非接触物流纸箱尺寸自动测量系统的设计*
2021-06-28邱意敏李炜夏宏业
邱意敏,李炜,夏宏业
(1. 安徽工程大学检测技术与节能装置安徽省重点实验室,安徽 芜湖,241000;2. 安徽工程大学电气工程学院,安徽 芜湖,241000)
随着电子商务的迅速发展,人们对物流服务的需求量越来越大[1].而这些巨大的需求量在给物流企业带来巨大利益的同时,也给它们带来了一定的挑战.如何提高仓储空间的利用率、货物分拣效率和货车空间利用率已经成为每个物流企业为了降低运营成本、提升顾客吸引率而必须面临的问题.而解决这些问题的关键因素就是合理利用物流纸箱的尺寸信息[2-3].
目前,常用的物流纸箱尺寸测量法有人工测量、光幕测量、激光扫描测量和超声波测量等,其中,人工测量效率低下,且易出现差错;光幕测量对被测物品摆放要求高,且操作繁复[4];激光扫描测量对环境要求高,且成本昂贵[5];超声波测量抗干扰能力差,且方向性差[6].此外,大多物流纸箱尺寸的测量系统没有将物流操作环境的复杂性考虑其中,容易因物流纸箱摆放姿态不符合测量系统的要求而造成测量误差过大.因此,研究与设计一个操作方便、测量精度较高、性价比高的物流纸箱尺寸自动测量系统对促进物流行业的发展有一定的意义.
