基于模糊PID的永磁同步电机容错自动控制系统设计*
2021-06-28李全军
李全军
(淮南职业技术学院机电工程学院,安徽 淮南 232001)
引言
科技创新发展背景下,永磁同步电机凭借其更高的气隙磁通密度、更高的功率密度,被工业领域广泛应用.再加上永磁同步电机具有高效节能的特点,越来越多与工业领域相关的行业和工程项目,都利用永磁同步电机来替换异步电机,可见永磁同步电机在未来,会有更广泛的发展趋势[1].
为了加强永磁同步电机的自身功能,传统方法一提出六相永磁同步电机鲁棒自适应反步滑模容错控制,设计全新的自动控制系统,利用零序电流中线补偿,构建容错矢量控制结构;同时为解决绕组缺相故障导致的转矩脉动问题,利用鲁棒控制思想,自适应估计负载扰动,实现对故障的自动控制[2].而传统方法二提出绕组开路故障下的双三相永磁同步电机容错控制,建立故障下的系统数学模型补偿前馈,并优化容错控制策略,实现对原有系统的改进[3].
此次研究以上述提到的两种系统为研究依据,设计一个基于模糊PID的永磁同步电机容错自动控制系统.模糊PID其原理就是利用模糊控制算法,随时调节永磁同步电机故障数据的一种自适应控制方法[4].模糊PID将工程设计与操作经验相结合,用控制规则将成功经验转化,生成模糊规则表,得到最佳PID控制参数,以此实现永磁同步电机的容错自动控制.
1 设计永磁同步电机容错自动控制系统硬件
1.1 设计电压检测电路
估算永磁同步电机转子位置时,将电机绕组电压作为输入信号,用来直接检测直流母线电压,替代绕组的三相电压.根据图1所示的逆变电路图可知,逆变电路具有特殊性,因此自动控制系统通过电压检测电路,检测直流母线电压,然后配合功率开关管的通断状态,判定永磁同步电机的电压值.假设电压检测电路检测到的母线电压为V,利用符号Z表示逆变电路中,功率开关管的通断状态[5].当通路T1和T4导通时,Z=1,加到A相绕组上的电压为VA,当T2和T4导通时,加到A相绕组上的电压为0;当T2和T3导通时,Z=-1,加到A相绕组上的电压为-VA.

图1 逆变电路图
此次设计的电压检测电路,选用CHV-25P电压传感器,检测直流母线电压.该传感器采用霍尔磁补偿原理,利用其原副边之间的绝缘特点,直接测量直流电压、交流电压和脉冲电压.默认系统的母线电压在100 V以下,因此选用的电压传感器实际型号为CHV-25P-100.该传感器的额定电压为100 V,测量范围在0~±150 V之间;原副边匝数比为2 500∶1 000;该设备采用±12~±15 V的双供电电源.当永磁同步电机的工作环境在25 ℃时,其检测精度可达±1%[6].传统系统中,处理器只能处理数字信号,而CHV-25P-100电压传感器,输出的是模拟信号,因此,电压检测电路的检测信号,需要A/D转换.但由于各个硬件之间的电压是不同的,因此设计一个调理电路,如下图2所示.
