基于历史数据融合的电动汽车复合制动方法
2021-06-29林小军李万敏张亚萍李彦晶
林小军,李万敏,张亚萍,王 彦,李彦晶
(兰州工业学院 汽车工程学院,甘肃 兰州 730050)
0 引言
纯电动汽车电机具有再生制动能量回馈以及制动转矩精确可调的特点[1],基于此特点开发的电动汽车复合制动系统可在保证汽车制动强度的前提下,利用再生制动增加电动汽车续航里程[2].影响再生系统工作的关键因素是精确估计车辆当前的制动强度需求.因此在复杂道路尤其是多坡道的山区道路条件下,如何精确估计制动需求强度是当前复合制动控制方法的重要研究方向之一.现阶段的研究主要集中在2个方面:一是基于复合制动系统结构参数的协调控制方法研究,该方法是以车速和车辆减速度判断制动强度,然后采用逻辑门限值的方法选择分配系数来分配摩擦制动力和电机制动力[3];二是基于驾驶意图识别的再生制动控制方法研究,该方法主要以驾驶员踩踏制动踏板的强度分析为主,再结合车速、车辆减速度判断车辆的制动需求强度[4].山区道路具有坡道繁多、坡度角多变、道路线性变化多端,驾驶员视觉忙碌、心理活动复杂等特征[5],车辆的制动效果也随之而频繁多变.因此基于车速和车辆减速度的制动强度判断方法,因制动频繁多变而影响其准确性.另外,基于驾驶意图识别的判断方法准确性依赖于驾驶员的驾驶技术成熟度和个人心理素质,在复杂多变的山区道路对心理的影响下,其判断依据适应性也大打折扣.
针对电动汽车在山区道路行驶制动时的安全性及再生制动能量反馈最大化问题,本文提出了一种基于道路历史数据融合的复合制动控制方法.该方法在车辆首次通过一段山区道路时,利用GPS及三轴陀螺仪采集车辆该段道路的经纬度位置信息、坡道长度信息和坡度信息,通过分析计算后存储于数据存储及分析比对模块中.当车辆再次驶入已存信息的道路时,通过传感器采集的现数据与已存道路信息数据比对.比对成功后,整车控制器即可准确获知该段道路的完整信息.在已知道路信息的基础上,结合对应车辆状态信息,将制动工况分类,在每种制动工况下提出对应的控制方法,从而在保证车辆制动强度的前提下,最大程度发挥再生制动系统效能,提高山区道路下电动汽车制动性能[6].
1 复合制动控制系统总体结构
复合制动系统在电动汽车上属于通用性设计,本文所研究的控制方法应用在1辆单电机纯电动汽车,其制动系统包括摩擦制动子系统和电机制动子系统2部分,其系统结构如图1所示. 其中:电机制动子系统主要由电机(PM)、动力电池以及电机控制器组成;摩擦制动子系统包括机械制动器、真空助力器和液压助力器.各个系统之间独立工作,其状态信息通过CAN总线形成交互,并汇总至整车控制器(VCU).整车控制器根据车辆状态,以及每个制动子系统的状态,对复合制动系统中每个子系统输出的制动力进行动态协调[7].