1 总体设计
根据物流纸箱尺寸测量的要求,针对目前物流纸箱尺寸测量系统存在的问题,设计了一个物流纸箱尺寸自动测量系统.该系统由两个物体尺寸测量装置构成的,它们分别置于物流纸箱相互垂直的两个竖立面,具体示意图如图1所示.该系统通过物体尺寸测量装置获取物流纸箱的两个立面的尺寸,再将所得的尺寸数据进行融合,从而得到物流纸箱的尺寸.由此可以发现,物流纸箱的尺寸均是通过物体测量装置获得的,它是整个测量系统的设计核心,故下文的硬件设计部分只对其作具体描述,物流纸箱尺寸自动测量系统仅需将两个物体尺寸测量装置进行简单的连接即可.
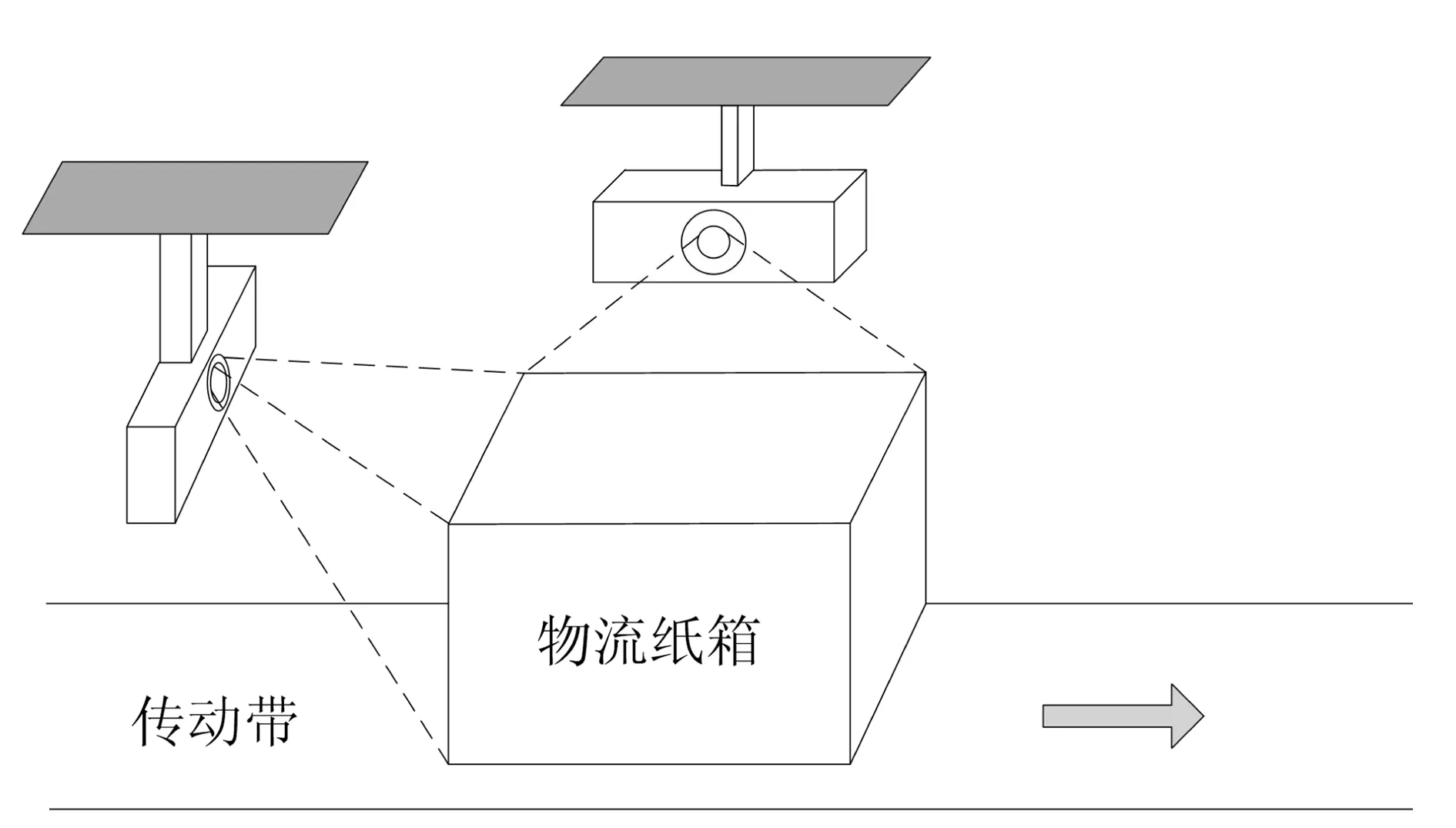
图1 物流纸箱尺寸自动测量系统示意图
物体测量装置总体框架如图2所示,主要由处理器模块、激光测距模块、OpenMV模块、液晶显示模块、舵机驱动模块和电源模块等部分组成.
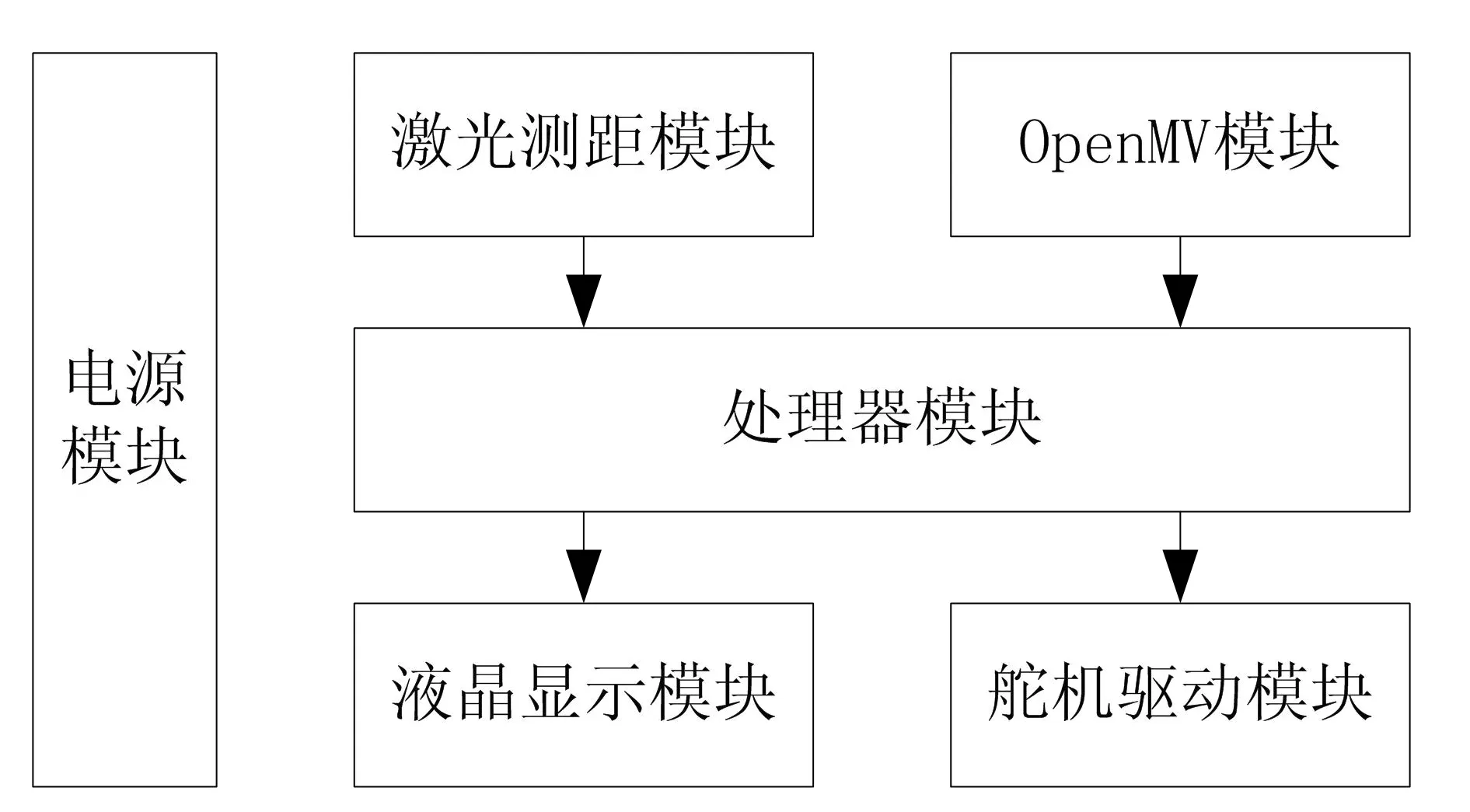
图2 物体测量装置框架图
其中,处理器模块主要是协调处理其它各模块的工作;激光测距模块主要是测量装置中心点至物流纸箱的距离;OpenMV模块[7]主要是测量物流纸箱竖立面的尺寸;液晶显示模块用于测量数据的显示;舵机驱动模块主要是调整激光测距模块和OpenMV模块的偏转角度;电源模块主要是为装置内的其他模块供电.
