基于参数辨识的力传感器动态校准方法
2021-06-28江文松李泓洋王中宇
江文松, 尹 肖, 李泓洋, 罗 哉, 杨 军,, 王中宇
(1. 中国计量大学 计量测试工程学院,浙江 杭州 310018; 2. 中国航空工业集团有限公司 北京长城计量测试技术研究所,北京 100095;3. 中国运载火箭技术研究院 空间物理重点实验室,北京 100076;4. 北京航空航天大学 仪器科学与光电工程学院,北京 100191)
1 引 言
力传感器(force transducer, FT)动态校准是实现机械结构动态载荷高精度测量的基础,被广泛地应用于起落架着陆冲击载荷试验、机翼载荷校准试验、整车碰撞试验等动态力学特性的评估,对精密高端装备的力学计量意义重大[1~4]。目前,动态力校准方法有3种类型。第1种是正弦力校准法,例如,Prilepko M Y在激振器上实现力传感器动态校准[5];Nozato H等采用多组传感器信息融合实现该方法的修正[6];张力等采用激光干涉法实现100 kHz扫频模式正弦力校准[7,8]。第2种是阶跃力校准法,例如,Kobusch M等采用激光多普勒干涉技术实现阶跃力校准[9];张力等采用快开阀在10~100 μs下降时间实现了1.2 MN负阶跃力校准等[10]。第3种是冲击力校准法,例如利用落锤结构能实现120 kN冲击力的校准[11,12];Meng F等进一步实现了200 kN冲击力校准[13];Jain S K等通过对标准载荷的放大实现1MN冲击力校准[14]等。这些校准方法为力传感器的动态测量提供了条件。但是,动态校准过程目前仍然沿用静态分析方法,仅通过峰值、脉宽及灵敏度等静态指标很难评价被校准力传感器的时变特性[15~17]。
力传感器动态校准是通过其特性参数复现的,准确辨识其特性参数是提高动态校准能力的关键。因此,为了克服静态特性指标无法实现力传感器动态校准的缺点,本文通过建立被校准力传感器的参数化数学模型,依据传递函数的频谱特性辨识模型参数,采用频率分析法判断动态校准模型的稳定性,从而实现动态力的校准。