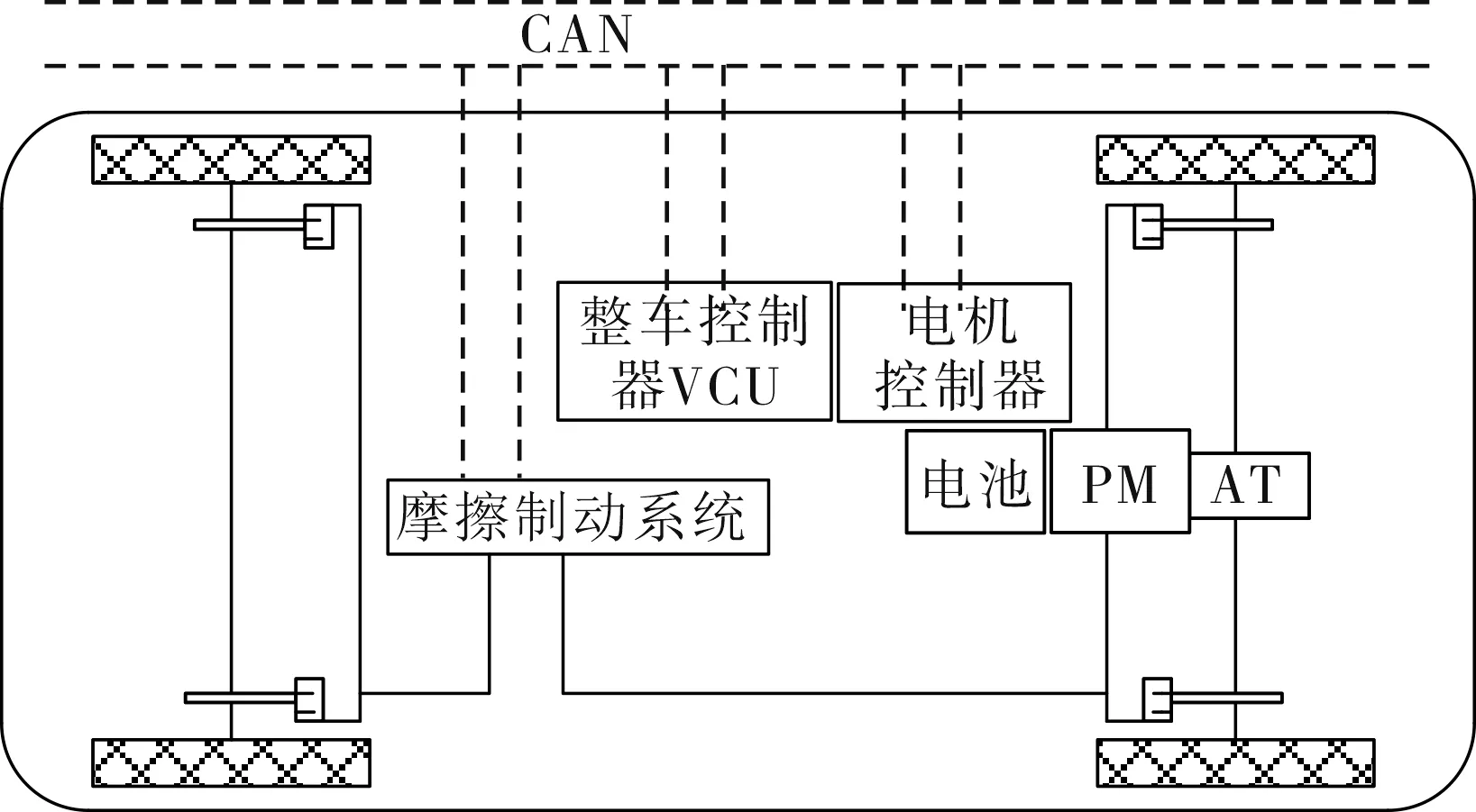
图1 电动汽车制动系统结构
2 制动过程分析与复合制动工况划分
2.1 电动汽车坡道制动过程分析
电动汽车在车辆运行过程中受到驱动力Ft、重力分力Fi、滚动阻力Ff、空气阻力Fw以及加速阻力Fj的综合作用[8].当电动汽车在下坡行驶时,其纵向动力学方程为
Ft+Fi=Ff+Fw+Fj,
(1)

式中:T为电机输出转矩;i为机械传动比;ηT为机械传动效率;r为车轮半径;α为坡度角;CD为空气阻力系数;A为迎风面积;ua为车速;m为汽车质量;σ为旋转质量换算系数;du/dt为车辆减速度.
