基于无人集群的指挥控制架构研究∗
2021-06-28张卓翔赵方亮张耀鸿
张卓翔 赵方亮 张耀鸿
(国防科技大学系统工程学院 长沙 410005)
1 引言
在信息化战争时代,越来越多的无人作战装备在现代战场上得到越来越广泛的应用。由于单个无人作战装备所能执行的任务比较单一有限,而通过多个无人作战装备的能力互补和行动协调,可实现整个系统效能的提升,无人作战的形式逐步从单平台向着多平台的“集群式”方向发展。对于“集群式”的无人作战体系,若没有适应作战环境的科学高效指挥控制架构,无人集群将难以发挥多平台系统的优势,各个无人作战装备之间也会由于缺乏有效的协调而降低任务完成的效率甚至出现矛盾冲突。因此,建立一种科学高效的指挥控制架构,对于无人集群更好地适应环境,最大化发挥系统优势,提高作战效能,高效完成作战任务有着极其重要的现实意义。
本文将从无人集群和指挥控制的研究情况入手,尝试提出一种基于无人集群的复合型指挥控制架构,旨在挖掘单个无人作战装备的发展潜能的同时,有效将无人集群通过指挥控制架构有机的联合起来,实现“1+1>2”的作战效能,并通过基于熵理论的指挥结构评价方法分析复合型指挥控制架构的作战效能。
2 无人集群
2.1 无人集群概念
无人集群最初起源于无人机。随着信息技术的发展和无人机运用范围的扩展,无人机的应用从单一独立执行任务向着具有地面控制站、测控系统、通信系统等组成的无人机系统方向发展,逐步形成了具有一定自主协同能力的无人机集群。随着无人技术在其他无人作战装备上的普及,集群技术也在无人车、无人舰艇和无人潜航器上得到应用。无人机集群也逐步发展为无人集群。
2.2 无人集群的作战特点
2.2.1 自主协同控制
无人作战装备由于其无人特性,需要具备一定的自主控制能力。在无人集群作战环境下,无人作战装备需要根据实时的战场环境态势变化做出合适的反应,对于一些简单的行为,无人作战装备应该能够自主识别以减短反应时间,有效降低作战人员的工作负荷。对于无人集群,要充分发挥集群智能优势,实现1+1>2的无人集群系统作战效能。发挥系统优势要解决好无人作战装备之间,作战人员和无人作战装备之间的协同控制问题。
2.2.2 信息感知与共享
现代战争中,战场环境越来越复杂多变,信息已逐渐成为了能否取得战场先机的决定条件。对于无人作战装备来说,其轻便灵活机动的特点,可以充分发挥出信息感知的优势。借助多样的传感器和现代侦察手段,无人作战装备可以自主感知地理、电磁、气象等战场环境变化。对于无人集群来说,大量无人作战装备各自感知到的多源异类信息,在提供给后台终端处理的同时,各无人作战装备之间也应该能够通过网络化通信技术做到实时信息共享。
2.2.3 作战力量灵活配置
在快节奏的现代战争中,武器系统需要面对灵活多变的战场环境,在极短时间内快速配置武器力量并在搞对抗环境中做出对抗反击。无人作战装备的大量应用和普及,使武器力量的配置也有了更多的可能。不同于传统武器,无人作战装备具有低成本灵活机动的特点,可以快速进入战场。针对不同的战场环境,无人战车、无人机、无人舰艇、无人潜水器等组成的异构无人集群可以和传统的作战力量进行灵活配置,充分发挥武器系统的系统优势。
3 基于无人集群的指挥控制架构
3.1 OODA环指控模型
美国空军上校John Boyd在20世纪80年代提出的OODA环理论是由观察、判断、决策、行动四个环节构成的决策环路。OODA环理论四个基本环节中,观察是对战场环境进行侦察感知,得到战场环境的信息和数据;判断是对得到的战场环境信息进行战场态势的分析和评估,对信息数据进一步加工处理;决策是指挥员根据分析得到的战场态势和敌我状态,制定出合适的作战方案;行动是依据决策阶段制定的行动方案来实施作战行动。
3.2 复合型指挥控制架构
无人作战系统作为一个大规模的复杂系统,如何基于大量具有一定自主能力的个体,提高各个个体和各子系统之间的耦合能力,发挥出更大的系统优势,成为了无人作战和指挥控制方面一个亟需解决的问题。基于传统的OODA环理论,尝试提出一种适用于现代化战争和无人作战的复合型指挥控制架构。