2 测量原理与分析
2.1 舵机旋转角度控制算法
利用位置式PID控制算法[8-9]对舵机旋转角度进行调节,从而控制激光测距模块和OpenMV模块的偏转角度,进而使激光测量模块发射的激光能指向OpenMV模块算出的物体纸箱竖立面的几何中心,具体如图3所示.
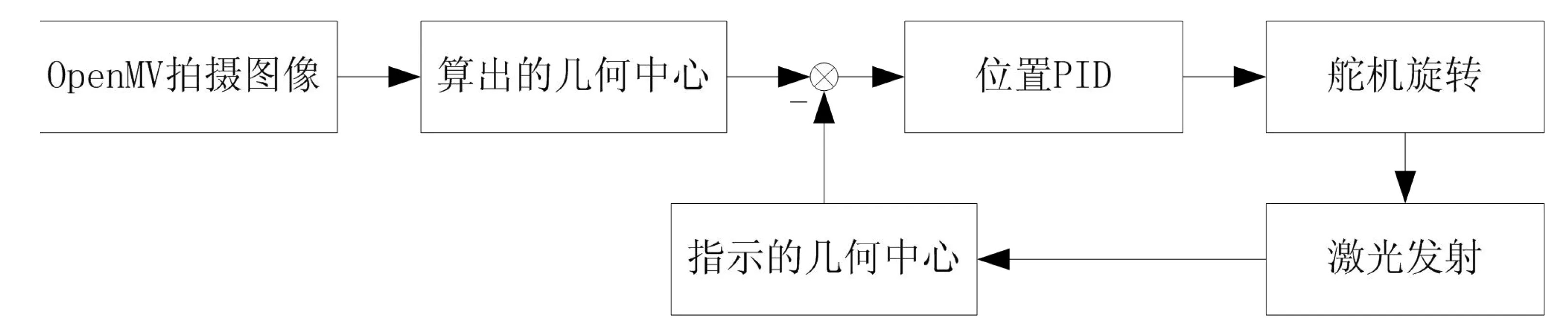
图3 位置PID调节舵机旋转
首先,将舵机旋转角度范围定为-45°至45°;然后,利用OpenMV模块摄取图像并算出物流纸箱竖立面的几何中心点;最后将激光指示的几何中心与算出的几何中心之间的位置偏差代入式(1)得到舵机的旋转角度u(n),直至两个几何中心的差值为0停止.
(1)
式中,Kp为比例系数,Ki为积分系数,Kd为微分系数,e(n)为第n次算出的几何中心与指示的几何中心的差值.
2.2 距离测量
物体尺寸测量装置通过记录激光测距模块发射出的激光到经被测量物体反射的往返时间,计算出物体尺寸测量装置和被测量物体之间的距离.激光测距模块的原理如图4所示.距离计算公式由式(2)计算,式中v是激光的速度,t是发出激光至接收反射激光的时间.
