锂电池SOC估算方法的研究*(续2)
2021-07-01孙正李军
孙正 李军
(重庆交通大学机电与车辆工程学院)

2 SOC估算
2.1 SOC的定义
电池荷电状态又称电池剩余电量,在数值上表示为电池的剩余电量与标称容量的比值[10]。其公式定义为:

式中:Qr——剩余电量,Ah;
Cn——标称容量,Ah。
2.1 SOC估算方法
现阶段SOC估算方法主要由传统方法、新型算法和机器学习算法组成。传统算法主要有安时积分法、内阻法、开路电压法和卡尔曼滤波(KF)算法;新型算法是由各类观测器[11-14]、卡尔曼滤波算法和仿生学算法进行改进所提出来的,有扩展卡尔曼滤波(EKF)算法、粒子滤波(PF)算法[15]、滑膜观测器(SMO)算法、H∞算法[16]、高斯回归方法(GPR)[17];机器学习算法主要有神经网络算法(BP)、支持向量机法[18]。针对各类算法,文章主要介绍现阶段使用较多的扩展卡尔曼滤波算法、神经网络算法、安时积分法和开路电压法:
1)安时积分法。安时积分法是通过电池充放电时,通过一段时间内经过电池电流对时间的积分,得到电池累积充入和放出的电量,进而估算出电池的SOC[19]。如式8所示。

式中:SOC0——SOC初值;
η——库伦效率;
I——充放电电流,A;
t——充放电时间,s;
Cn——标称容量,Ah。
使用安时积分法估算SOC,方法简单,计算量较小。但由于其开路特性,没有反馈环节,随着初值的误差而逐渐产生误差累计,导致其估算精度较差。现阶段单一使用安时积分法进行估算,结果可信度不高,主要是通过改进或者和其他新型算法进行联合估计SOC。文献[20]提出了带安时校正的EKF算法,该方法通过在EKF算法的估算中加入安时校正环节,并根据SOC来调整校正权重因子,提高了估算精度。
2)开路电压法。开路电压法的原理是通过电池长时间的静止,使电池内部反应达到平衡,此时电池的开路电压(OCV)就近似等于电池的端电压,进而利用OCV与SOC的关系求得SOC估计值。开路电压法,有较高的精确度,但估算时电池需要长时间的静止,不适用于动态的电动汽车中。目前,开路电压法主要应用于参数辨识中,建立OCV与SOC的函数关系,并通过试验数据拟合得到OCV-SOC曲线。
3)卡尔曼滤波算法[21]。卡尔曼滤波算法是实时递推方法,简单易行,能够有效滤除测量噪声的影响,具有良好的动态跟踪性能和鲁棒性,在SOC估算中被广泛使用[22]。KF算法的基本思想是利用信号过程与噪声状态空间的概念,估计随机线性系统状态量在最小均方根误差状态下的最优估计值[23]。KF算法主要用于线性系统中进行不断地迭代更新,但基于早期的KF算法精度较差,后期衍生出了目前使用最多的扩展卡尔曼滤波(EKF)算法。传统卡尔曼滤波算法的状态方程和测量方程如下:
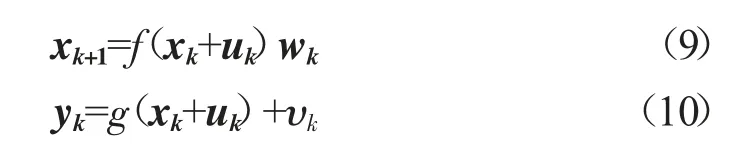
式中:xk——状态矢量;
uk——输入矢量;
yk——观测矢量。

EKF算法是在KF算法系统状态空间方程中,将模型在(xk,uk)附近进行一阶泰勒展开,通过满足的数学期望关系而进行循环递推运算。即将线性的方程改为含有非线性状态函数和状态空间方程,在非线性动态系统中能够得到更加精确的结果,从而减小开路电压的累积误差[24]。EKF算法能够将非线性滤波问题转化为近似线性滤波问题,其估算精度高,抗干扰效果好,鲁棒性好,适用于电动汽车电流剧烈变化的工况。其SOC估算的流程,如图4所示。

图4 EKF算法流程
虽然EKF算法有着较高的估算精度和鲁棒性,但其估算精度依赖于电池的模型精度,为此,随着研究的深入,又提出了无迹卡尔曼滤波(UKF)算法[25],通过无迹变换(UT),不需要求出雅克比矩阵,即简化了计算量,又减小了估算误差[26]。继而,又衍生出了自适应无迹卡尔曼滤波(AUKF)算法[27]和容积卡尔曼滤波(CKF)算法[28],SOC估算的精度和鲁棒性进一步提高了。文献[29]提出了改进分数阶的EKF算法,通过对状态预测方程进行分数阶积分来增加状态预测的全局相关性,提高了状态预测的精准度,并设计了滑窗思想的模型来减少计算量,该方法计算量较小的同时,又提高了估算精度。文献[30]结合扩展卡尔曼滤波器和滑膜观测器的优点,提出了联合扩展卡尔曼滤波的滑膜观测器算法,该联合算法针对参数扰动具有较强的鲁棒性,估算精度高。
4)神经网络(BP)算法[31]。图5为3层的神经网络结构。作为近几年算法中的热门,广泛应用于各领域中,主要因为神经网络算法的非线性强、较优的自主学习能力、估算精度高、易于在计算机中实现等优点。利用神经网络算法进行SOC估算的基本思路是,将试验数据中电池的电压、电流、温度等参数作为输入,SOC作为输出,通过误差的反向传递,不断更新各层的权值和阈值来完成训练过程,得到最优解。