当采取制动措施时车辆受到重力分力、加速阻力、滚动阻力、空气阻力、制动器制动力和电机制动力的作用,受力分析如图2所示,其平衡关系为

图2 车辆下坡时的受力分析
Fi=Ff+Fw+Fj+Fbreak+Fb,
(2)
式中:Fbreak为持续制动力;Fb为行车制动器制动力.
空气阻力、滚动阻力和加速阻力跟车辆本身结构设计、道路环境因素有关,因此下坡制动力主要由复合制动系统提供.整理后得车辆制动减速度为

(3)
2.2 复合制动工况划分
电动汽车在下坡制动过程中,复合制动系统制动力主要依靠电机控制器和液压控制器分别控制输出电机制动力和摩擦制动力.电机制动力来源于车轮的惯性倒拖电机转动,在转换动能发电的基础上,产生阻碍力矩形成制动力[8].根据制动时的车速和制动减速度,再结合驾驶员踩踏制动踏板的力和踏板开度,电动汽车的制动可以分为紧急制动、中等减速制动、轻度滑行制动3种模式.
紧急制动是驾驶员遇到突发危险情况而采取的一种制动强度大、制动减速度高的减速或减速至提车的紧急措施.在这一制动过程中,制动减速度一般大于3 m/s2.为了保证制动强度,此时以摩擦制动器产生制动力为主,该工况为紧急制动工况[9].
中等减速制动一般发生于长大下坡路段,驾驶员需要采取连续的制动措施以使车速稳定在安全范围内,制动减速度1.6 ~3.0 m/s2.该制动过程中,为避免制动器连续摩擦升温而导致制动器制动效能下降,优先以电机再生制动为主,不足部分由摩擦制动补足.再生制动虽然可以回收制动能量用以补充电池电量,但电池荷电状态SOC过大则又影响电池寿命.因此在中等减速模式下考虑电池充放电性能,当SOC<60%,电机以最佳功率再生制动向电池充电,该制动工况划分为再生制动工况;当60%
轻度滑行制动模式一般发生于坡道较缓或车速较低的条件下,此时需求制动力小,制动减速度低于1.6 m/s2,此时若电机充电功率低,或者电池SOC较高,则采用摩擦制动,该工况也划分为减速工况;若坡道较长,电机制动时虽然回馈电流小但充电时间长,且制动力完全可由电机制动提供,则采用电机制动,该工况划分为减速滑行工况.
2.3 历史数据获取与数据处理
当车辆首次运行于某段道路时,通过GPS持续接收当前运行路段的导航坐标系定位数据经度B、维度L及GPS正高程H.通过三轴陀螺仪辅助GPS获取前后2个测量点的高程点定位值H1和H2,计算得到当前道路的坡度θ,由此构建改路段导航坐标参数(B1、2……,L1、2……,H1、2……,θ1、2……),并将该段道路的导航坐标参数储存作为历史数据.
当车辆调用历史数据用于计算当前车辆需求制动力时,首先利用高斯投影正算转换公式[10]将导航坐标系投影到高斯平面上,得到转换坐标(X′,Y′,Z′,θ′),然后通过固定公共点求出转换参数,利用转化参数将转换坐标(X′,Y′,Z′,θ′)转换为当前车辆本体坐标(x′,y′,z′,θ′)[11],得到当前车辆运行道路计算参数.
通过获知当前道路坡度角θ,当前车辆质量m,当前整车功率初始值Pf,分别采用自适应滤波算法进行滤波处理,其传递函数及滤波时间常数的表达式[12]为
G(s)=1/(τs+1),
(4)
式中:s为拉普拉斯算子;τ为滤波时间常数;R为测量噪声方差;Q为过程激励噪声方差.
计算制动目标功率修正因子为
λ=(kθ+1)((1-λ0)(m-m0)/Δmmax+λ0),
(5)
式中:k为标定参数;m0为整车空载质量;Δmmax为整车最大负载质量;λ0为车辆空载时修正系数,0<λ0<1.
