移动式三维激光扫描技术在矿山测量中的精度及误差分析
2021-06-30牛家宽钱小峰
牛家宽 钱小峰
(南京梅山冶金发展有限公司矿业分公司)
三维激光扫描技术又被称为实景复制技术,它是继GPS技术之后的一次测绘技术革命。由于它突破了传统测量技术单点测量的局限,采用非接触式主动测量方式,能够直接获取扫描对象的高精度三维点云数据,并实现了快速建模功能。同时它具有扫描速度快、实时性强、精度高、主动性强、全数字化等特点,能够显著地降低成本,节约时间,而且使用方便。移动扫描设备重量轻,使用便携,可适应多种作业模式,如手持、背包、车载、无人机挂载等,可以轻松扫描室内、室外及传统方式无法到达的空间,并快速建立高精度的三维模型。
基于三维激光扫描技术所具有的显著优势,研究该技术在传统矿山测量领域的推广应用非常有必要,它将彻底突破传统测量手段的局限性,对数字化矿山建设工作起到很好的推动作用。
1 移动式三维激光扫描技术的原理概述
GEO-SLAM移动式三维激光扫描仪是基于SLAM算法的移动式三维激光扫描系统,由4部分组成,即激光扫描仪、控制器、电源和数据传输线。扫描作业时,激光扫描仪360°旋转,不间断地向周围发射激光束,根据发射出去的和接收回来的激光数据,利用光速计算扫描仪和扫描目标之间的实际距离,再根据发射的激光束的水平角度和竖直角度来计算目标点的空间位置[1]。结合先进的SLAM算法,扫描仪根据实时测量计算的与周围目标物之间的距离,可以计算扫描仪与周围目标物之间的相对位置,即它不需要GPS技术就可以动态地测量和记录各种环境下的空间三维信息,相对于传统的全站仪、GPSRTK数据采集设备,其效率有数十倍的提升。
使用三维激光扫描仪每次扫描得到的三维点云数据都是以扫描仪为原点的空间直角坐标系,在使用中,通常需要将点云数据的坐标系转换为所需要的空间直角坐标系,这就需要使用测量控制点,即每次扫描时同时扫描到若干个控制点标靶球,在后期数据处理过程中,根据控制点标靶球的坐标进行坐标系转换。
2 移动三维激光扫描技术应用实例
为了全面评价和验证移动式三维激光扫描技术在地面和地下不同场景下扫描数据的精度和可靠性,选取了地面厂区三维地形扫描、矿山井下巷道实体扫描以及地面只介绍了2个案例分别进行分析。
2.1 地面厂区三维地形扫描
为了验证移动式三维扫描仪在地面三维地形测量中的数据精度的可靠性,在地面厂区范围使用移动式三维扫描仪进行快速扫描,采用闭合路线的方法,扫描路线长度约为1 km。扫描前首先在厂区范围均匀布设4个标靶球作为扫描控制点,以便于后期对点云数据进行坐标转换,进而与已有的地形图进行精度比对。然后使用移动手持扫描仪按照规划路线进行快速扫描,整个过程持续约12 min,扫描作业仅需要1人便可轻松完成,如此高的作业效率彻底颠覆了传统测量手段的作业限制。扫描完成后,用专业U盘直接插入扫描仪控制器的USB数据传输接口,自动导出点云数据,然后在室内用专业软件Geo-SLAM Hub进行点云数据预处理,处理过程耗时约30 min。最后将预处理后的点云数据导入到Trimble RealWorks软件进行专业处理,包括噪点剔除、坐标转换、点云分类、地形制图以及图形输出等操作处理,甚至也可以直接制作三维模型。点云数据如图1所示,作业流程如图2所示,标靶球点云拟合球体见图3。图3属于井下,即2.2中内容。