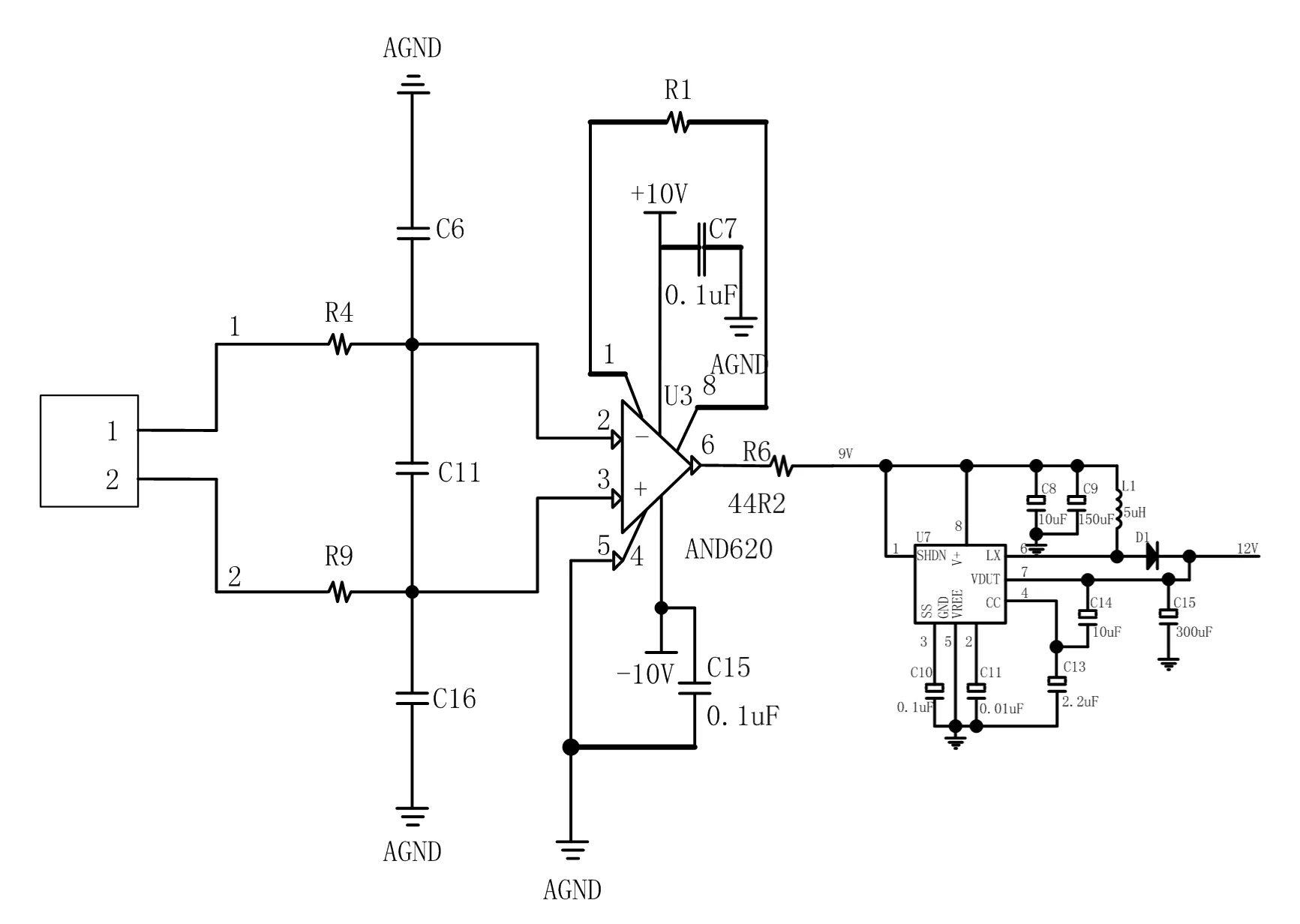
图2 电压调理电路
该电路将电压传感器0~5 V的输出电压,转换为0~3 V的输出电压,以此满足控制芯片的A/D转换效果,实现对容错自动控制系统,电压检测电路的设计[7].
1.2 设计转速检测电路和隔离电路
为验证永磁同步电机转子位置估计结果可靠性,在容错自动控制系统中,检测实际转子位置的装置.已知现阶段电机测速装置,包括数字测速、模拟测速.但由于模拟测速的成本高,因此设计的转速检测电路,采用数字测速装置.测量电机转速需要旋转编码器,该装置有绝对式、增量式两种类型.同样考虑设计成本问题,采用增量式编码器设计转速检测电路.因为增量式编码器的输出高电平为5 V,而系统控制芯片的电平,要求不高于3.3 V,因此设计一个调理电路转换电平,该电路如下图3(a)所示[8,9].