因此计算车辆的制动目标转矩为
Tbq=λTbq0(α,u),
(6)
式中:Tbq0为道路坡度角为0、车辆满载条件下的制动目标转矩;α为制动踏板开度;u为车速.
3 复合制动控制方法
3.1 总体方案
通过制动工况的划分,可以发现道路信息、需求制动力、制动踏板上加载的动作强度以及电池荷电状态SOC是复合制动系统工作的关键因素[13].因此,本文在综合再生制动系统和摩擦制动系统结构及原理的基础上,以全局规划的思路,增加GPS及三轴陀螺仪等传感器采集道路信息并存储比对,制定了基于道路历史数据融合的复合制动控制方法,其总体结构方案如图3所示.

图3 复合制动控制方法总体结构
总体方案包括信息采集单元、整车控制器和电机控制器3个部分.其中信息采集单元主要采集9部分的数据信息,通过GPS和三轴陀螺仪采集车辆所处段道路的经度、维度、长度、坡度以及车速信息,以便对车辆所处的地理位置和地理环境有准确的判断;通过车速传感器采集当前车速信息并结合车载电脑所记录的整车参数信息,对车辆当前质量和整车动能进行评估;动力电池输出电流电压传感器主要采集动力电池当前状态参数,对电池储能程度进行估计;电机转速和转矩信息采集对电机功率及反馈能量转化效率进行估计;制动踏板力及开度传感器采集驾驶员加载在制动踏板上的动作程度信息,以判断当前驾驶员对制动的强度需求.
整车控制器包含道路信息计算模块、整车质量计算模块、道路数据存储及历史数据比对分析模块、制动力需求计算模块和制动力分配计算模块.道路信息计算模块主要计算当前所行驶道路的经纬度位置信息、道路坡长和坡度角信息,并转换为控制器可用的定位参数;整车质量计算模块,通过当前的载重量结合车速,计算车辆当前制动动能的初始参数值;道路数据存储及历史数据比对分析模块获取位置参数后列表存储并分析比对是否存在历史数据,若有车辆行驶的历史数据,则调用后得到该段道路的完整坡长坡道信息.整车需求制动力计算模块则根据驾驶员加载在制动踏板上的力以及踏板开度计算驾驶员的制动强度意图,结合当前坡道势能和车辆运行动能,计算出整车需求制动力;计算出的整车需求制动力信息发送至制动力分配计算模块,该模块分析摩擦制动子系统和电机制动子系统所能提供制动力初始值和制动力范围,并分配制动力至2个制动子系统.
电机控制器主要包含有电机输出计算模块、动力电池SOC状态参数预测模块和电机输出修正模块.电机输出计算模块主要采集电机当前的转矩和转速,以此计算电机输出功率.当电机处于制动能量反馈工作时,可计算发电功率.动力电池SOC预测模块根据电池输出端的电压和电流,通过计算来判断当前电池的荷电状态SOC,以此作为电机发电的目标判断依据.由于SOC的判断受环境影响,SOC持续监测、预测并进行修正,因此设置有电机输出修正模块,根据SOC的监测对电机的输出目标值进行不断修正.
3.2 控制方法
基于历史数据融合复合制动控制方法主要解决电动汽车运行,尤其是在山地道路行驶时保证制动强度与最大化能量回收的问题.当电动汽车首次运行于一段山地道路时,GPS/三轴陀螺仪会采集该路段所处的定位位置和长度,坡道的长度和坡度;信号采集单元同时记录车辆坡顶的初速度,下坡时的车速变化、制动减速度,下坡后的末速度以及制动踏板力和开度;也采集电机在下坡过程中调整车速变化所需的功率(即电机的输出转速和转矩),电池传感器采集动力电池状态参数变化量(以电压和电流数据表征),这3部分数据在通信总线中完成信号传输并存储.