2 力传感器参数化动态模型
为便于动态特性分析,将力传感器近似为二阶模型。压电材料具有弹性和阻尼特征,弹性结构的劲度系数为k,阻尼结构的阻尼系数为f,顶部质量块的质量为m1,基部质量块的质量为m2,如图1所示。
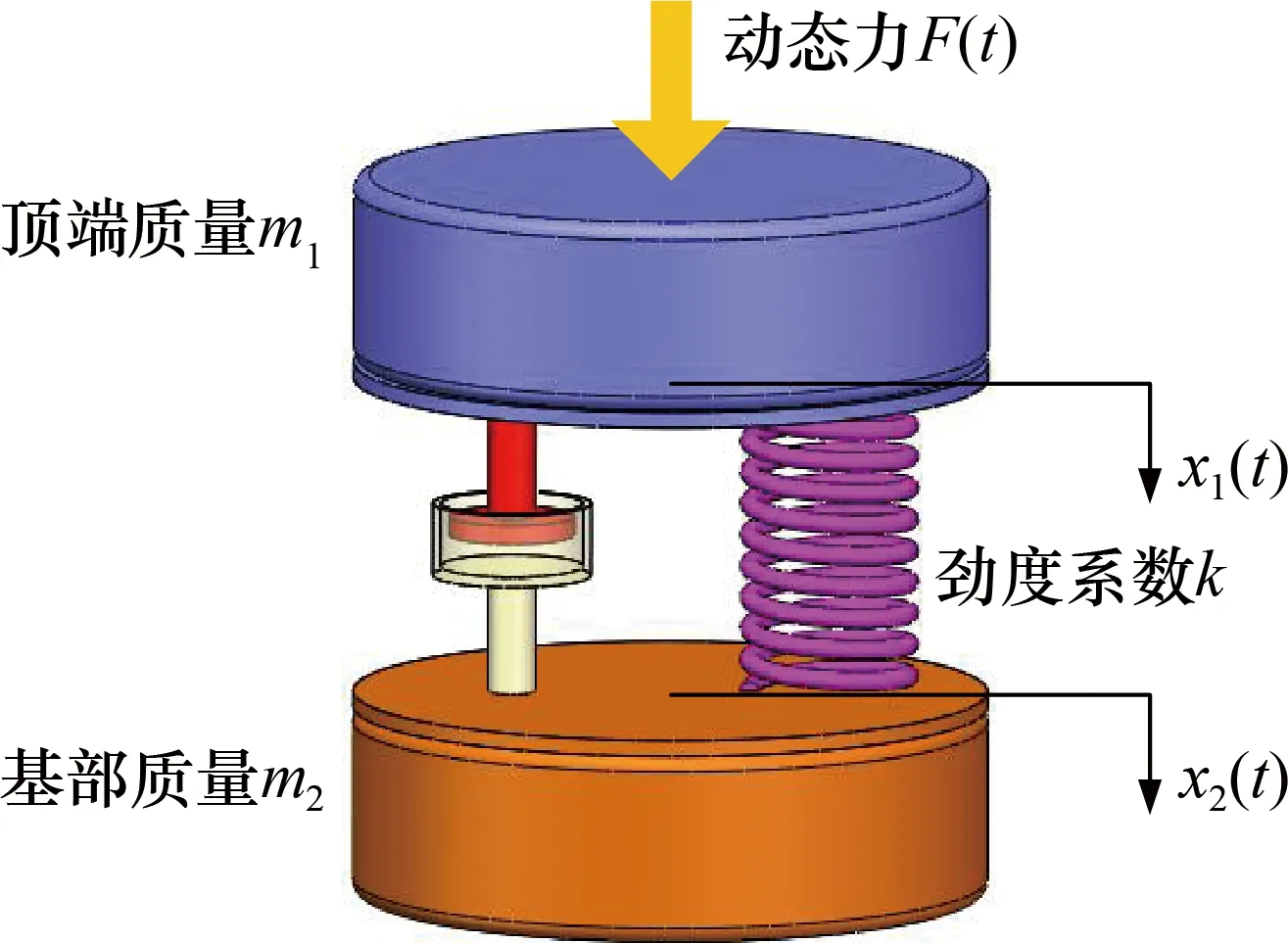
图1 力传感器二阶近似模型Fig.1 Approximate second-order model of FT
在力F(t)的作用下,质量块m1和m2在空间上产生的相对时变位移分别为x1(t)和x2(t),通过受力平衡关系可得:
(1)
式中:k为压电材料的劲度系数;f为其阻尼系数;t为时间。
令时间t时m1和m2之间的相对位移z(t)满足:
z(t)=x1(t)-x2(t)
(2)
联立式(1)和式(2)并对微分方程取拉氏变换:
(3)
根据式(2),可将式(3)简化为:
(4)
因此可以进一步求得:
(5)
根据力传感器的压电效应,相对位移z(t)产生的电荷q(t)经过调制后,输出电压为u(t),它们之间满足近似线性关系。令u(t)=az(t),a为灵敏度,其大小与压电系数、调制和放大电路有关,可通过静态标定求解。式(5)可进一步表示为:
(6)
则力传感器的开环传递函数G(s)表示为:
(7)
将G(s)标准化:

G1(s)G2(s)G3(s)
(8)
式(8)中,根s1,2分别为2个极点,s1,2为:
(9)

令s=jω,将式(8)转换成频率特性表达式:
(10)
式中:A(ω)为传递函数G(s)的幅频特性;φ(ω)为相频特性。
(11)
因此只要确定了被校准力传感器的频率特性,就能辨识出关键参数指标。力传感器动态特性由其传递函数确定,需要根据激励作用来求解传递函数模型的各参数。
3 动态特性试验与分析
3.1 动态校准实验方法
为了求解被校准力传感器参数,通过落锤式冲击力校准装置获取激励与响应,其结构原理如图2所示。

图2 力传感器的冲击校准原理Fig.2 Impact force calibration principle of FT