作为一个具备能够独立完成作战任务能力的无人作战系统,应该由无人作战集群,战场作战人员,远程服务器,后方指挥部四个部分组成。如图1所示。
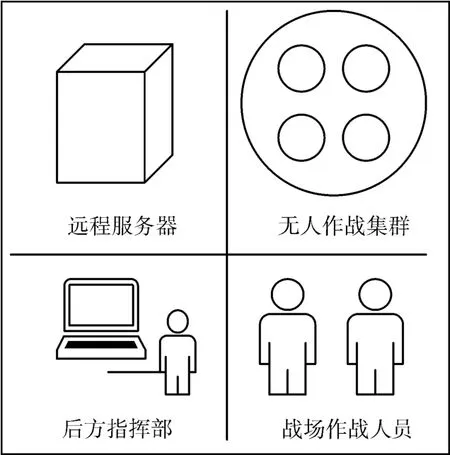
图1 无人作战系统构成
为了应对复杂多变的战场环境,参考OODA环的作战理念,加快作战行动中的“观察-判断-决策-行动”循环,本文提出的复合型指挥控制架构,围绕作战任务,将整个作战行动细化为大量的子任务,依据不同子任务的类型和难度等级采取不同的指挥决策方式,也就产生了不同的OODA环。
对于难度较低的Ⅰ类任务,OODA环将只会在终端服务器和无人集群内部完成循环过程。各无人作战装备通过各个传感器感知战场信息,并将大量的信息数据回传到后方的终端服务器,完成“观察”阶段。在信息共享的情况下,终端服务器接收来自各无人作战装备节点的信息流和数据流,对信息情报进行加工处理,实时更新战场态势,并针对各阶段的子任务做出辅助决策,完成“判断”阶段。各无人作战装备在得到终端服务器更新的战场态势和辅助决策后,依据自身的自主决策能力和各无人作战装备之间的协同能力完成“决策”和“行动”阶段。如图2所示。
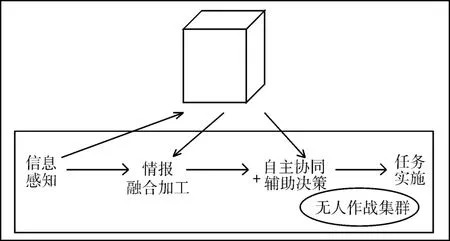
图2 Ⅰ类任务OODA环
对于稍复杂的Ⅱ类任务,基于Ⅰ类任务的OO⁃DA循环基础上,战场作战人员将会参与到OODA循环过程中。“观察”阶段同样由大量的无人作战装备完成。在Ⅰ类任务的OODA循环的“判断”之外,战场作战人员能够通过手持终端得到无人作战装备感知到的战场信息,并根据终端服务器处理后的信息情报进行进一步的加工融合。在“决策”阶段,战场作战人员依据终端服务器提供的辅助决策和自己的判断能力制定合适的作战方案。在“行动”阶段,对于一些复杂的行为,战场作战人员将会对无人作战装备的行动进行一定程度的干预。如图3所示。
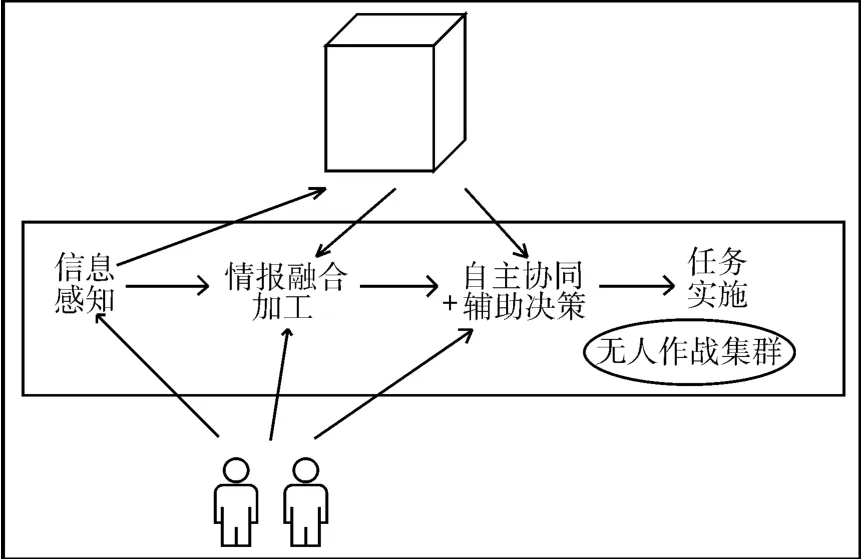
图3 Ⅱ类任务OODA环
对于难度较高,规模较大的Ⅲ类作战任务,无人作战系统的各组成部分都将会参与到OODA循环过程中。作为最高指挥层,指挥部的作用更多体现在对于战场态势的判断和作战行动的决策能力上。战争的最终执行者终归要落实到人上,人才是战争胜负的决定因素。指挥部能够将一些计算机无法量化的社会性因素考虑到战场态势的判断和指挥决策过程中。从战略层次上实现战略目标。如图4所示。
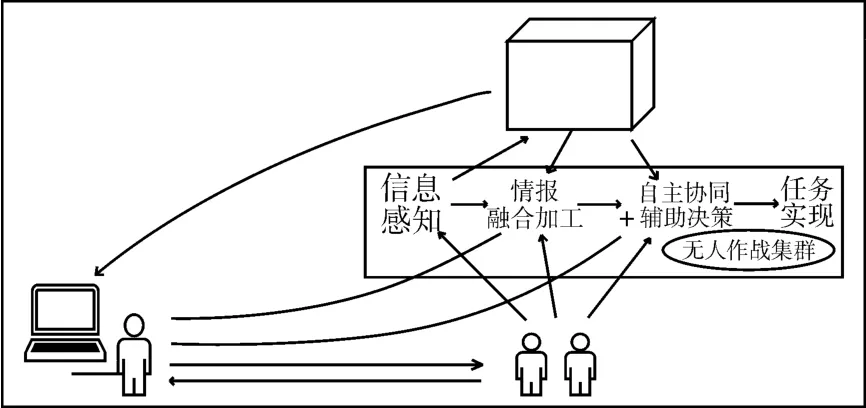
图4 Ⅲ类任务OODA环
以任务为中心的多层次指挥控制架构,能够适应复杂多变的战场环境,最大程度上更好更快地完成OODA循环,减轻作战人员的负担,提高作战效能,发挥无人作战系统的优势。
4 基于熵理论的指挥结构评价方法
4.1 熵理论
作为一个热力学概念,“熵”最初由德国物理学家克劳修斯在1856年提出。在热力学的基础上,信息论之父香农提出了“信息熵”的概念,用于信源不确定度的描述,将数学上的概率与信息的冗余度联系了起来。
4.2 指挥组织结构的结构熵
随着,“信息熵”理论的发展,熵学在管理学领域得到了广泛的应用,例如企业生产和公司管理,在军事上,“熵理论”主要用于指挥组织结构的作战效能评估。
由于“信息熵”理论主要是描述信源的不确定度,因此“熵理论”在评估指挥组织结构时,主要从信息流的角度出发。我们用时效性来刻画信息在组织体系中的运行速度,用准确性来刻画信息流在组织结构中的交互作用质量。为了能够定量分析指挥组织结构的作战效能,我们分别引用时效熵和质量熵的概念来分别度量指挥组织结构中信息流的时效性和准确性。
4.2.1 指挥组织结构的时效熵
为了使问题的描述简单起见,将指挥组织结构看成一个系统。我们用熵来度量信息在指挥组织结构中,各拓扑基层元素之间流通的时效性,并将之称为系统的时效熵。
在一个指挥层次为l层,指挥控制节点为N个的组织体系中,编号为i,j的节点之间的联系长度用L(ij)来表示,其数值为i,j节点之间的最短路径,每经过一个节点,长度增加1。
1)系统的时效微观态总数为