当电动汽车再次驶入该路段时,GPS/三轴陀螺仪采集到的道路数据与已存储的道路信息比对,如为已行驶过的道路,通过历史数据即可知该下坡路段的长度坡度等完整信息,计算后即可得到该下坡路段的势能,然后根据当前的车辆载重量和车速,即可判断车辆下坡的初始动能,最后再结合驾驶员踩踏制动踏板的强度,在需求制动力计算模块内计算出需求制动力值.
保证车辆制动安全性的前提为复合制动系统产生的制动力满足需求.在此条件下,根据车辆参数首先计算出摩擦制动系统制动力输出范围、电机制动力输出范围,再基于驾驶员踩踏制动踏板的强度,以及电池荷电状态SOC,将车辆制动工况划分为紧急制动工况、再生制动工况、减速再生制动工况、减速工况和滑行再生制动工况.根据划分的制动工况,复合制动系统各子系统输出对应制动力,合值为需求制动力.根据复合制动系统工作模式,设计复合制动控制方法控制流程,如图4所示.

图4 复合制动控制方法流程
4 仿真结果分析
为验证对道路识别的准确度以及复合制动系统控制方法的可靠性,首先利用搭载了GPS和三轴陀螺仪的实车,采集了4段坡度不大于10%,坡长在2 km以内的道路定位数据和坡道数据,构建多个下坡道路工况,并在Matlab/Advisor软件中存储为下坡循环工况试验环境.表1为建立的下坡制动工况.

表1 下坡道路制动工况
选用Advisor软件中一款纯电动汽车为仿真试验对象,并将构建的下坡道路工况以及建立的复合制动控制方法存储于该车的控制策略模块中,路面附着系数为0.75.纯电动基本参数为整车整备质量1 584 kg,车轮半径282 mm,传动系数0.4,电机额定功率75 kW,额定转速为3 500 r/min,峰值转速为5 000 r/min,制动器制动效能因数0.9,摩擦因数0.02,制动盘有效半径93.5 mm,前后轮制动力分配系数0.7.