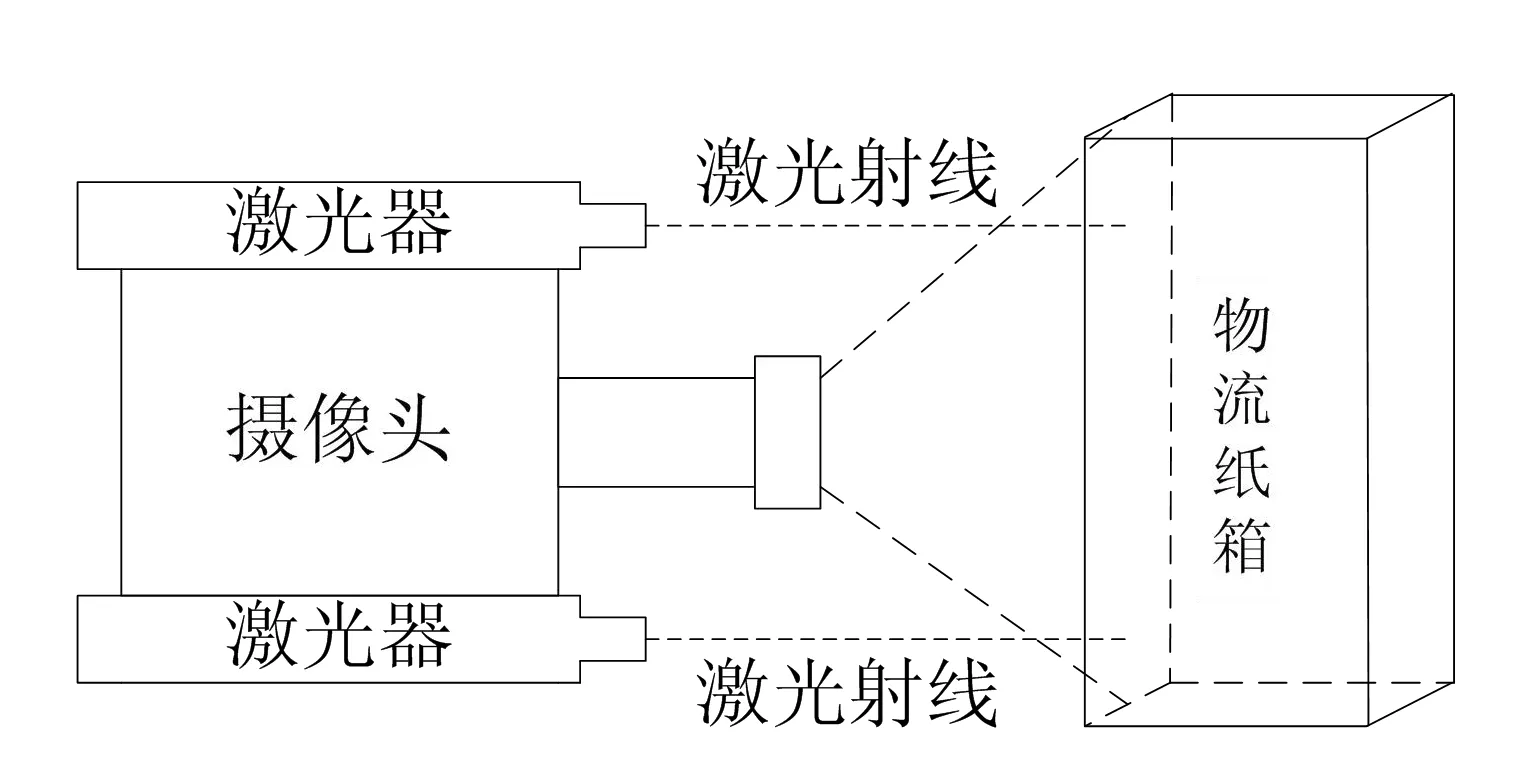
图4 激光测距原理
(2)
2.3 物体尺寸测量
利用OpenMV模块拍摄物流纸箱形状的轮廓,利用二值化[10]、边缘检测等方式对采集到的图像进行处理[11],再根据目标距离与像素点之间的比例关系计算获得物流纸箱的尺寸[12].被测竖立面的一边边长的测试结果由公式(3)、(4)计算.
(3)
式中a为视角的一半,Apix为固定像素,L′为固定距离.
(4)
式中Lm是目标距离,Bpix是目标所占像素,Rm是目标实际边长.
3 硬件设计
3.1 处理器模块的设计
为了提高物流系统中其它环节的效率,必须加快物流纸箱尺寸的测量速度,因此,选择一个性价比高的处理器作为物体尺寸测量装置的核心单元至关重要.STM32F407ZG是一款具有DSP和FPU的32位高性能ARM Cortex-M4的处理器,CPU的频率高达168MHz,其内部集成的ART加速器能够大大加快运算速度[13].此外,其还具有内存较大、库函数多、性价比高等特点,因此,能够满足该装置测量物体尺寸功能和速度的需要.