2)信息在第i,j个节点之间转移的概率定义为

3)第i,j节点之间联系的时效熵Ht(ij),定义为

4)按照系统的跨度由上至下,定义系统总的时效熵为
5)系统的最大时效熵定义为

6)系统的时效用R表示,则

系统时效R越大,说明该系统中信息流动的速率越快,同时也意味着在信息流动方面,系统有着更高的有序化程度。
4.2.2 指挥组织结构的质量熵
为了描述信息在指挥组织结构中流动的准确性,我们用熵来度量指挥信息的质量,并将之称为质量熵。其计算如下。
1)设k(i)表示指挥组织拓扑结构中联系跨度数,表示与第i个节点有直接联系的元素数量,则系统质量微观态总数为
2)系统第i个节点质量实现的概率pm(i)定义为

3)节点要素的质量熵Hm(i)定义为

4)指挥组织结构的总质量熵为

5)指挥组织结构的最大质量熵为

6)指挥组织结构的系统质量定义为

系统质量R越大,说明信息在系统中传递的准确性越高,同时也意味着在信息质量方面,系统有着更高的有序化程度。
5 无人集群的指挥组织结构效能评估
5.1 基于熵的指挥结构评估过程
引入指挥组织结构的结构熵概念,借助结构熵的评估方法,可以对指挥组织结构进行定量的分析评估,对于指挥组织结构的作战效能有一个更直观的认识。
运用结构熵评估一个指挥组织结构,基本流程如下。
1)对所要评估的指挥组织进行分析,明确指挥组织的内部结构;
2)将指挥组织的拓扑结构用树状图的形式表示出来;
3)计算各个节点元素和元素之间的联系长度;
4)分别计算指挥组织结构的时效熵和质量熵;
5)通过时效熵和质量熵对指挥组织结构进行评估。
5.2 计算过程
运用指挥组织结构熵的评估方法对复合型指挥控制架构中的三类指挥组织结构进行评估。拓扑结构和计算过程如下。

