基于三维激光扫描技术的渭源灞陵桥建模初探*
2021-06-29李志强刘建国李宏伟
山 岚,李志强,马 铭,刘建国,李宏伟
(甘肃交通职业技术学院,甘肃 兰州730070)
甘肃省渭源灞陵桥是一座古典纯木结构卧式悬壁拱桥,俗称“卧桥”。因桥身拱起,宛如长虹,久负盛名,有“渭水长虹”之称。平桥始建于明洪武年间,“既济行人,复通车马”,后遇洪水屡毁屡修。1919年仿兰州卧桥于南门外建成纯木悬臂式拱桥,后兰州“握桥”被毁,灞陵桥于是独立。灞陵桥桥身全长40米,跨度29.5米,高15.4米,宽4.8米,为全国独一无二的纯木质伸臂叠梁拱桥,其所具有的高超建构艺术和科学价值在中国乃至世界桥梁技术史上有着重要的承上启下作用,茅以升对渭源灞陵桥的评价仅次于河北赵州同济桥。2006年6月,渭源灞陵桥被列为国务院公布的第六批国家重点文物保护单位。本文以渭源灞陵桥为例,结合测绘行业新技术——三维激光扫描技术,对该古建筑实施外业扫描,进行点云数据的获取,并在内业实施三维建模。
1 运用三维激光扫描技术的价值
古建筑测绘是进行古建筑修缮、保护和管理的基础。传统的测量数据获取方式是利用直尺、垂球等工具,人工量取古建筑及其构件的尺寸。因渭源灞陵桥年代久远,古桥部分木质结构又存在变形,现已禁止通行,渭源县政府结合灞陵桥公园予以保护与利用。三维激光扫描技术则采用非接触的测量方式,在古建筑数据采集工作中能快速获取古建筑精度很高的点云数据(数据包含被测物体的三维几何信息,即最为原始的测量数据),改革了传统的人工野外手工测量方式,外业工作合理设站,扫描安全性高、效率高、灵活性好;内业工作对点云数据的处理精度高、速度快、后期利用度高。结合本研究对象,最终能对扫描的古桥进行1∶1的三维实景建模,是古建筑研究、保护、利用和修缮中一种有利与可靠的方法。
2 三维激光扫描技术的运用基础
2.1 设备基础
本研究采用徕卡RTC360三维激光扫描仪远距离进行数据获取,该设备较之天宝TX5扫描仪在扫描精度与扫描速度上有着显著提升。RTC360体型小巧,便捷高效,搭配VIS视觉追踪技术,在外业扫描过程中通过视觉追踪可实时自动计算各站间距,实现点云数据的自动拼接,更有利于对本项目古桥建筑信息的采集。
2.2 软件基础
内业数据处理及数据应用软件主要分为建模软件、AutoCAD绘图软件等。本研究主要利用第三方建模软件(如3DMax、Revit、ContextCapture等),依托RTC360自带的插件,可以快速读取外业获得的点云数据,支持建模软件快速调取点云并进行建模:利用CloudWorX插件在主流建模软件下调用Cyclone引擎将完整的点云数据加载到软件中,可以进行三维建模工作。
3 三维激光扫描技术的应用实施
3.1 外业数据采集
3.1.1 扫描站点布设
对灞陵桥进行实地调研分析后,在古桥周围平地布设控制点,在桥身两岸前后左右共计9个方位进行设站,各站点在进行布设时考虑到相邻站点的通视性、各站点之间的互补性、所有站点的覆盖全面性等多方要素。外业数据采集依托黑白标靶来实现绝对坐标的配准和点云坐标系统修正,徕卡智能点云处理后软件对各类标靶有着优秀的拟合算法,可将标靶中心精准呈现。
3.1.2 三维激光扫描
对各站点实施扫描的过程中,尽量避免周围行人走动的干扰。扫描设备调整至200万点/秒的扫描速率,单站扫描26秒,以最佳130米的测程进行测量。系统集成了1200万像素,3个相机共4.32亿的全景像素彩色相机,最终得到精细的照片级三维彩色影像。扫描分辨率设置考虑到灞陵桥各细部构建,将分辨率设为12mm低分辨率。
3.2 内业数据处理
外业扫描结束后,依次进行点云数据预览、拼接、精度检查等工作。就当前的数据处理软件情况来看,在点云数据处理环节已较为成熟,操作相对简单,一定程度上满足了本项目的实施要求。
3.2.1 点云预览
将设备扫描所得的数据转存导到徕卡点云处理软件Cyclone中进行数据处理。在点云处理软件Cyclone中创建一个数据库,来进行数据导入后的点云数据预览。
3.2.2 点云拼接
设备RTC360拥有VIS视觉追踪系统,可以实现点云自动拼接,因此,数据在导入过程中也进行着点云拼接的流程。数据导入完成后,得到一幅拼接完整的点云数据图,点云导入后选择Register进行优化,外业扫描所得的灞陵古桥点云数据如图1所示。
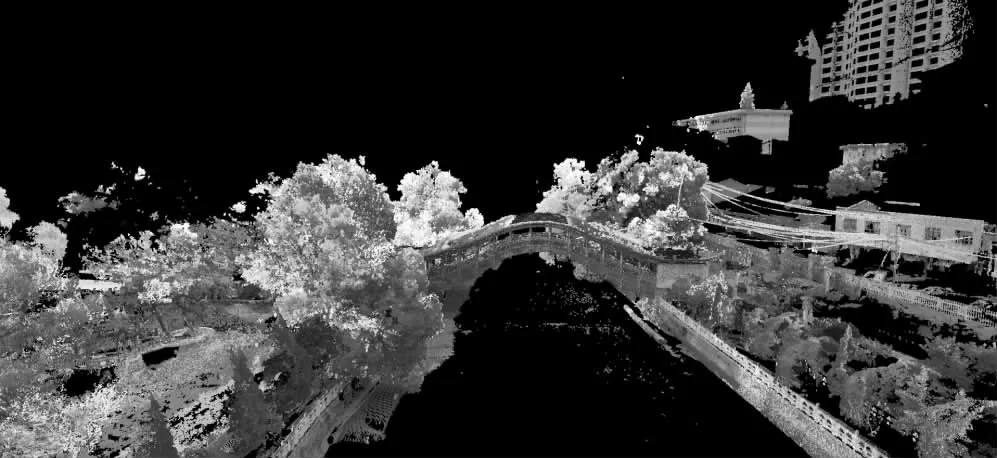
图1 渭源灞陵桥三维激光扫描后彩色点云数据图
3.2.3 精度检查
点云整体拼接完成之后需要对其进行拼接精度检查,初始数据整体的拼接精度都应保持在项目允许的范围之内,以保证在后期数据使用过程中的相对精度。精度检查有以下两种流程:
(1)目视检查
通过预览拼接好的点云数据,对其进行整体的、细致的目视检查,通过目视观察,检查在点云数据中是否存在拼接问题,如明显可见的错层、错位等。
(2)精度表检查
在目视检查结束后,再通过点云数据的拼接精度表对拼接精度进行检查,对误差较大的测站链接进行重新检查拼接,确保无误后将数据生成整体数据。如图2所示。