落锤从一定高度h释放后做自由落体运动,被释放后的落锤经过位置1和2自由落体,与被校准力传感器垂直碰撞产生冲击力峰值f(t),碰撞过程满足动量和能量守恒:
(12)
式中:m为落锤质量;g为当地重力加速度;v为撞击瞬态速度;Δt为脉冲宽度。实验利用激光测振仪实时采集落锤碰撞瞬态的激励信号r(t) =f(t)。
作用在力传感器上的脉冲力f(t)符合脉冲信号δ(t)的特征,因此该输入响应经过拉氏变换可得F(s)=1。根据传递函数的定义:
U(s)=F(s)G(s)
(13)
可知输出信号的拉氏变换U(s)与被校准力传感器的传递函数G(s)的参数属性相同,即通过分析被校准力传感器输出响应u(t)就能由式(9)得到其参数模型。
3.2 频率特性分析
为验证本文方法,采用落锤式冲击力校准装置分别开展4次不同下落高度h下的动态力校准实验。在落锤与被校准力传感器垂直碰撞瞬态,激光测振仪高速采集落锤的速度变化量v(t),被校准力传感器同步输出瞬态信号u(t),如图3所示。

图3 作用在力传感器上的冲击力Fig.3 Impact force acting on the FT
落锤的冲击力作用在被校准力传感器上,通过质量与时变速度的积分就能复现该力值。利用4次测量数据,得到被校准力传感器灵敏度a=4.07 mV/g;4组输出脉宽分别为2.61,2.69,2.83,2.56 ms;峰值分别为7 913.2,7 518.5,4967.1,8 113.6 mV。静态指标说明随着电压幅值的增大,脉宽逐渐减小,但很难明显地甄别不同频率下的力传感器特性。
在采样时间内,分别计算速度变化量的功率谱v(t)和对应周期内被校准力传感器的瞬态信号u(t)的功率谱,如图4和5所示。

图4 速度变化量v(t)的功率谱Fig.4 Power spectrum of velocity change v(t)

图5 输出瞬态信号u(t)的功率谱Fig.5 Power spectrum of the output transient signal u(t)
