基于PLC控制的深水网箱抗风浪系统研究
2021-06-28林寿英
郑 钊,林寿英
(福建农林大学机电工程学院,福建 福州 350002)
深水养殖成活率高,鱼类品质好,不但提高养殖质量和产量,而且促进经济发展,是渔业发展的趋势,前景广阔[1]。深水养殖网箱由于其本身的结构在平常的天气可以不受海风和海浪的影响,当台风到来时,由于风大浪大,网箱很容易受海浪冲击,冲击严重将导致网箱解体。研究表明,将网箱下沉距离一定水面深处时,可以根据波浪强度与水的深度增加呈指数衰减这一自然规律,将网箱下沉到水面以下一定高度来降低台风带来波浪冲击的影响[2]。因此,养殖人员平时需要注意网箱养殖区域的气候,在台风到来之前控制网箱下沉悬浮在距离水面一定高度,来降低大风浪的冲击。当台风过后控制网箱上浮,回到水面上,便于养殖人员对鱼类的喂养。通过网箱的沉浮实现抗风浪,保证渔业养殖的安全[3]。
1 网箱主体框架和测试环境
深水网箱直径20m,高10m。为了便于实验测试研究,本次采用直径为2m,高为1m的缩小版网箱进行试验调试,网箱主要由上下两个环形大浮管和中间环形固定管、底部两跟交叉管、脚架、16个PE浮筒和浮筒连接立柱组成。底部两根交叉管作为电控箱的安装固定支架,也对网箱底部固定起到一定作用。16个PE浮筒主要用于提供浮力,使得网箱能够漂浮在水面上。网箱各个部件的参数由下表1给出。