2.2 矿山井下巷道实体三维扫描
矿山井下巷道掘进是采矿生产的前道工序,巷道掘进施工质量对后续的回采中深孔设计以及回采爆破有着至关重要的影响。而详细、真实地测量巷道实体并建立模型是回采中深孔设计的主要依据,也是数字化矿山建设提出的工作要求[2]。要想真实反映出井下的巷道实际情况,移动式激光扫描技术无疑是最佳的选择,它以每秒几十万甚至上百万个点云数据的扫描速度,可以快速、高效、详实地测量巷道的每一处细节变化。为了检验移动式三维激光扫描技术在矿山井下扫描数据的精度和可靠性,选择了某铁矿-366 m水平6-7联北2至北10段的区域作为试验区,扫描总长度约为480 m的闭合线路。
工作流程与地面扫描类似,区别之处在于标靶球的设置方式不同。由于矿山井下测量控制点均布置在巷道顶板,因此标靶球是悬挂在控制点下的,如图3所示。扫描得到的点云数据如图4所示。使用专业软件依次对点云数据进行预处理、降噪处理、坐标转换、构建三角网、模型输出[3],流程如图5所示。
3 不同应用场景下的扫描精度评定
3.1 地面三维地形扫描数据精度分析
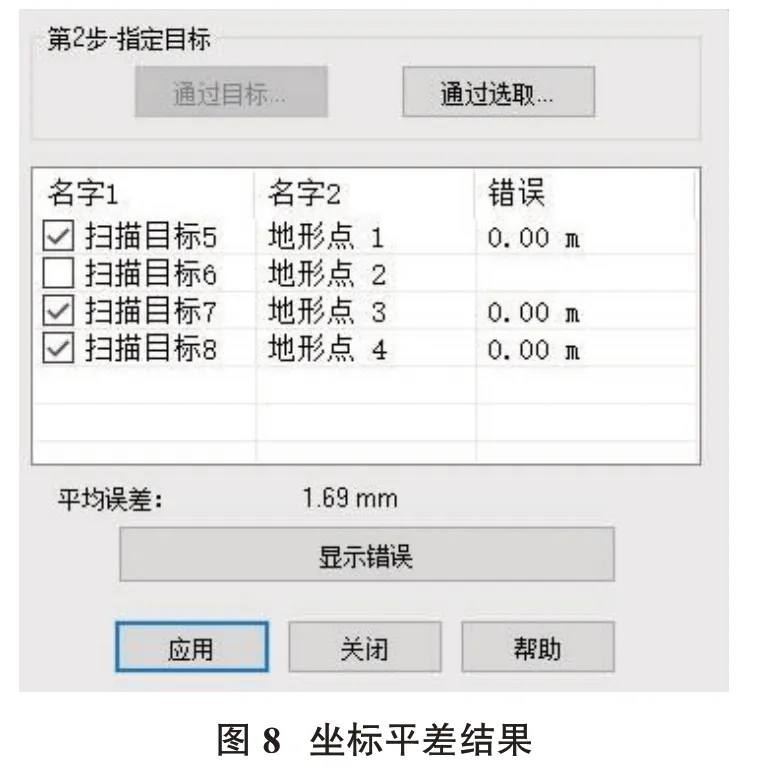
使用Trimble RealWorks软件对三维点云数据进行降噪处理,即去除无用的散点数据。然后利用软件中的目标分析器工具选取标靶球点云数据,并根据标靶球的直径(0.14 m)自动拟合球体,软件即可自动计算拟合球体球心的假定坐标,如图6所示。待所有的控制点目标靶球拟合完毕后,把控制点的绝对坐标匹配给对应的球心假定坐标,如图7所示,即可完成所需要的坐标转换。坐标自动转换过程的控制点平差结果如图8所示,平均误差为1.69 mm。




虽然控制点平差结果精度很高,但是还需要在坐标转换后的点云数据中量取若干个特征点的坐标,与GPS-RTK现场测量的坐标数据进行比对,结果如表1所示。平面位置中误差最大为53 mm,高程中误差最大为31 mm,因此移动式三维激光扫描仪在对地面特征点比较明显的小范围、地形平坦区域进行三维扫描的精度可以满足城市大比例尺地形图的修测要求。