3.2 舵机驱动模块的设计
伺服电机只有在电压范围6V至8.2V之间才能工作[14],而且需要大电流.经选型,采用开关电源元件AS1015作为舵机驱动模块的核心.该模块的输出电压是由如式(5)所示的电阻之间的分压占比决定的.为了保证AS1015驱动电路输出电压在舵机运作时,仍能较好地保持在6V以上,可将舵机驱动模块的电路作如图5所示设计.
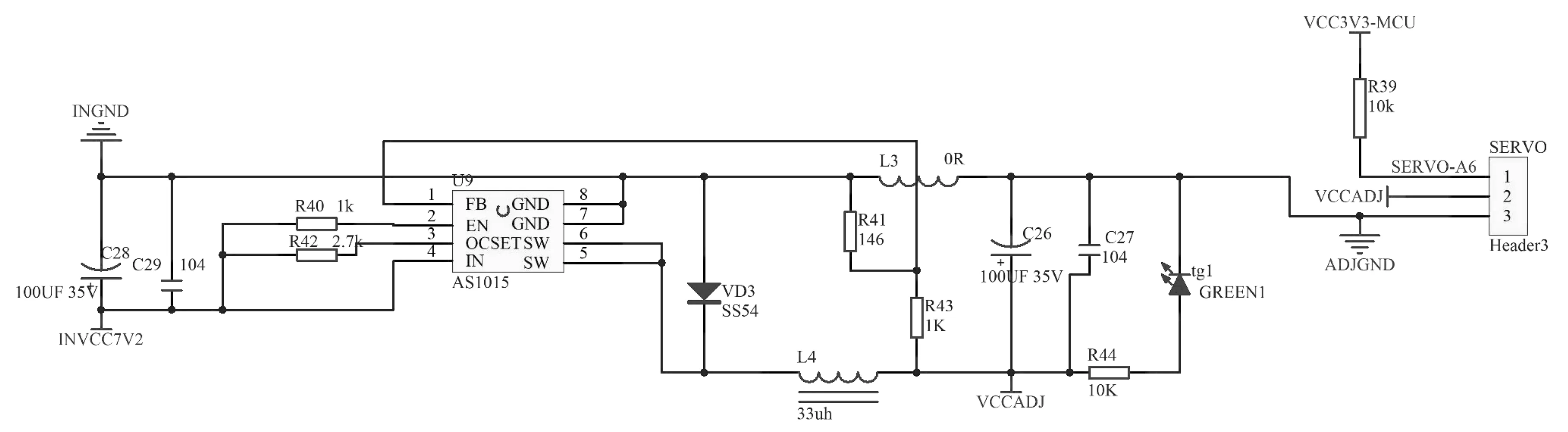
图5 舵机驱动模块原理图
Vout=0.8×(1+R43÷R41)
(5)
3.3 激光测距模块的设计
为了减轻伺服电机带动云台转动的负担,这里选用封装最小的VL53L0X激光传感器进行测距.作为ToF(飞行时间)激光测距传感器,VL53L0X主要是通过I2C接口进行数据传输的,故其可以通过图6所示的串口3与处理器模块进行连接.
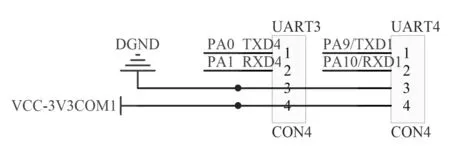
图6 激光测距模块原理图
3.4 电源模块的设计
该装置将7.2 V电池电源经LM2940和AMS1117稳压芯片进行转换,得到稳定的5 V和3.3V电压,分别为处理器模块、激光测距模块、液晶显示模块等供电,具体电路如图7和图8所示.