在4段下坡道路中,通过历史数据比对,对道路的经纬度识别误差在2 m以内,对总坡长的识别误差在5 m以内,对坡度的识别误差在5%以内,说明车辆对历史道路数据的识别精度较高.
选取下坡坡道工况3为典型道路模型,在初速度v0=50 km/h、电池初始SOC为40%的情况下,分别对车辆采取紧急制动、中等减速制动和轻度滑行制动等制动强度下进行仿真,车辆仿真结果如图5所示.
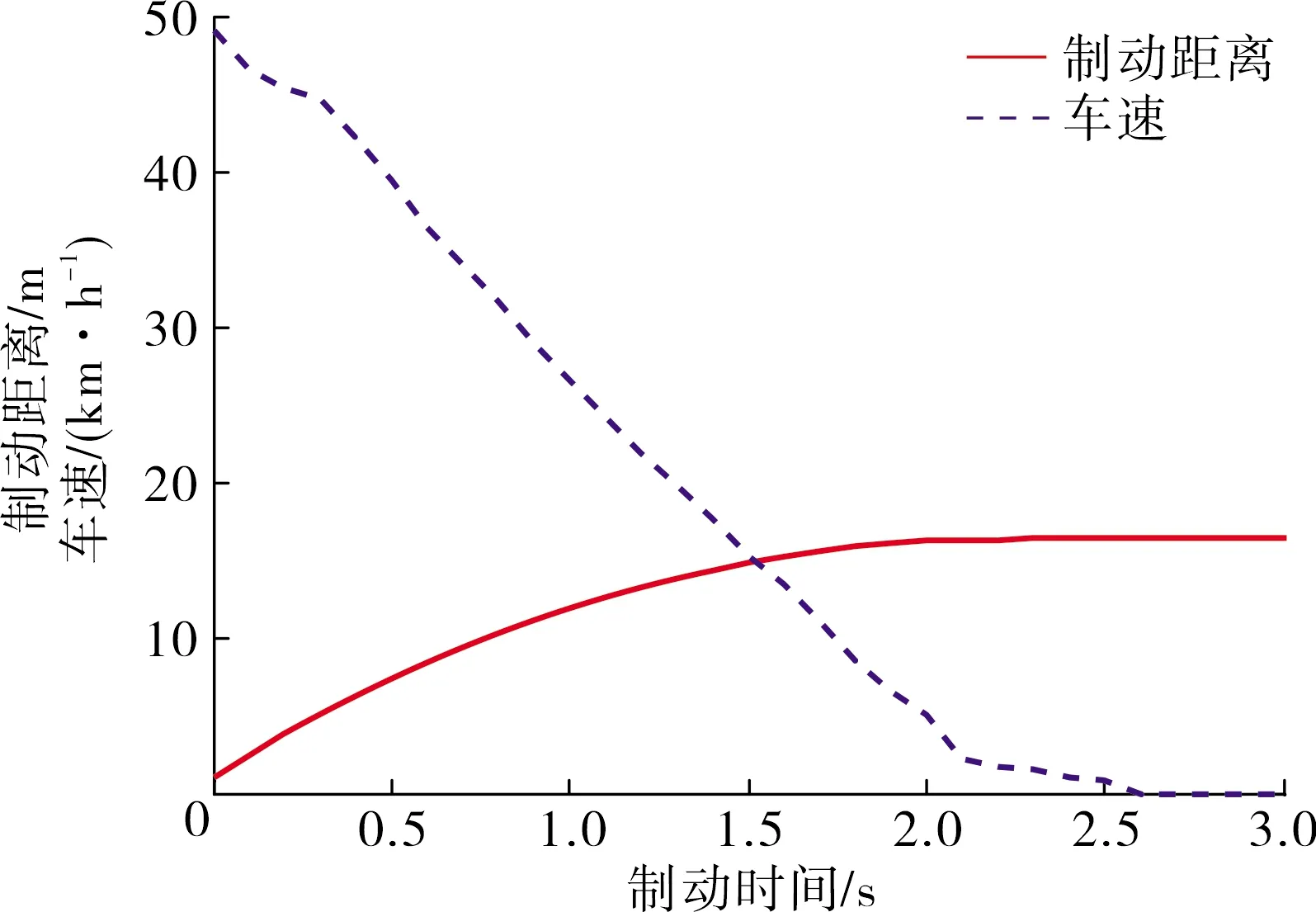
(a) 紧急制动

(b) 中等减速制动

(c) 轻度滑行制动图5 不同制动强度下制动效果
纯电动汽车采用道路历史数据融合控制方法的复合制动系统制动效果,符合GB 12676《汽车制动系统结构性能和实验方法》的要求,与原车制动系统仿真制动效果对比结果如表2所示.

表2 制动效果对比
通过对比试验可知,采用历史数据融合的复合制动控制系统完成了复合制动系统的协调控制,满制动效能满足制动需求,并在确保制动安全性的基础上,制动能量回馈效率在中等和轻度制动时有所增加,提高了整车经济性.
5 结语
本文针对纯电动汽车在山区道路行驶过程中的制动效能问题,建立了一种通过多传感器采集道路信息的复合制动系统,并根据计算得出的制动需求强度提出了制动工况划分方法.根据复合制动系统在不同制动工况工作时的影响因素,制定了对应的制动力分配策略,使复合制动系统在融合道路信息、车辆状态及制动强度需求等信息的基础上匹配相应制动力,满足车辆的制动要求.
本文控制方法仅采用了全局规划的思路,并且实际车辆运行过程中未计算道路路面附着系数变化带来的制动影响.在后续的研究中,将结合全局规划与动态规划的控制策略,并将路面附着系数作为变量带入,以进一步提高车辆制动转矩的控制精度,提升制动效能.