?
3.2 井下巷道三维扫描数据精度分析
在对巷道三维点云数据进行处理后,对标靶球的球心坐标进行坐标匹配,如图9所示。选取北部和南部共3个控制点进行平差,平差结果为139 mm,如图10所示。

利用软件的建模工具构建三角网,生成实体模型,然后在模型上均匀地量取若干个特征点的三维坐标,并现场用全站仪测量该特征点,进行数据比对,比对结果如表2所示。
通过数据比对可知,在矿山井下利用移动式三维激光扫描仪扫描的点云数据在精度上要比在地面扫描得到的点云数据精度低。但是井下巷道平面中误差最大90 mm,高程中误差最大66 mm的精度已经能够完全满足矿山的生产设计要求,相比传统的测量方法,精度有显著提高。而且利用移动三维激光扫描技术,不仅作业效率更高,人力成本更低,在测量一些危险区域时,人员不必靠近就可以完成扫描工作,作业安全度也得到了保障。


?
4 点云数据误差来源分析
三维扫描点云数据的误差主要来源于4个方面:一是仪器本身的误差,二是扫描环境的影响,三是扫描的方式产生的误差,四是标靶球控制点的精度影响。
4.1 仪器本身的误差
仪器本身存在的误差,一方面是仪器制造的精度误差,会存在激光测距误差和测角度误差[4]。另一方面与点云算法有关,使用的移动式三维激光扫描仪采用SLAM算法原理,即同步定位与建图,其最早出现在智能机器人领域,用于解决机器人在未知环境中运动时的定位与地图构建问题。运用SLMA算法,若要数据精度很高,对处理器和传感器的要求很高,数据处理复杂、速度慢,而为了实现便携、高效的快速扫描,势必就要损失部分精度。
4.2 扫描环境的影响
使用SLMA算法的移动式三维激光扫描仪在扫描过程中产生的点云数据自动计算并拼接,但是其定位精度取决于周边环境的特征形态[5]。扫描环境中扫描对象的特征点多且分布均匀,扫描精度相对较高,例如地面小区楼房的扫描。反之,如果扫描对象的特征点少且不明显,整个环境中的对象特征相似,那么扫描精度就会相对较低,例如矿山井下巷道的扫描。
4.3 扫描的方式方法的影响
三维扫描的方式方法也会对点云数据精度产生不同影响。经过试验,使用SLAM移动式三维激光扫描仪进行三维扫描时,一是扫描路线要闭合,可以提高扫描数据的拼接精度;二是一次扫描范围不能太大,否则影响数据精度。扫描矿山井下巷道的路线最好控制在500 m内,扫描地面三维空间控制在1 000 m内,可以保证数据的点位中误差在50 mm内。
4.4 标靶球控制点精度的影响
标靶球控制点的坐标精度对点云数据的坐标转换起着决定性的影响,所以首先要保证所使用的控制点的精度。其次,标靶球布设的不合理也会对扫描数据精度产生影响,一般要求在扫描作业范围内均匀布设标靶球。
5 结论与建议
经过实践论证,移动式三维激光扫描技术具有实时、快速、高精度的优势,很有必要在矿山测量中尽快推广应用,对矿山数字化建设将起到重要的推动作用。移动式三维激光扫描技术不仅能够满足一般的大比例尺地形图的局部修测要求,也能够满足矿山井下巷道实体测量、采空区测量、溜井测量、专业管线测量以及开采进度测量、矿堆体积测量等[6]。但是使用SLAM移动式三维激光扫描仪单次扫描的范围具有限制性,如果要保证高精度,地面扫描路线限制在1 000 m以内,井下扫描路线要控制在500 m以内,同时要保证有足够的均匀布设的标靶球控制点,即可保证点云数据的精度满足要求。