图2 渭源灞陵桥点云数据精度表图
3.2.4 点云去噪
三维激光扫描仪在对古桥进行外业数据采集时,以130米测程进行数据扫描与采集,所得的点云会将古桥本体及周边环境囊括其中,受周围行人、树木等影响而出现噪点,这些都是不属于古桥本身数据的部分。为保证后期对古桥进行三维建模时数据的真实有效性,既要提高点云数据的精度,还要做好对点云数据去噪等方面工作的处理。点云数据去噪是在内业数据处理中人工将整体数据中影响后期数据处理和进一步数据利用噪点数据进行剔除和处理的工作流程,主要工作为大范围去噪与精细化去噪,如图3、图4所示。

图3 渭源灞陵桥点云数据大范围去噪示例图
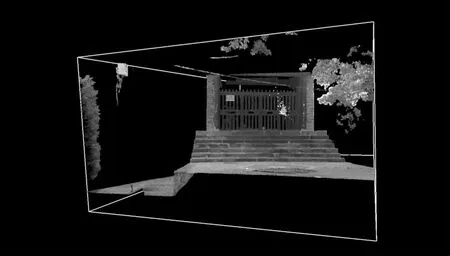
图4 渭源灞陵桥点云数据精细化去噪示例图
3.3 构建古桥三维模型
以上主要数据处理工作结束后可将古桥点云数据进行输出,利用第三方建模软件进行古桥三维模型的构建。依托RTC360自带的插件,快速读取外业获得的点云数据,利用第三方建模软件ContextCapture等进行三维建模。行业内可以用来进行实景三维的软件产品不少,其中CC软件是应用较成熟的实景三维建模软件。通过CC对灞陵古桥依托前期外业数据进行建模后,进行效果匹配,建模正面图如图5所示。

图5 渭源灞陵桥三维建模正面效果图
4 结束语
三维激光扫描技术的优势显现,利用该项技术选用合适设备,对渭源灞陵古桥进行前期外业数据采集、点云数据处理及后期三维实景建模等工作提供了高效、便捷的方式。就古桥三维建模效果来看,本次项目实施还存在一些缺憾。一方面,由于古桥周围有树木的遮挡,这一客观原因使得对古桥进行扫描时未能全面地采集到古桥本体的所有数据;另一方面,三维激光扫描所进行的地表扫描缺失建筑顶部的数据,在扫描站点布设时,无法对古桥顶部进行设站,导致古桥顶部点云数据量有限,三维建模后效果欠佳;此外,古建筑结构及工艺较为复杂,在外业数据采集中,对古桥细部构建的扫描精度还有所欠缺。为提升古桥数据采集的全面性,后期可将三维激光扫描技术与无人机贴近摄影测量技术进行结合,内业对所得数据进行比对与补充,可在一定程度上完善古桥数据采集工作,对古桥的整体形态和外部特征进行较为全面和充分的数据收集,有利于精确化古桥建模工作。