图5 三类任务的拓扑结构

图6 Ⅰ类任务指挥组织结构熵
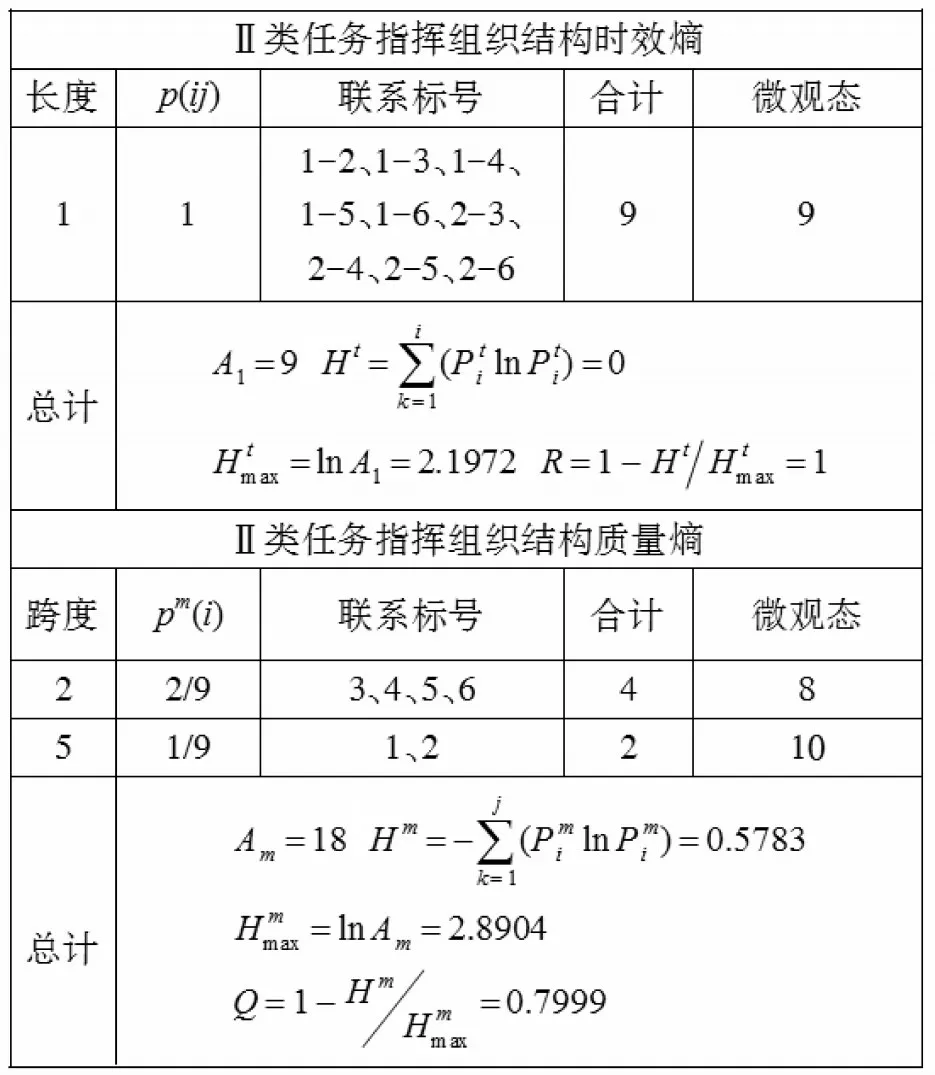
图7 Ⅱ类任务指挥组织结构熵
三类任务指挥组织结构的比较如表1。
从表1的比较可以看出,随着作战任务难度的增加,所采用的指挥组织结构的时效熵在增加,即信息传递的时效性在降低;同时,其质量熵在减少,即信息传递的准确性在升高。在综合考察系统时效性和准确性时,可以运用系统综合值(系统时效与系统质量的平均值)进行分析,当作战任务难度较低时,采用的指挥组织结构的中,信息流动的有序性较高。灵活配置指挥组织结构可以有效地提高作战效能。

表1 三类任务指挥组织结构
6 结语
本文主要针对无人集群作战,结合新兴的科学技术,提出一种能够适应现代化战争灵活多变的战场环境的复合型指挥控制架构,并运用定量分析方法对提出的指挥控制架构从信息流的“时效性”和“准确性”进行了计算分析。随着科学技术的发展及其在军事领域运用的不断扩展,无人集群的指挥控制架构也应该紧跟时代发展潮流,不断提高无人作战系统的作战效能。
