基于数字图像识别和光纤传感器的直流大电流在线校准装置
2021-06-28梅国健王家福李传生林飞鹏董平邵海明蔡晋辉
梅国健,王家福,李传生,林飞鹏,董平,邵海明,蔡晋辉
(1. 中国计量大学,浙江 杭州 310018; 2.浙江省计量科学研究院,浙江 杭州 310018;3.中国计量科学研究院,北京 100029; 4. 山西省计量科学研究院,山西 太原 030021)
1 引 言
在电解冶金和电化学工业,有色金属及氯碱化工产品都需要通过电解来生产[1]。电解电流一般可达几十kA到数百kA,准确的电流测量事关工艺控制、安全生产、成本核算和节能降耗[2,3]。
目前,工业超大电解直流电流普遍采用霍尔电流传感器进行测量。它将霍尔元件置于聚磁铁芯的气隙之中,基于霍尔效应检测铁芯中的剩余磁通,并由后端电子线路对二次电流进行反馈控制,直至铁芯处于零磁通状态,一次、二次实现安匝平衡[4,5]。
根据工作原理,霍尔元件临近磁场(如电流回线)的干扰、二次电路的零点漂移都将影响传感器的测量精度,在传感器安装完成后以及长期运行后都需要进行定期校准。但是,超大电流霍尔传感器的体积、重量庞大,安装、运输不便,企业生产也不可间断,因此,无法送到计量实验室校准,在线校准是合理且经济的计量手段。
基于Faraday磁光效应的光纤电流传感器通过测量两束正交圆偏振光之间的相位差实现电流测量[6~9]。采用闭环信号检测技术,可以保证传感器在很大动态范围内具有较高的线性度。光纤敏感环采用柔性封装设计,无需断开载流母线直接形成闭合测量环路,实现在线测量,测量精度对环路形状、母线偏心、杂散磁场干扰的敏感度较低,一般优于0.2%,非常适用于超大直流电流的在线校准。
在工业现场,霍尔电流传感器的输出直接接入二次测控系统,一般没有预留计量接口。为解决该问题,本文设计了一套基于数字图像识别和光纤传感器的直流超大电流在线校准装置,利用图像传感器采集霍尔电流传感器二次显示仪表的示数图像,通过上位机图像处理算法还原传感器的测量值[10,11],并与光纤电流传感器的采样值实时比较,实现了霍尔电流传感器的在线校准。
2 校准装置设计
2.1 总体方案
