多信标融合综合定位系统后台子系统
2021-06-25刘挺方泽军黄昆达杜小甫
刘挺,方泽军,黄昆达,杜小甫
(厦门大学嘉庚学院信息科学与技术学院,福建漳州,363105)
0 引言
经过多年发展,高精度室内定位技术已经比较成熟,目前进入了技术落地的阶段。室内定位技术大多基于信号源,常见的信号源包括蓝牙[1],WiFi,超宽带等。不用信号源的定位技术包括地磁、惯导和视觉定位[2]等。针对多信标融合[3~4]的定位技术的研究,逐渐成为近年来的研究热点。
首先本文论述了一套采用多信标融合的、可应用在不同应用场景中的高精度室内定位系统。可以采用蓝牙、WiFi、超宽带等多种信标作为定位信号源。其次,本系统实现了三边定位算法、最小二乘法、扩展卡尔曼滤波等多种定位算法,并对算法进行了一定的优化。第三,本系统基于电信天翼云平台实现,各种定位信标数据上传到云平台,然后被后台管理子系统抓取,再经过定位算法解算,得到定位结果。最后,本系统实现了定位信息管理、在线三维地图显示等功能,其中在线三维地图功能基于Three.js开发实现。
本文提出的综合定位系统是一套通用的室内定位管理系统,其应用场景广阔。可以应用在很多场合,例如:单位内部定位导航、商场定位导航、大型停车场定位导航等场景。
1 系统设计
1.1 综合定位系统整体设计
“综合定位系统”的整体设计如图1所示。

图1 综合定位系统总体架构
感知层:这一层是整个系统的最底层,也是物理层,即所有直接参与定位的终端设备。整体分为定位终端和定位信标两大类设备,其中定位终端是指待定位的设备,一般放置在待定位人员或物体上。定位终端又分为主动定位终端和被动定位终端,主动定位终端是指本身具有运算能力,可以进行定位解算显示的设备,例如智能手机;被动定位终端则是不具有运算能力,只负责接收发送信号,它的定位要在后台服务器实现。定位信标,是指设置在固定位置,不断发射信号的设备,他们的信号可以被定位终端接收并结算。利用不同定位信标的信号和位置信息,可以计算得到待定位终端的位置信息。
传输层:是整个系统中的数据通道,负责定位数据和其他数据传输,能够连接感知层与服务层,实现双向通信。一般包括4G、5G移动通信,LORA、ZigBee自组网通信,WiFi、蓝牙局域网通信等技术。
服务层:这是整个系统核心层,主要包括系统云服务器和远程终端管理两部分。系统云服务器包含相关软硬件资源,本文论述的综合定位系统后台子系统就部署在云服务器上。远程终端则是任意一台可以联网的电脑,也包括智能手机,可以实现远程管理。
1.2 综合定位系统后台子系统设计
“综合定位系统后台子系统”是为“综合定位系统”服务的后台管理子系统,主要功能包括定位引擎和服务管理两部分。后台子系统的整体架构如图2所示。

图2 综合定位系统后台子系统架构
其中定位引擎包括定位信息接入模块和定位解算模块两部分。定位信息接入模块主要负责与定位终端的通信,定位解算模块负责对被动定位终端进行定位解算。
服务管理包括服务数据管理、服务展示和服务支撑三模块。数据管理模块负责管理定位系统中所有涉及到的相关数据;服务展示模块负责完成定位导航信息的实时显示、历史数据显示和数据分析显示等功能;服务支撑模块负责对外界提供第三方服务接口,以利于第三方进行二次开发。
在线三维地图属于服务展示模块,同时也涉及到服务数据管理的功能。首先地图绘制的数据由服务数据管理模块进行管理,然后在网页上绘制结果地图时,又由服务展示模块提供相应的绘图功能。
1.3 在线三维地图绘制技术设计
本系统采用基于浏览器的B/S结构,因此最终定位结果都要在网页中展示。本系统基于Three.js进行了二次开发,设计实现了在线三维地图的绘制模块。
目前比较通用的Web端3D绘图技术为WebGL(全名Web Graphics Library),新版HTML5 中通过控件canvas,可以绘制3D模型。而Three.js是由一位名叫Mrdoob的西班牙籍程序员开发的一款的基于WebGL的,开源JavaScript的第三方插件库。Three.js对WebGL提供的API进行了二次封装,使得开发者无需去书写那些复杂冗余的代码。通过使用three.js书写一些简单的代码即可实现复杂的三维图像渲染。
使用Three.js以及可以比较方便的进行在线3D图像绘制,但是具体到我们的应用场景中,还是有所欠缺。首先,Three.js本质上是利用javascript进行编程,并不支持数据库技术,因此不能进行数据库读写。其次,Three.js并没有针对地图绘制的优化。考虑到这些缺点,我们对Three.js进行再次开发,进行进一步封装,开发出可以更方便进行数据库读写,并绘制3D地图的javascript插件。
本文将系统分为五大模块。分别是模型导入模块,自适应渲染模块,性能监视模块,视角控制模块以及数据存储模块这五大模块。如图3所示。
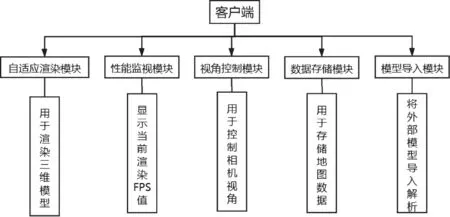
图3 系统功能结构模块
自适应渲染模块是核心,用于渲染生成在线3D图像。性能监视模块可以显示当前渲染FPS值,用于性能监控。视角控制模块提供与用户进行交互的接口,用户可以通过该模块实现图像的缩放、旋转、选择、平移等功能,该模块也是核心模块之一。
模型导入模块负责导入外部模型,与自适应渲染模块搭配使用。目前我们开发的版本支持的模型包括STL、PLY、OBJ三种模型文件。数据存储模块负责将模型数据存储在数据库中,并提供读取功能。方便模型数据长期保持,以及共享。
2 技术选型
本系统为综合定位系统的后台子系统,并没有考虑具体的应用场景。因此所选技术遵循成熟、够用原则,并不会过渡追求性能。开发语言选用JAVA,主要是考虑到后台定位解算算法的要求。采用J2EE企业级开发组件进行网站开发,配合Spring+SpringMVC+MyBatis框架使用。后台数据库选择MySQL数据库,Centos 7 操作系统,Apache+Tomcat网络服务器,搭建完整的私有云环境进行开发。
3 系统实现
本系统已经开发完成,如图4所示,是后台管理子系统的主页。信息管理内容包括:定位单位、区域、信标、终端、结果等管理,也实现了不同权限用户的管理。最后在“定位信息可视化”模块中实现定位结果在3D地图中的显示。

图4 后台子系统主界面
如图5所示,是3D地图绘制后的效果图。

图5 3D地图绘制效果图
4 总结
本文开发了一套多信标融合综合定位系统的后台子系统,基于电信天翼云进行数据传输,基于Three.js进行二次开发实现了在线3D地图绘制。该系统验证了多信标融合综合定位系统的开发可行性,证明其具有开发难度低,功能强大,性能优秀等优势。未来的工作中,我们将基于这个后台系统进行深入研究,实现指纹算法、基于深度学习的视觉定位算法等。