在时间历程上,分别将被校准力传感器的激励信号和输出电压转换成频谱信号,如图6所示。可以看出4次测量实验中,冲击频谱信号只在低频段为非0 dB,其能量谱在该频段上呈单调递减的趋势;随着时变速度的衰减,频谱向高频段的0 dB回归,满足非周期单脉冲信号的频谱规律。
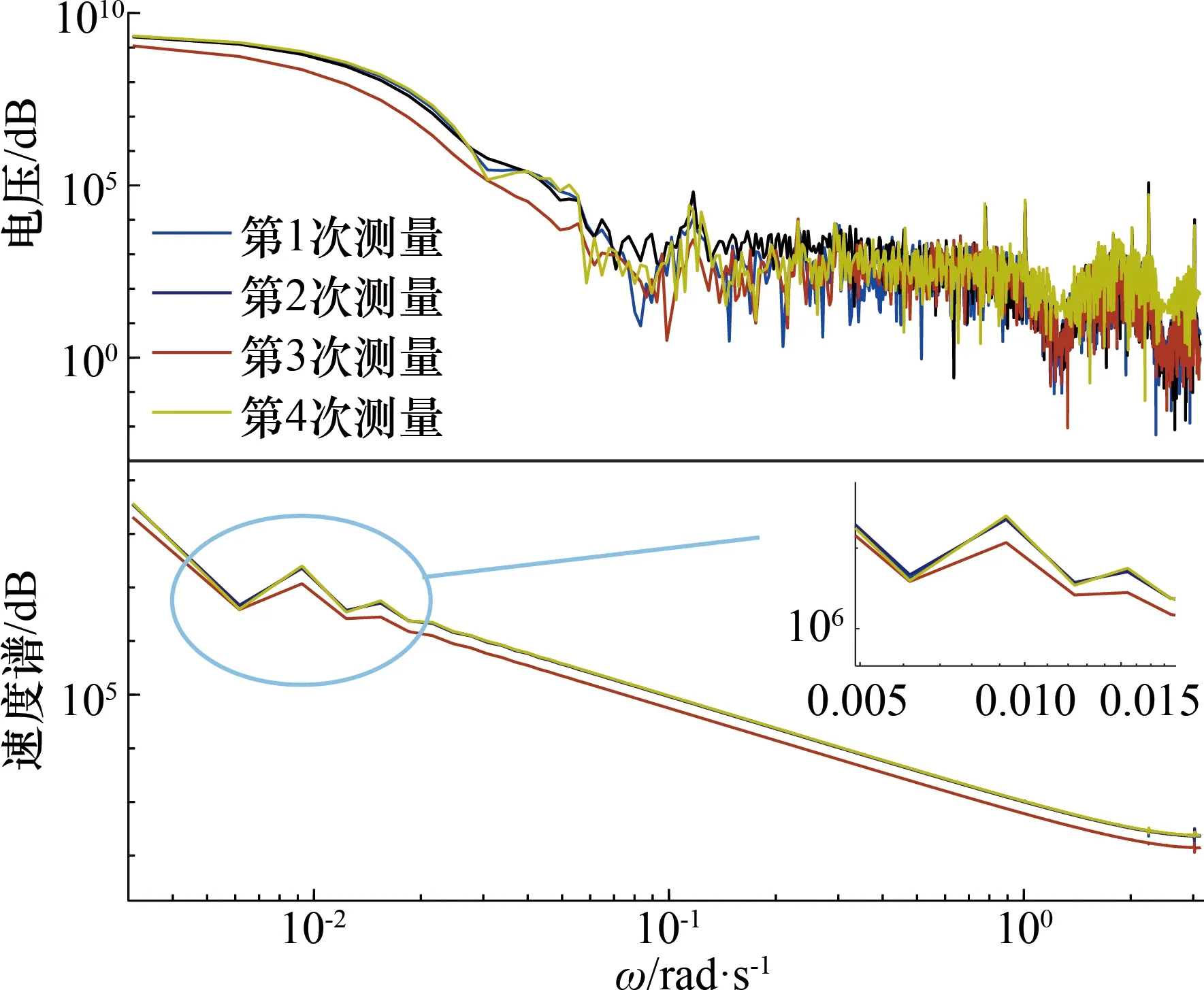
图6 激励与响应信号的频谱分析Fig.6 Spectral analysis of excitation and response signals
利用式(9)分别对实验数据进行幅值特性和相频特性分析,如图7所示。可以看出幅值特性曲线在工作频带上具有相近的幅值变化规律,动态力的改变对幅值误差的影响较小,说明被校准力传感器的幅值误差受工作频带的影响小;动态力改变对相频特性影响较大,动态力幅值变化会引起被校准力传感器产生震荡并引起相移。
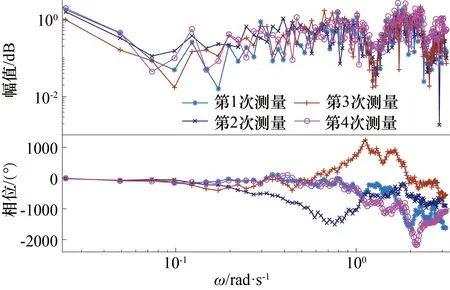
图7 传递函数的频率特性曲线Fig.7 Frequency characteristic of the transfer function
由相频变化特征可知,被校准力传感器的传递函数由比例环节和惯性环节组成,其离散幅值逐渐收敛。利用最小二乘法分别对不同测量条件下的幅频特性关系进行解析,代入式(9)即可求得被校准力传感器的特性参数,如表1所示。
根据表1的数据,将4次测量列的算术平均值作为被校准力传感器特性参数的最佳估计值。其中,弹性结构的劲度系数为0.01 N/m2,标准差为0.003 N/m2;阻尼结构的阻尼系数为3.93×10-4,标准差为0.99,即欠阻尼;顶部质量块的质量为64.44 g,标准差为0.95 g;基部质量块的质量为0.02 g,标准差为0.003 g。

表1 被校准力传感器的特性参数Tab.1 Characteristic parameters of the calibrated FT
为了验证特性参数对被校准力传感器稳定性的影响,利用频率分析法对动态校准模型进行开环幅相特性分析,获得开环传递函数的频率特性曲线,如图8所示。