如图1所示,本装置由光纤电流传感器、图像传感器、上位机数据采集系统组成。光纤电流传感器为现场直流超大电流测量的标准传感器,采用光信号输出,经光电转换变为电信号,通过USB接口进入上位机。图像传感器主要用于采集霍尔电流传感器二次显示仪表的示数图像,并将图像信息通过以太网传入上位机。上位机数据采集系统同时采集光纤电流传感器和图像传感器的输出,通过图像处理算法获取霍尔电流传感器的测量值,并与图像获取开始至图像识别完成时间段内光纤电流传感器采样值的平均值进行比较,实时计算霍尔传感器的测量误差。
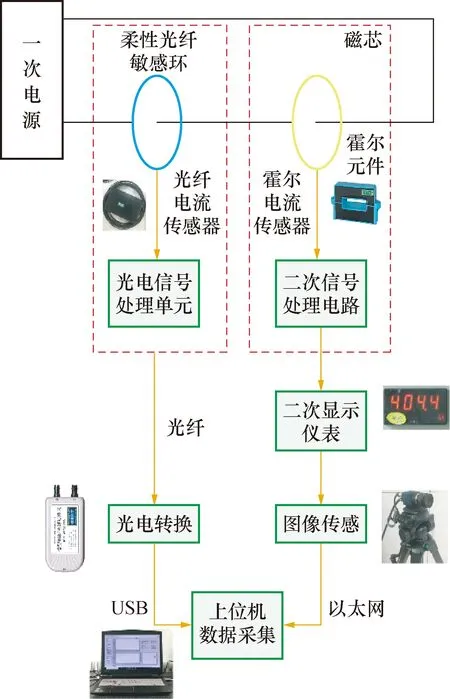
图1 直流大电流在线校准装置Fig.1 DC high current online calibration device
2.2 标准电流传感器
系统采用光纤电流传感器作为标准,原理如图2所示[12]。光源发出的光经环行器,由起偏器变为线偏振光,经45°光纤熔点被均分到保偏光纤的快、慢轴上。两束正交的线偏振光沿保偏延迟光纤传输,并由1/4波片变为左旋、右旋圆偏振光,在被测电流的作用下,两束正交的圆偏振光之间产生相位差,该相位差与被测电流成正比。经传感光纤末端反射镜反射后沿原路返回,相位差加倍。两束正交圆偏振光经1/4波片再次变为线偏振光[12~14],但偏振方向发生了互换,两束线偏振光最终经偏振器检偏并发生干涉。两束信号光沿光路传输的过程中分别经历了正交的偏振模式,只是先后顺序不同,传感器的光路结构完全互易,它们之间的相位差仅由被测电流产生的Faraday相移φs产生,可表示为:
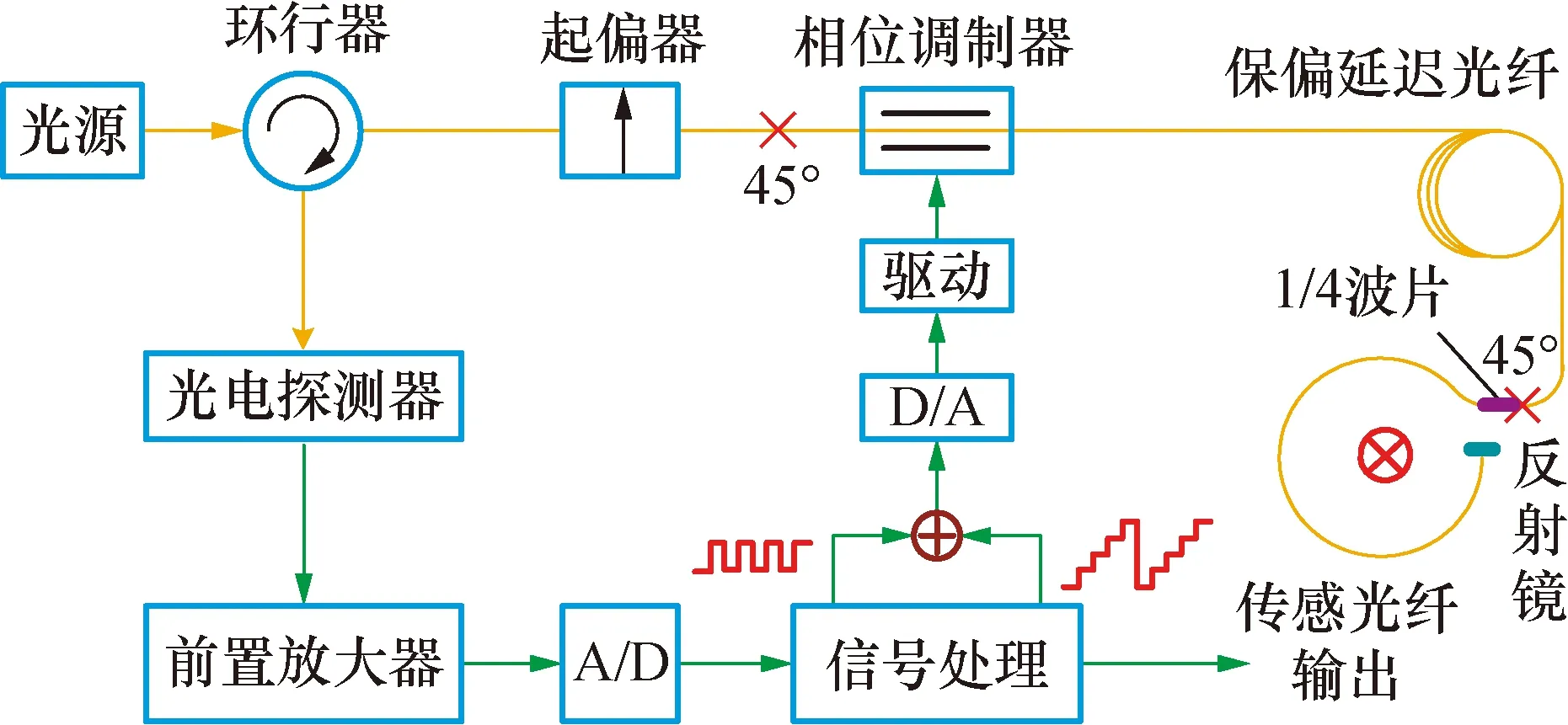
图2 光纤电流互感器原理示意图Fig.2 Configuration of fiber-optic current sensor
φs=4F=4VNI
(1)
式中:V为传感光纤的Verdet常数;N为光纤圈数;I为被测电流。
干涉光强由光电探测器变为电信号,闭环检测系统通过相位调制及数字锁相技术从干涉信号中解调出被测电流,并利用阶梯波调制相位反馈补偿被测电流产生的Faraday相移,将系统锁定在灵敏度最高的工作点上,提高传感器的线性度和动态范围。
基于光纤电流传感器的量程自扩展特性,利用多圈传感光纤增大等效测试电流,并采用等安匝法对传感器进行校准。传感光纤3圈,等安匝电流150 kA,等效电流达到450 kA,校准结果如图3所示,测量不确定度Urel=0.1%,k=2。

