,当系统遭受周期DoS攻击时,在DoS攻击休眠期间系统通过动态事件触发机制决定触发时刻,而在DoS攻击活跃期间,由于传感器到控制器通信信道和控制器到执行器通信信道受到攻击,系统不能正常触发,为了保证闭环系统的稳定性,在控制器端设置缓存器,当系统受到DoS攻击控制器不能接收最新的触发信号时,由DoS攻击休眠结束时最后一次动态事件触发状态控制,因此基于观测器的动态事件触发控制u(t)为
注3在DoS攻击活跃期间,传感器到控制器的通信信道被占用,触发信号无法传递.受Schenato[23]研究的丢包补偿策略启发,Hu等人[22]为了避免DoS攻击对传输信号影响,在DoS攻击活跃期间采用零输入补偿策略,由于零输入补偿策略对于不稳定网络化系统的DoS攻击补偿作用有限,故本文在DoS攻击活跃阶段,采用保持输入补偿策略,将最近一次成功触发状态作为DoS攻击活跃的控制信号.
2.5 基于观测器的DoS攻击网络化动态事件触发镇定控制系统建模
其中φ1(t)为x(t)在[-h,0)的补充状态.
将式(10)和式(16)代入系统(5)可得

3 主要定理及其证明






注5参考文献[18]的研究指出,给定分段L-K泛函选择参数α1,α2可以提供更多自由选择的L-K泛函,其结果的保守性可能比常见的二次L-K泛函低,但是分段的L-K泛函需要确定附加参数μ1,μ2用来估计分段L-K泛函在切换瞬间的值,根据式(37)可知需要满足μ1×μ2>1,这可能会带来系统的保守性.
4 仿真
考虑一种不稳定的间歇反应器系统[2],其系统参数如下:

给定参数ν=15,Γ=5,ω=20,ΓD=5,满足DoS假设条件,取
为了验证定理2的有效性,对由间歇反应器构成的闭环系统(19)进行仿真,如图2-7所示.
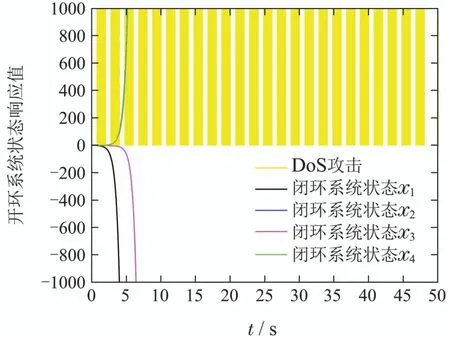
图2 开环系统状态响应Fig.2 Open loop system state response
本文所设计的动态事件触发与Hu等人[18]研究的静态事件触发仿真结果如图3-7所示.其中图2-4的DoS攻击序列满足式(3)和式(4)的限制条件.观察图2可知开环间歇反应器系统4个状态都在有限时间内发散,而图3闭环间歇反应器系统4个状态都在有限时间内收敛为零,该结果验证了定理2所设计的镇定控制器可以在系统受到周期DoS攻击时维持系统稳定,有效抵消周期DoS攻击对系统的影响.观察图5状态误差曲线在仿真4 s左右观测误差基本接近零,而图4的闭环状态响应曲线在20 s左右趋近于零,可知定理2所设计的观测器能够有效观测间歇反应器的状态.

图3 动态事件触发闭环系统状态响应Fig.3 Dynamic event triggering closed-loop system state response
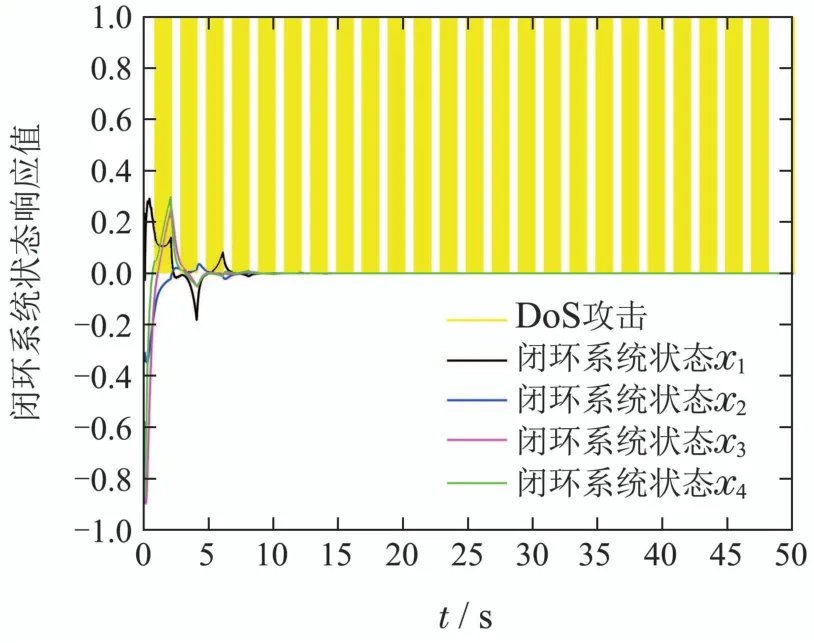
图4 静态事件触发闭环系统状态响应Fig.4 Static event triggering closed-loop system state response