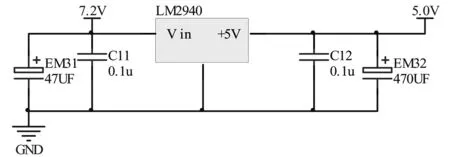
图7 7.2V转5V电路原理图
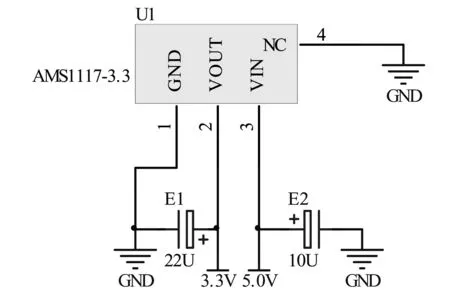
图8 5V转3.3V电路原理图
4 结构设计
由于物体尺寸测量装置需要利用舵机驱动模块同时调节激光测距模块和OpenMV模块的偏转角度,所以对支架的机械结构要求较高.根据上述硬件的选型,将OpenMV摄像头、激光传感器以及激光头嵌入,并使它们处于同一竖直面内,支架需采用L型结构.由于支架结构的独特性,故利用FDM 3D打印机对支架进行打印,支架结构设计图如图9所示,物体尺寸测量装置的实物图如图10所示.

图9 支架结构图
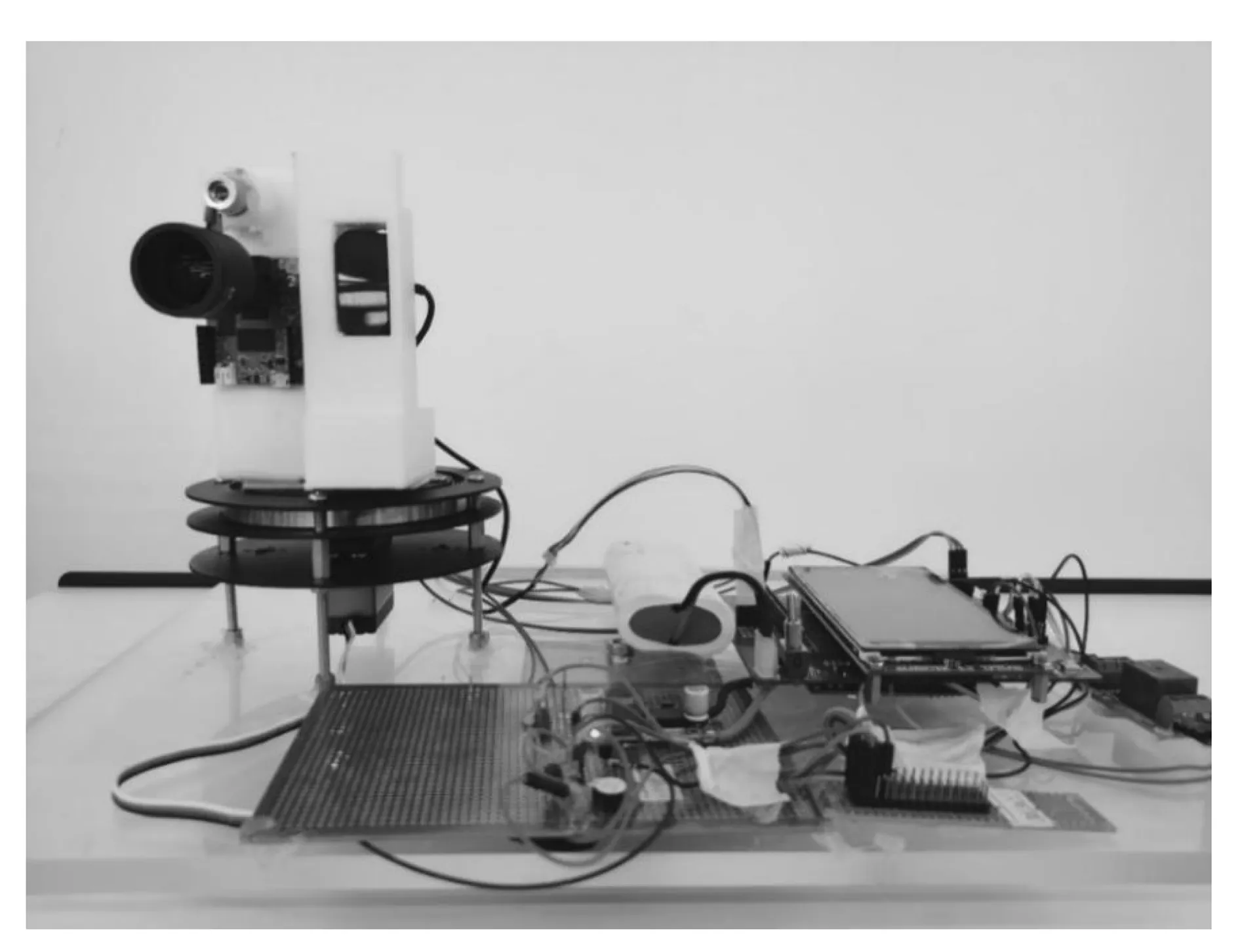
图10 物体尺寸测量装置实物图
5 软件设计及测试
5.1 软件设计
物流纸箱尺寸自动测量系统接收物体尺寸测量装置的数据,提取它们测得的竖立面中的竖直方向的边长进行对比,并取两者中的较大者作为物流纸箱的高,再结合两个竖立面中的水平边长,即可得到物流纸箱的尺寸,具体流程如图11所示.