图3 光纤电流传感器校准结果Fig.3 Calibration results for fiber-optic current sensor
2.3 图像传感器
本系统采用CMOS图像传感器采集霍尔电流传感器二次显示仪表的示数图像。传感器的分辨率为2 448×2 048,模数转换精度为12 bit,图像的尺寸、曝光时间、增益等参数均可程控。传感器的帧率为20 fps,故获取单张图片的时间约为50 ms。上位机数字图像识别算法执行时间约为200 ms,故从图像获取开始至图像识别完成获取电流测量值的时间约为250 ms。
3 数字图像处理与识别
3.1 图像处理识别流程
霍尔电流传感器二次显示仪表示数的识别流程如图4所示。对于不同的二次显示仪表,示数的大小、形态、颜色、区域都会存在显著差异,很难找到通用判据实现自动分割,故首先采用手动方式获取示数有效区域,然后对有效区域进行灰度转换、滤波、二值化等预处理,最后对图像进行识别。

图4 数字图像的预处理与识别过程Fig.4 Pretreatment and identification process of digital image
3.2 预处理
3.2.1 灰度转换
由于彩色图像比较复杂,包含的信息较多,对数字识别的准确度造成很大影响,需要对有效区域进行灰度化处理,图像灰度化是将彩色图像中的彩色信息剔除。保留了图像的亮暗信息,简化了处理的过程又不会影响识别的精度。
3.2.2 中值滤波
在采集的图像中往往会带有噪声,噪声对数字识别的精度会造成一定的影响,需要对图像进行滤波处理。本文采用中值滤波处理图像,中值滤波可以过滤掉图像中的高频或者低频分量,这种方法的优点是既消除了噪声,又防止图像边缘模糊。
3.2.3 二值化
图像二值化是把灰度图像转为二值化图像,便于将仪表示数从背景中提取出来。灰度图像中点的像素取值范围为0~255,而在二值化图像中,每个像素点的取值仅为0或者255。处理方法为:

(2)
式中:w(i,j)为二值化后点的像素值;T为阈值。
根据式(2):灰度图中,如果一个点的像素点的灰度值小于阈值,则这一点的灰度值置为0;若一个点的像素灰度值大于等于阈值,则这一点的灰度值置为255。这就是灰度图进行二值化的本质。图像经过二值化处理之后,图像仅有黑、白两种颜色,这样可以很容易地将背景与目标区分。
3.2.4 闭运算