图5 动态事件触发系统观测误差Fig.5 Dynamic event triggering system observation error
由于存在网络攻击,理论上多次触发有利于维持系统的稳定,即静态事件触发比动态事件触发对系统控制的稳定性表现好,由图3和图4可以看出,图4中静态事件触发控制器稳定速度确实比动态事件触发快,但是对比图6和图7,静态事件触发的次数大约是动态事件触发次数的1.5倍,尽管动态事件触发控制稳定的速度比静态事件触发慢,但是在整个仿真时段中动态事件触发通过更少的触发次数最后可以达到和静态事件触发相同的控制效果,既满足了节约网络资源,又保证了系统的稳定,同时说明了本文研究的内容的有效性.
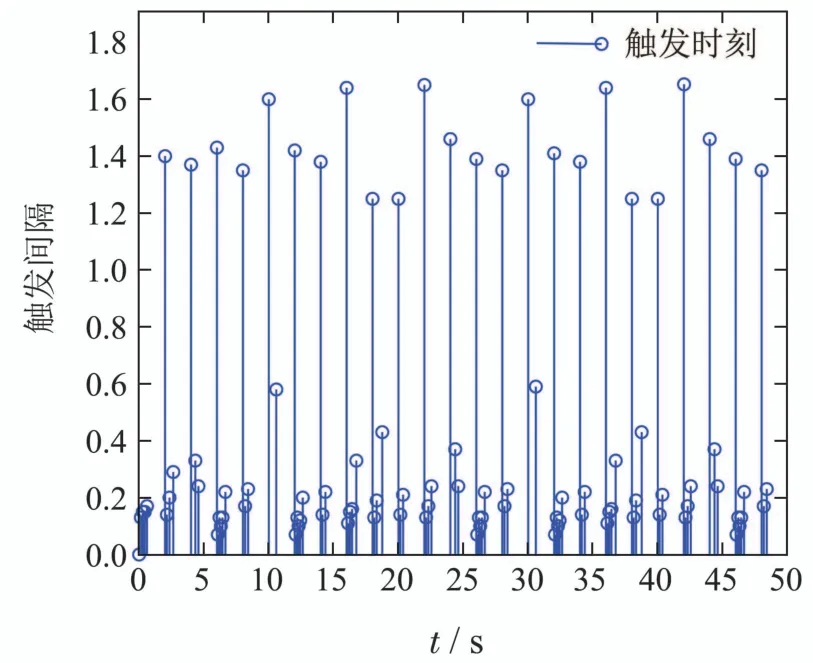
图6 动态事件触发序列Fig.6 Sequences of dynamic event triggering

图7 静态事件触发序列Fig.7 Sequences of static event triggering
5 结论与展望
本文通过动态事件触发策略研究基于观测器的周期DoS攻击网络化系统镇定控制,解决了网络化系统在传感器到控制器受到DoS攻击时,系统观测器和控制器的设计问题,通过DoS攻击的假设条件推导出系统渐近稳定时控制器存在的充分条件.与以往静态触发研究的不同,本文采用基于动态触发条件的控制策略,在保证系统稳定的前提下,减少了触发次数,节约网络资源,且在DoS攻击活跃阶段采用最后一次触发作为控制状态,实现不稳定系统在DoS攻击活跃阶段的镇定.用一个数值例子验证研究结果的有效性.
关于网络化系统的研究具有十分重要的意义和实践价值,在网络化系统资源节约和安全问题的研究中还存在一些问题有待解决,例如考虑系统可能存在故障的情况,进行故障检测滤波和动态事件触发的协同设计,在防御DoS攻击方面,考虑未知周期的DoS攻击以及讨论系统承受DoS攻击的极限.