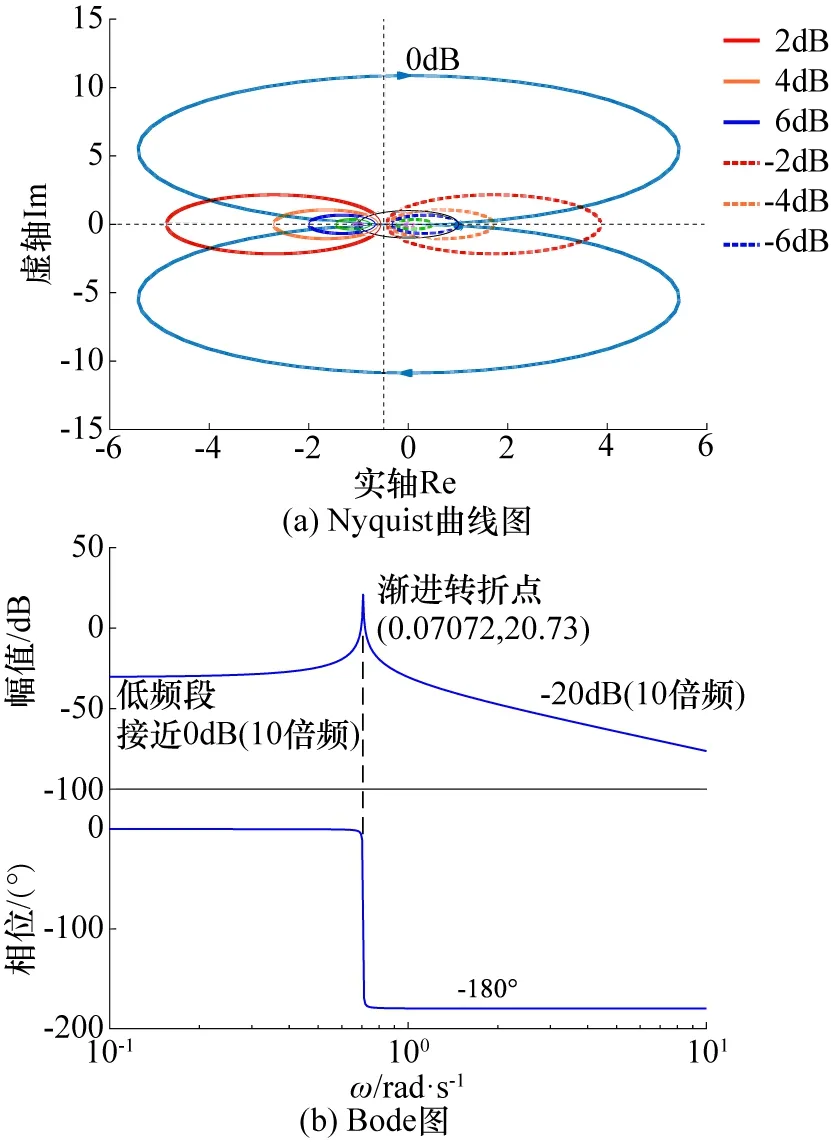
图8 动态校准模型的频率特性曲线图Fig.8 Frequency characteristic curve of the dynamic calibration model
可以看出被校准力传感器为0型震荡系统,低频渐近线接近0 dB(10倍频)。当频率为0.707 2 rad/s时,高频渐近线的斜率突变,出现转折并产生震荡;随着频率增大,相位环节由0°变化到-180°,与其幅频特性变化趋势一致,说明被校准力传感器模型稳定。
为了定量衡量其相对稳定性,分别计算了相位裕量和幅值裕量。结果表明,相位裕量为5.63°,说明闭环曲线未包围(-1, j0)点;幅值裕量为4.12×104dB,闭环曲线远离(-1, j0)点。二者均验证了被校准力传感器具有良好的相对稳定性。
4 结 论
本文分别通过建立被校准力传感器的参数化数学模型、传递函数的参数辨识和动态校准模型的稳定性判断实现动态力校准,克服了力传感器动态校准静标动用的问题。
1) 实验表明被校准力传感器在4组不同动态力作用下的输出脉宽分别为2.61,2.69,2.83,2.56 ms;峰值分别为7 913.2,7 518.5,4 967.1,8 113.6 mV,静态指标仅说明电压幅值的增大会引起脉宽的减小,但很难明显地判别力传感器在不同频率下的特性。
2) 对被校准力传感器进行模型参数辨识,其中,弹性结构的劲度系数为0.01 N/m2,标准差为0.003 N/m2;阻尼结构的阻尼系数为3.93×10-4,标准差为0.99;顶部质量块的质量为64.44 g,标准差为0.95 g;基部质量块的质量为0.02 g,标准差为0.003 g,表明该方法能以较小的标准差辨识被校准力传感器的结构参数。
3) 被校准力传感器开环传递函数的相位裕量5.63°,闭环曲线未包围(-1,j0)点; 幅值裕量为4.12×104dB,闭环曲线远离(-1,j0)点。频率特性分析可以实现被校准力传感器的稳定性判断。