表1 网箱各个部件的参数
通过表格计算出网箱总的浮力大约为62.02kg,网箱总的重量为28.85kg,电控箱本身的浮力和重力相差无几,这里可以忽略不计。用于网箱沉浮的水槽高度为2m,直径为3m。网箱上部加高10cm用于覆盖渔网部分露出水面。
2 网箱沉浮控制
2.1 网箱沉浮功能实现
网箱最上面的圆形大浮管中间隔成四个部分,互不相通,每个部分上面有四个口与气管相连接,每个部分下面通过浮筒连接立柱与四个浮筒连接,将这四个部分分别命名为浮筒1到4组。网箱最底下的圆形大浮管也同样隔成四个部分,每个部分上面通过浮筒连接立柱与四个浮筒连接,每个部分底下与管道相连,管道的出口连接单向阀并安装在电控箱底部。之所以这样连接有两个目的,第一是电控箱距离单向阀比较近,电缆线从电控箱出来直接给单向阀供电,走线简单,防水措施容易;第二是单向阀在排水的时候,处在网箱底部中间,水排出来有向上的力有助于网箱上浮,如果排水口在网箱旁边就容易因为排水不均匀导致网箱上浮过程发生倾斜。
用于进水和排水的4个电磁阀是单向阀,为了区别另外4个用于进气的电磁阀,把进水/排水的电磁阀叫做电磁水阀,而用于进气的电磁阀叫做电磁气阀。水可以从圆形大浮管和浮筒中通过单向电磁水阀排出,而外面的水不能通过单向电磁水阀流进去,但由于电磁水阀在水底,外压大于内压,所以水不会流出去。正常情况下网箱顶部露出少部分在水面上,当网箱需要下沉时,上位机发送打开电磁水阀的信号给电控箱中的PLC,PLC接收到信号后打开四个单向电磁水阀,由于水中的压力大于浮筒中的气压,水就会通过管道进入圆形大浮管和浮筒中,使得整个网箱的重力大于浮力,网箱开始慢慢下沉,当网箱沉入水面的时候,就可以关闭单向电磁水阀使得网箱停止进水。如果需要网箱上浮,则上位机发信号打开电磁气阀,然后启动潜水泵,将浮筒中的水抽出,浮筒和圆形大浮管中又被空气占据,使得整个网箱的浮力大于网箱的重力,网箱开始慢慢浮出水面。
2.2 网箱控制系统
网箱采用两个PLC控制,一个放在网箱电控箱里面,为水下电控箱控制器,一个放在工作台电控箱里面,叫水上控制器,两个PLC通过型号为E90-DT的无线数传电台相互通讯。水上电控箱控制部分功能结构如图1所示。
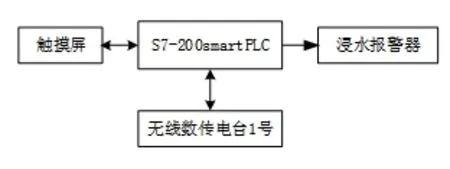
图1 水上电控箱控制部分功能结构
图1 中,可以通过触摸屏看到网箱的信息参数,并在上面对应功能区进行操作控制网箱。无线数传电台1号安装在工作台的电控箱中,与PLC通过串口通讯;浸水报警器在水下电控箱浸水时会接收到信号并报警,养殖人员就可以及时去处理漏水问题。图2为水下电控箱控制部分功能结构。
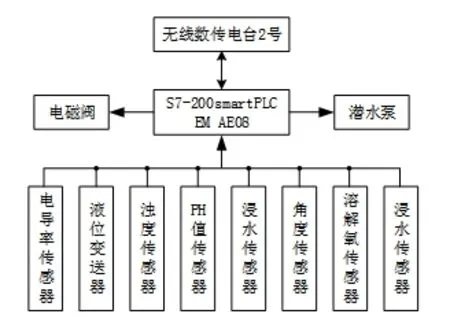
图2 水下电控箱控制部分功能结构
图2 中,水下PLC通过无线数传电台2号传输数据给无线数传电台1号,水上PLC读取数据后传到上位机和触摸屏上。传感器测得数据由EM AE08模拟量扩展模块采集,然后由水下PLC传给水上PLC,再由水上PLC传输到可视化界面上显示。电磁阀包括4个电磁水阀和4个电磁气阀,只有在网箱需要下沉时,才打开电磁水阀,水进入浮筒中网箱下沉,通过控制电磁气阀、电磁水阀和潜水泵三者之间配合,使网箱悬浮在一定水位高度后,就可以将这三者关闭;而网箱上浮时,只需打开电磁气阀和潜水泵,将浮筒中的水抽出,浮筒中的空间又被空气占据,网箱上浮稳定后关掉潜水泵和电磁气阀。因此,只有在网箱沉浮的过程中它们才工作,平常情况它们都处于断电状态,不会消耗电能。
2.3 触摸屏界面设计
触摸屏作为可视化界面,不仅可以监测网箱的各种参数并将需要的参数显示在触摸屏的界面上,还能通过界面上的按键来控制网箱系统实现对应的功能控制。倾斜监控指示灯可以直观的看出网箱是否倾斜,若网箱倾斜角度达到一定数值,这里设置为大于5°时表示倾斜明显,则对应方向的指示灯会变成红色。倾斜监控中的1、2、3、4分别对应1、2、3、4组浮筒,1组和2组浮筒和陀螺仪X相关,3组和4组与陀螺仪Y轴相关。紧急急停功能主要用于调试过程中发生意外情况时进行急停。浮筒1水位对应的是浮筒1组上面两个浮筒注水高度。
3 网箱沉浮测试
在进行网箱的沉浮测试中,正常情况下网箱顶部露出一小部分漂浮在水面上,当上位机发送下沉命令给水下电控箱打开电磁水阀,水进入网箱上的浮筒中,网箱开始下沉。受实验条件影响,这里设定下沉的深度为40cm。通过潜水泵、电磁水阀和电磁气阀三者之间相互配合调节,使得网箱悬浮在一定高度的水中。网箱底部中间白色部分为水下电控箱。因为网箱悬浮,左右不受力,而水面水流的冲击力使得网箱偏到水槽的另一边。
当网箱需要下沉悬浮抵御台风时,设定网箱下沉40cm,点击下沉,通过PID调节后,网箱悬浮在距水面高度41.70cm处,与设定的40cm相差较小,故认为控制系统能够实现网箱悬浮控制。测得陀螺仪X轴没有偏移,即1组浮筒和2组浮筒处于平衡,Y轴有0.92°的偏差,即4组浮筒高于水平面0.92°,不过数值较小,可忽略不计,当偏移超过5°才认为网箱失去平衡,故可以认为网箱是处于平衡状态没有发生倾斜。
当网箱需要上浮时,只需点击界面上的上浮功能,水下电控箱控制器打开电磁气阀,潜水泵将浮筒中的水抽出,空气进入浮筒中,使得网箱浮力大于重力,网箱就逐渐浮出水面。待水抽完就可以关掉潜水泵和电磁气阀。如图4网箱浮出水面界面所示。

图3 网箱悬浮控制界面

图4 网箱浮出水面界面
4 结语
本研究通过对深水养殖网箱在面对台风天气时,养殖人员的远程操控进行了模拟实验。通过触摸屏界面远程控制网箱系统的下沉和上浮,下沉时网箱可以悬浮在设置的液位高度中。在网箱下沉与上浮的过程中,陀螺仪偏移量均在误差允许范围内,即可视为网箱在沉浮过程中依然保持平衡。并能够实时传输网箱内部的环境信息到触摸屏界面显示。因此,所研究的抗风浪系统对扩展渔业深水养殖具有一定的价值,为渔业产业提质增效提供路径,是渔业产业发展的需要。