(a)转速调理电路
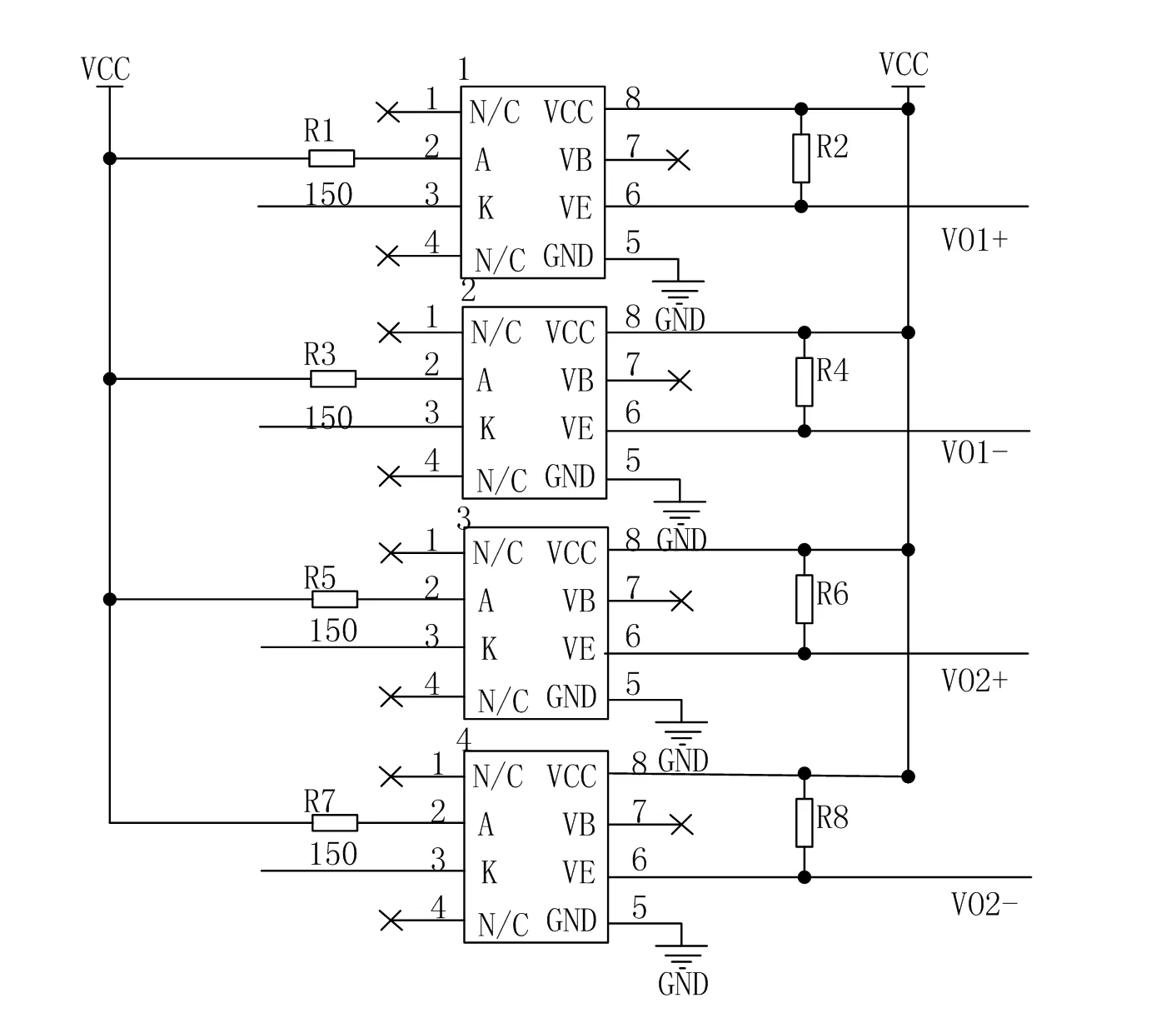
(b)隔离电路
该电路利用高速光耦转换电平的同时,还隔离保护永磁同步电机电气,使转速检测电路的使用更为稳定.而系统芯片提供的控制信号,为弱电信号,因此还要设计隔离电路.该电路如上图3中的图(b)所示.已知功率开关管是强电中的一部分,而电机工作会产生噪声串扰和电磁干扰,因此为了保证系统信号的真实性,利用图3(b),隔离电路隔离电气[10,11].至此在考虑模糊PID的基础上,设计全新的系统自动控制硬件.