图5 3层BP神经网络
为了精确求解SOC,神经网络算法的训练过程需要大量的数据来支撑,目前,神经网络算法更多地与其他算法结合在一起,来充分发挥其优点。文献[32]提出了AUKF-BP的联合估算算法,该方法既保留了UKF算法鲁棒性高和BP神经网络非线性强的优点,又避免了UKF算法不能自适应调整和BP神经网络收敛速度慢的缺点,该算法有较高鲁棒性和估算精度。文献[33]利用回溯搜索算法(BSA)对径向神经网络(RBF)进行改进,利用BSA算法求出最优解,并更新权值矩阵和阈值,用于SOC估算,把估算误差降低到2%以内。文献[34]将免疫遗传算法(IGA)与BP神经网络相结合,进行SOC的联合估计。该方法通过IGA算法对BP神经网络模型进行优化,增强了神经网络自适应学习效率,更快地进行SOC估算。文献[35]提出了将蚁群(ACO)算法与动态神经网络算法相结合,利用蚁群算法的全局寻优能力优化神经网络的权值和阈值,避免了神经网络陷入局部最优。该方法的估算精度高,泛化能力和鲁棒性好。
以上分别分析了安时积分法、开路电压法、卡尔曼滤波法以及神经网络法,现将各类SOC估算方法的特点及优缺点进行对比,如表1所示。
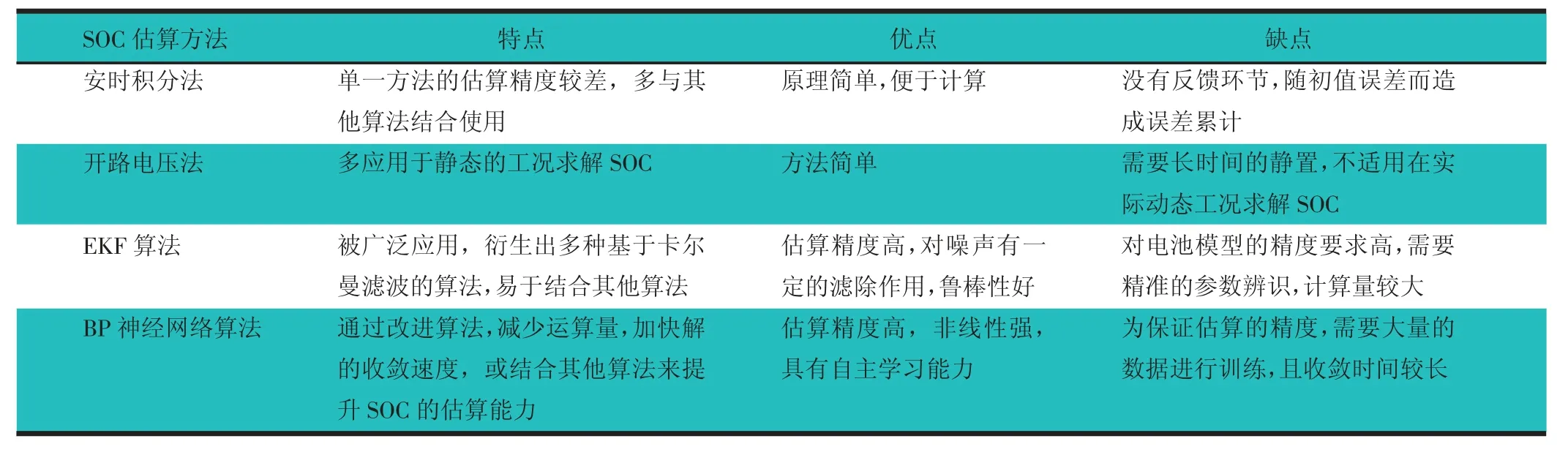
表1 SOC估算方法对比
3 结论与展望
文章从电池SOC的影响因素出发,对电池模型以及参数辨识等问题分别进行了介绍,重点对当下使用较多的SOC的估算方法进行阐述。针对SOC估算方法中尚存的一些问题提出如下建议:
1)国内大部分学者对SOC估算的研究只是通过仿真试验来验证算法的可行性,而实际车况的SOC估算仍面临其他因素的干扰,实际的估算精度和鲁棒性难免会下降。未来的研究要在仿真试验的基础上,做进一步的实车验证。
2)未来的SOC估算需要进一步地减少计算量和估算误差,做到基于初始误差的快速响应和SOC的实时评估,使未来的电动汽车电池系统更加安全、可靠。