闭运算是首先对图像先进行膨胀处理,然后进行腐蚀处理,该过程具有连接临近图像的作用。本文需要识别的数字是数码管数字,而该类数字的每一段数码管是不相连的,需要通过闭运算将数码管连接形成一个整体。
3.2.5 字符分割
字符分割是把整个图像的每个字符分割出来,使其成为单个字符。图像完成二值化和闭运算处理后,每个字符构成了若干个独立的连通域。找到每个连通域行列的起始位置和终止位置,记录最大最小的横纵坐标,构成一个矩形区,最终分割出单个字符。本系统的图像识别方法需针对示数的每个数字分别识别,图像传感器采集到的图像由多个数字组成,需将这些数字逐个分割。
3.3 仪表示数的识别
3.3.1 小数点的识别
由于小数点距其两侧的数字距离较小,若直接进行闭运算,容易导致小数点与数字串联形成一个整体。因此,在进行闭运算之前,必须首先找到小数点的位置,可通过轮廓的大小进行筛选。若宽高比在1到2之间,且纵坐标在数字的下方位置,则说明是小数点,记录该小数点的横坐标,并将小数点所在的所有区域的像素设置为(0,0,0)。当数字识别完成之后,通过横坐标的大小,在识别结果中加入小数点。
3.3.2 数字识别
数码管式显示仪表的示数由7段数码管组合而成,其中垂直方向有4段,水平方向有3段,且没有弧度,故穿线法适用于此类示数的识别。穿线法是一种简易而快捷的方法,在确定每个字符所在的位置后,通过判断每一段数码管的亮暗情况来识别相应的数值。对于数字图像,每一段数码管的像数值个数可以表示亮暗情况。
如图5所示,在完成字符分割后,接着分别在平行于字符水平方向的1/3处和2/3处作两条分割线,穿过F、G两段以及D、E两段;在平行于字符竖直方向1/2处作一条分割线,穿过A、B、C三段。在数字识别过程中,实际显示字符的判断可以以提取到的这7段的特征值作为依据。对两条水平分割线,在水平线上对像素点进行从左到右扫描,可知D、E、F、G这4个数码管是亮还是暗。同理,对于竖直分割线,对像素进行从上到下扫描,通过判断该竖直线与A、B、C三段是否相交,来判断A、B、C这几根数码管的发亮情况。最后,排列组合以上得到的扫描结果,即可得出数字区域中数字的识别结果。对应的结果如表1所示。

图5 穿线法识别数字Fig.5 Number identification by threading method
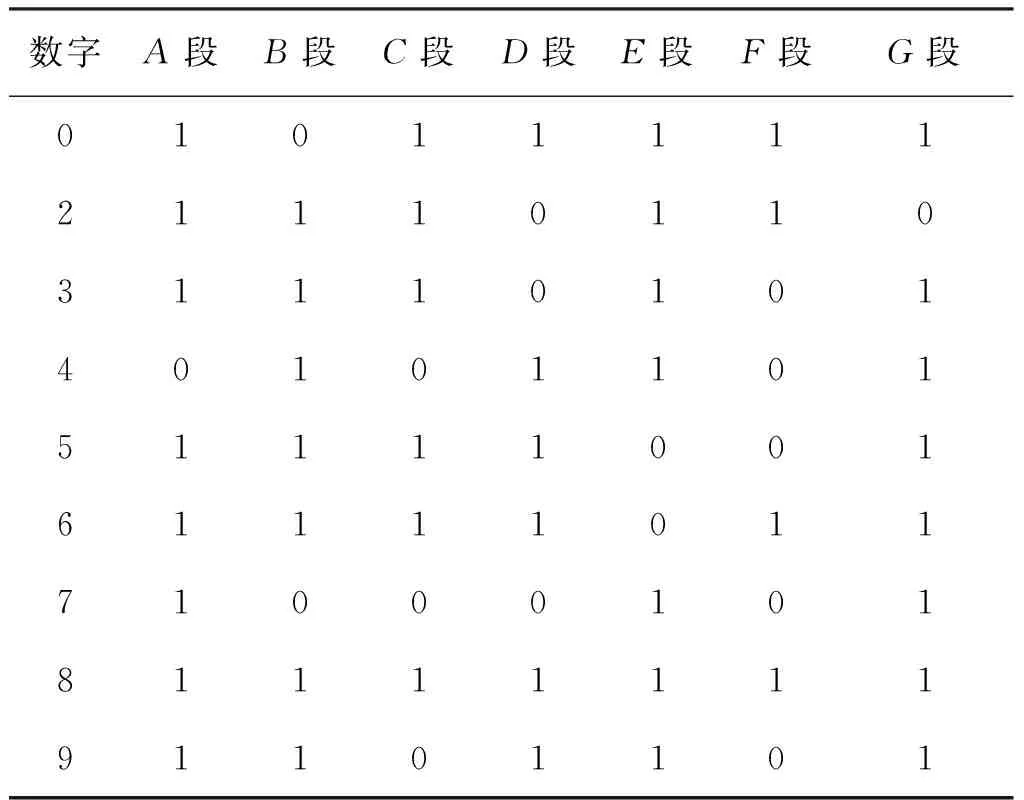