2 设计永磁同步电机容错自动控制系统软件
2.1 制定容错自动控制策略
硬件设计完毕后,制定系统容错自动控制策略.当永磁同步电机k相绕组断路时,其他绕组电流及定子永磁体,产生的磁链在k相绕组产生感应电势,由于电流归置为0,不再参加能量转换,导致相转矩缺失引起转矩脉动问题[12].根据功率守恒定律,可计算永磁同步电机断路时的瞬时电磁转矩,公式为:

(1)
式(1)由恒定量及交变量组成,式中:e表示能力值;t表示时刻;We(t)表示瞬时电磁转矩;η表示谐波磁势次数;Km表示谐波电流注入值;i表示故障前后,电机基波转矩电流分量,需维持的恒定值;c表示永磁同步电机相;α表示电流轴向[13,14].公式中的恒定量,决定输出平均转矩;交变量则决定输出脉动转矩.故障后的电机处于相不对称运行的状态,而调整正常相的电流的过程,就是容错控制过程.此次制定的容错自动控制策略,利用永磁同步电机,自身固有的n次谐波子空间,控制自由度,通过多次划分H种谐波电流注入模式,补偿谐波脉动转矩,实现系统的容错自动控制.当谐波电流注入次数为3次时,令:
iβ 5=iγ 5=iβ 7=iγ 7=0
(2)
当谐波电流注入次数为3次或5次时,令:
iβ 7=iγ 7=0
(3)
当谐波电流注入次数为3次、5次以及7次时,令:
i3≠0,ia≠0,i7≠0
(4)
上述三组公式中:β、γ表示谐波电流轴向;a表示一个正整数.以式(2)为例,删除变换矩阵中与5次以及7次谐波电流相关的列,得到变换矩阵:
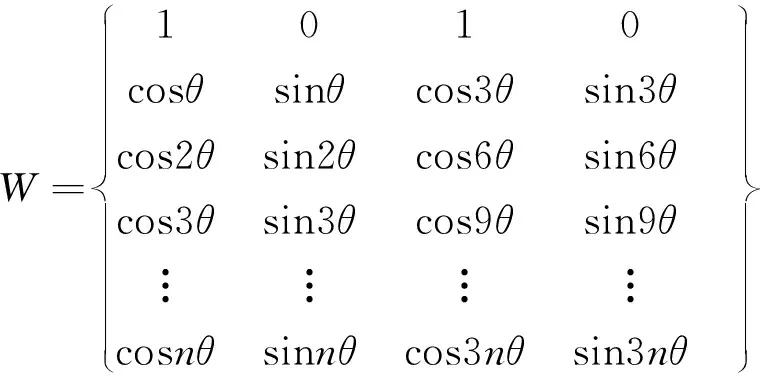
(5)
式(5)中,θ表示变换后的电流轴向.谐波电流注入后,改善了电机输出转矩性能,但引入的谐波电流,会增大定子铜耗,降低电机效率.因此将最小铜耗作为附加条件,将定子铜耗设置为:
(6)
式(6)中:Ii表示相电流向量;R表示电阻.按照上述分析过程,对式(3)、式(4)进行转换与设置[15].根据上述所得结果,制定容错自动控制策略.
2.2 模糊PID控制永磁同步电机各个工作环节
模糊PID控制按照其控制环节,划分为偏差比例环节、偏差的积分环节、偏差的微分环节,分别用P、I、D表示.模糊PID控制永磁同步电机各个工作环节时,需要为不同环节设置参数,实现对电机工作的稳定控制.令r(x)表示自动控制系统的输入量;s(x)是自动控制系统的输出量,二者之间的差值,构成f(x).根据上述自动控制策略得出输入、输出变量、差值变量,得到三者之间的关联,式(7)如下所示:
f(x)=r(x)-s(x)
(7)
将f(x)作为PID的偏差输入量[16,17].假设PID输出量为g(x),则PID的控制永磁同步电机的数学表达式为:
(8)
式(8)中:BP表示偏差比例环节P的控制器比例系数;TI表示控制器积分时间;TD为控制器微分时间[18].