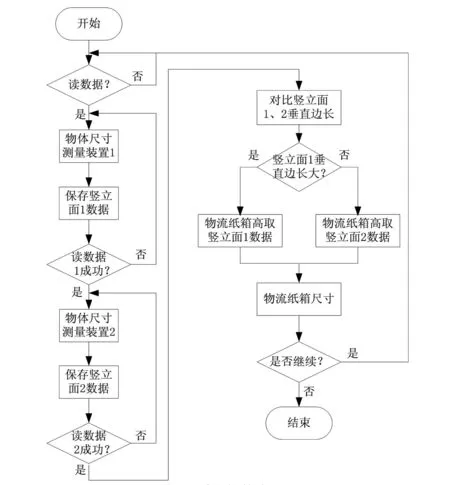
图11 系统软件流程图
作为物流纸箱尺寸自动测量系统的核心部分,物体尺寸测量装置主要依靠OpenMV模块和激光测距模块得到物流纸箱的尺寸.该装置通过比较利用OpenMV模块拍摄图像算出的几何中心与激光测距模块的指示几何中心之间的偏差值,利用位置式PID算法,调节舵机的旋转角度,直至被测物流纸箱的计算的几何中心与指示的几何中心几乎重合时,测量物流纸箱的尺寸,具体流程如图12所示.
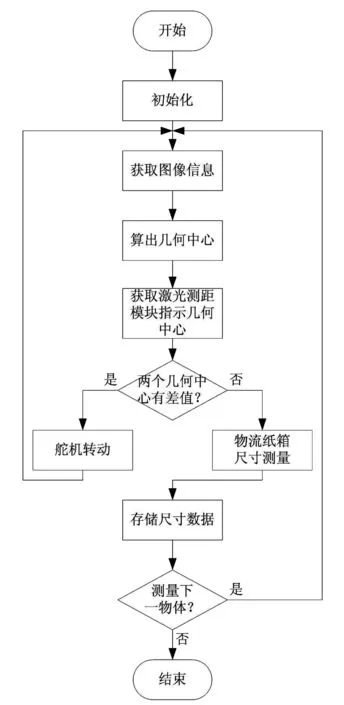
图12 装置软件流程图
部分位置式PID算法控制舵机旋转角度的程序如下:
void PIDControl(int Position) //位置式PID控制
{
int Position_P, Position_D, Position_PID;
static int Position_I,Last_Position;
if(Position_P==0)
{
Position_I=0;
Last_Position=0;
return(0);
}
else
{
Position_P=Kp*Position;
Position_I=Position_I+Position;
Position_I=(int)(Ki*Position_I+0.5);
Position_D=Kd*(Position-Last_Position);
Last_Position=Position;
Position_PID=Position_P+Position_I+Position_D;
if(Position_PID>45) Position_PID=45;
if(Position_PID<-45) Position_PID=-45;
return(Position_PID);
}
}
5.2 测试方法
由于难以搭建物流操作的真实环境,故利用背景板和不同大小的物流纸箱对设计的物流纸箱尺寸自动测量系统进行测试,具体测量方式如下:
1)OpenMV模块和激光测量模块正对物流纸箱.获取此位置OpenMV模块的图像信息和激光测距模块测量的物流纸箱与测量头之间的距离,计算出物流纸箱竖立面的尺寸;
2)OpenMV模块和激光测量模块不正对物流纸箱.托盘带动OpenMV模块运动和激光测量模块,直至算出的几何中心和指示的几何中心重合位置.获取此位置OpenMV模块的图像信息和激光测距模块测量的物流纸箱与测量头之间的距离,计算出物流纸箱竖立面的尺寸.
5.3 测试结果及分析
1)OpenMV模块和激光测量模块正对物流纸箱的测试.记录其每次测得的物流纸箱的边长、距离及测量时长.部分测试结果见表1.