表1 数字特征表Tab.1 Recognition result table
对于数字1,若直接采用穿线法,则与数字8的特性相同,无法采用穿线法进行识别。因此采用宽和高之间的比值来判定,当其高和宽之间的比例大于4,则认为该数字为1。
在本系统中,穿线法识别的正确率直接影响测量结果,为了验证该方法的可行性,笔者采用400张不同的数字图像进行识别。实验结果表明,穿线法的识别正确率可达97%以上。
4 现场校准
利用本文研制的直流超大电流在线校准装置对某电解铝厂总母线霍尔电流传感器进行了在线校准。如图6所示,光纤电流传感器用于测量一次总母线电流,为避免现场恶劣电磁环境的干扰,传感器的测量值采用光纤传输至中控室上位机数据采集系统。上位机软件控制图像传感器采集中控室内霍尔电流传感器二次仪表的示数,并对回传图像进行处理和识别,将识别结果与光纤电流传感器的测量值进行实时比较。二次显示仪表示数刷新时间为1 s,大于示数图像识别时间,不会出现漏读数据的情况。

图6 总电流霍尔传感器在线校准Fig.6 Hallcurrent sensor online calibration
图7所示为光纤电流传感器、霍尔电流传感器测量结果及误差曲线。从测试结果可得:总母线电流整体较为稳定,400 kA下被校霍尔大电流传感器的测量误差小于0.35%。

图7 总母线霍尔电流传感器校准结果Fig.7 Calibration result for Hall current sensor
5 结 论
针对金属电解及氯碱化工领域霍尔超大直流电流传感器的在线校准问题,基于光纤电流传感技术和数字图像处理、识别技术,研制了一套直流超大电流在线校准装置,并开展了现场实验研究,结论如下:
(1) 系统可正确识别现场霍尔电流传感器二次显示仪表的示数,并实现了与标准光纤电流传感器的实时比较,证明了校准方法及装置的可行性。
(2) 现场校准实验结果表明该霍尔大电流传感器在400 kA下测量误差小于0.35%。
本装置仅适用于稳态直流超大电流的校准,对于工艺过程突变引发的电解电流瞬态变化,受限于图像采集及识别算法的实时性,无法准确捕捉。由于运行环境强烈的外磁场干扰以及二次信号处理电路零点漂移的影响,安装后校准及长期运行后周期校准在所难免;因此,建议传感器的生产企业设计计量接口,以便与标准传感器进行实时同步比较,全面评估传感器的运行状态。