模糊PID控制将PID控制过程作为依据,通过设置模糊控制算法,实现对电机各个工作环节的自动控制.设输入论域为[-F,F],向其中加入伸缩因子,得到新论域Y=[-g(f)F,g(f)F],其中g(f)是一个以f为输入量,g为输出量的伸缩因子函数.加入变论域的模糊PID,为了避免扩大论域对系统的影响,将初始论域作为最大限度论域,此时伸缩因子的取值在[0,1]之间.以此将误差控制在最小,并有效压缩论域,阻止误差过大导致论域膨胀的现象[19].
存在函数g:Y→[0,1],其中∀f∈Y,且g(f)=g(-f),这表示函数的对偶性.而g(0)=ζ,ζ为极小的正数,表示了函数的避零性.同时g在[0,F]上单调递增,g(±F)=1,均表示函数的单调性和正规性,加上|f|≤g(f)F,因此得到伸缩因子的函数模型:
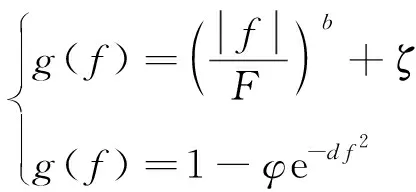
(9)
式(9)中:系数b与系数φ,分别表示一个常数,其取值范围为(0,1);d表示一个大于0的实数.根据上述算法得到模糊PID对永磁同步电机,各个工作环节的控制效果图,如图4所示[20].

图4 模糊PID控制示意图
利用上述设计的控制程序,实现模糊PID对永磁同步电机所有工作环节的工作容错自动控制,至此该容错自动控制系统,全部设计完毕.
3 仿真实验
搭建仿真实验测试平台,测试此次研究的自动控制系统,并根据测试结果,调试其中不合理之处.调试完毕后,将此次设计的系统,作为实验测试对象.根据文献[2]和文献[3]设计的传统系统,作为对照组测试对象,比较不同系统使用下,对永磁电动机容错的自动控制效果.将一台额定功率为10 kW的9相永磁电动机,作为仿真测试的研究对象,利用仿真工具模拟该电机故障问题.利用工具Simulink和工具Matlab,构建永磁同步电机及其容错自动控制系统模型.仿真测试假定电机给定负载转矩为50 N·m,转速设置为300 r/min.试运行仿真模型15 min,测试仿真平台的运行是否可靠,无数据误差和结构故障问题后,调试此次设计的控制系统.
3.1 系统调试
已知仿真测试模拟永磁同步电机在所有工作环节中,共存在5处问题,图5为所设计系统对5处问题的容错控制效果.

图5 容错自动控制效果
根据图5中的容错控制波形,发现5组容错自动控制中,第2组波形在得到有效控制后,再次出现了剧烈波动.经过查找与分析,发现对第2组故障进行容错控制时,控制系统出现了供电电源不稳的现象,因此导致有效控制故障后,又出现了剧烈波动.再次调整测试平台,对5个故障问题,进行第二次容错控制测试,控制效果如图6所示.

图6 第二次容错控制效果
根据图6中曲线波形可知,该系统完全控制了电机的容错问题,可见该系统可以投入正常使用.分别利用三个控制系统,对前三组故障进行容错控制,比较不同系统的控制性能.
3.2 对比测试
图7为三个测试组对永磁同步电机中,前三组故障的容错自动控制效果图.