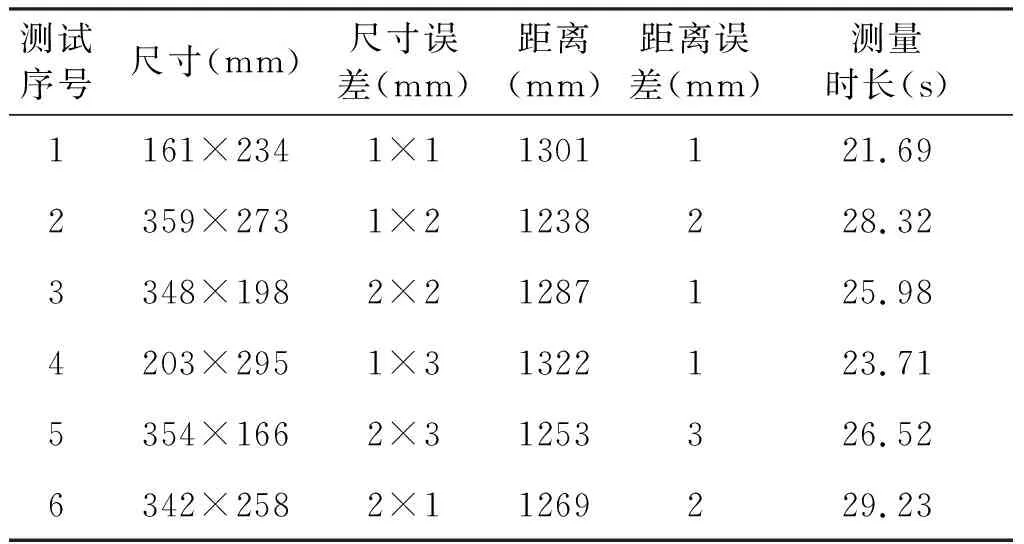
表1 部分正对物流纸箱的测试数据
2)OpenMV模块和激光测量模块未正对物流纸箱的测试.记录其每次测得物流纸箱的边长、距离及测量时长.部分测试结果见表2.
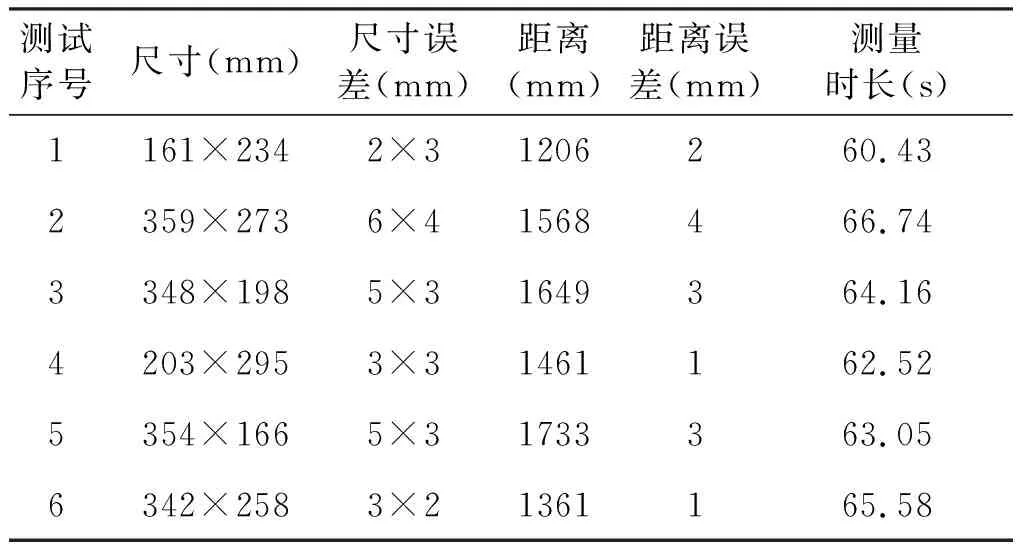
表2 部分未正对物流纸箱的测试数据
从表1和表2的测试结果,可以看出该物流纸箱尺寸自动测量系统测量误差较小,且在80 s内可以完成对物流纸箱尺寸的测量.对同一物流纸箱而言,OpenMV模块和激光测量模块正对物流纸箱的测量相较于OpenMV模块和激光测量模块未正对物流纸箱的测量,误差较小,且测量用时更短.
6 结论
结合目前物流纸箱尺寸测量系统的现状,本文设计了一款非接触物流纸箱尺寸自动测量系统.该系统利用位置式PID算法控制舵机旋转角度,使利用OpenMV模块拍摄的图片计算出的几何中心和激光测距模块指示的几何中心重叠,再结合激光测距的数据和图像特征信息提取的数据,最终实现物流纸箱尺寸的测量.实验结果表明,该系统测量误差较小,测量用时短,具有较高的测量效率,能够满足物流业对于物流纸箱尺寸测量的要求.