(a)文中系统
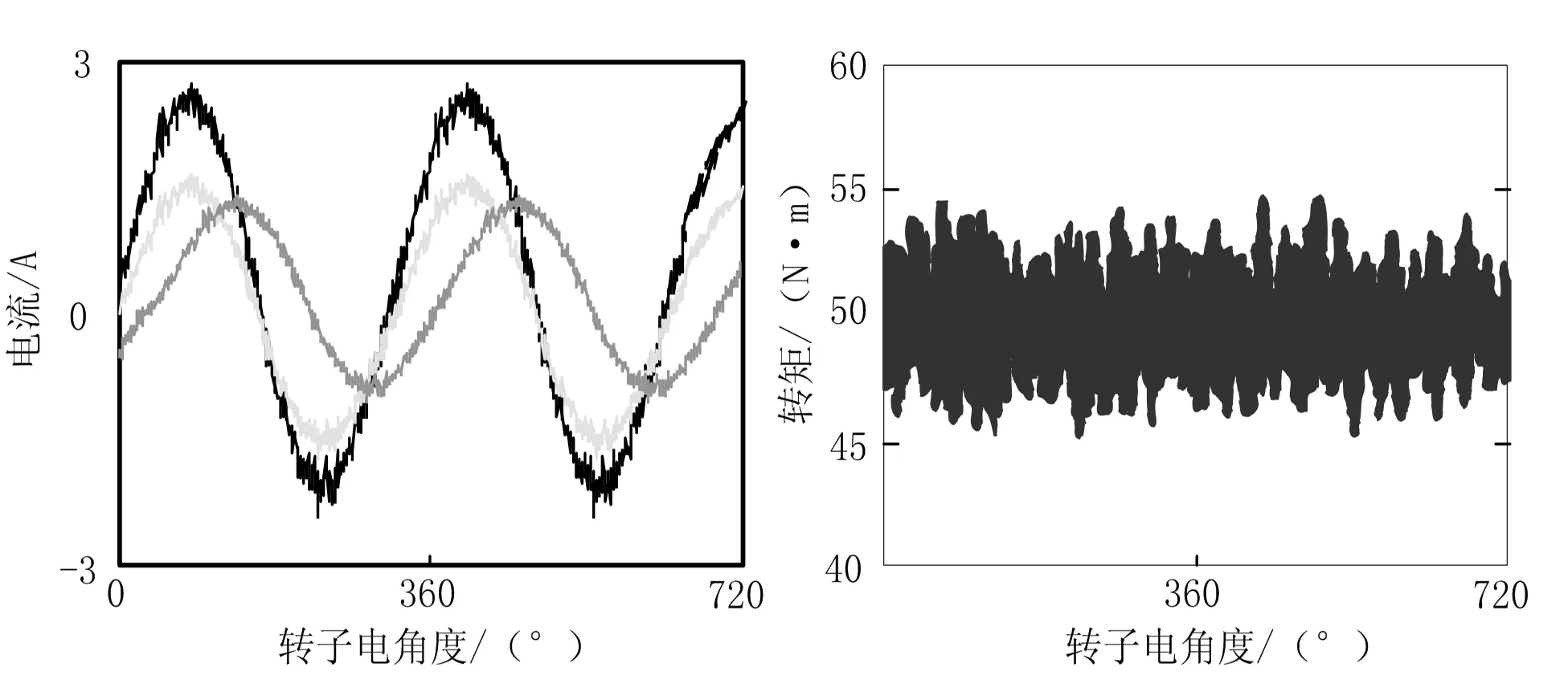
(b)传统系统1

(c)传统系统2
根据图7中电流示意图和转矩示意图可知,此次研究所设计系统,将电流控制在正常工作状态,且转矩的波幅,也稳定在一个固定的区间内.而两个传统系统,其容错自动控制效果较差,三个故障处的电流运行极其不稳定,转矩波幅也在一个很大范围内,呈现剧烈波动状态.统计三个系统控制下,电机的性能指标,结果如下表1所示.

表1 系统控制下的性能指标 p.u.
根据表1中数据可知,此次设计的系统,极大解决了故障问题,将发生故障时的电流,最大限度控制在正常范围内.而传统系统的故障解决效果很不理想,根据表1中的数据可知,传统系统控制下的故障处电流值,与正常电流值相差较大.可见此次设计的系统,对电机的故障问题,具有更好的容错控制效果.
4 结论
此次设计的永磁同步电机容错自动控制系统,在保证硬件与软件兼容的基础上,充分发挥了模糊PID的控制功能,经实验调试后,取得了不错的研究成果.但该系统的功效,可能会随着永磁同步电机的升级,而失去最优控制效果,因此该系统在硬件设计上,可以重新设计电流检测电路以及驱动电路,为模糊PID的控制提供强大的硬件支持,为永磁同步电机的使用提供科学合理的技术支持.
